论文笔记:Visual Semantic Navigation Using Scene Priors
Visual Semantic Navigation Using Scene Priors
2018-10-21 19:39:26
Paper: https://arxiv.org/pdf/1810.06543.pdf
Demo:https://www.youtube.com/watch?v=otKjuO805dE&feature=youtu.be
本文将首先定义什么是 visual semantic navigation, 然后描述怎么利用深度强化学习的框架来解决该问题,以及该任务的 baseline model。
1. 任务的定义:
视觉语义导航(Visual Semantic Navigation),即在给定的环境中,当我们所要找的目标物体在我们的视野中,并且距离该物体比较近(低于某一阈值)。

2. The Baseline Model:
我们将该问题定义为 DRL 的框架,给定语义任务的目标 g,智能体接收到一个状态 s,然后根据策略 π 从可能的动作集合 A 中采样出一个动作 a。我们用 deep Policy network 来估计该策略。由于 visual states 和 semantic objective 来自于不同的模态,我们设计两支子网络,来将该两个输入映射到联合的特征映射中去(a joint visual-semantic feature embedding)。
Visual Network:如图2所示,该网络输入为 224*224 RGB images,产生一个 512-D 的 feature vector。所用的 backbone 网络结构是 ResNet-50,本文所提取的 feature 是经过全连接层 和 ReLU layer 之后得到的 512-D 的特征作为 visual-semantic feature。
Semantic Network:语义任务的目标是通过物体的种类来描述的,例如:微波炉,电视等等。本文用 fastText 来计算 100-D 的 embedding。然后将这些 Word embedding 映射为 512-D feature。
Actor-Critic Policy Network:我们采用 A3C 的模型来在每一个时刻进行 policy 的估计。A3C model 的输入就是联合的 current state 和 semantic task objective 的特征表示,即:1024-D feature vector。该网络产生两个输出,即:the policy and the value。我们从预测的 policy 中采样出 action。
Reward:我们考虑 reward 的设计,使其能够最小化与目标物体的轨迹长度:
如果在一定的步数之内,接近了目标种类中的任何物体,都给 agent 一个大的 positive reward 10;
否则,我们惩罚每一个 step,用一个小的 negative reward -0.01.
而对于不同类型的 action,作者也给定不同类型的 reward,即:是否是 stop action。
3. Generalization with Graph Convolutional Networks:
3.1. Knowledge graph construction:
我们的知识图谱提供了两个优势:
1). 其编码了不同物体种类之间的空间关系(the spatial relationships between different object categories)
2). 其提供了 the spatial and visual relationships between the known objects and novel categories in cases that we have not seen any visual examples of the novel categories.
我们将知识图谱表示为:G=(V, E), 其中,V 和 G 分别表示 nodes 和 edges。具体的来说,每一个节点 v 代表了 an object category, 每一个 edge e 表示了a pair of object categories 之间的关系。作者采用 Visual Genome dataset (https://link.springer.com/content/pdf/10.1007%2Fs11263-016-0981-7.pdf, Project Page:https://visualgenome.org/) 作为构建 the knowledge graph 的来源。Visual Genome consists of over 100K natural images. Each image is annotated with objects, attributes and the relationships between objects. Since there is no predefined object category list, the annotators are free to label any objects in the image, which results in very diverse object categories.

在我们的实验当中,我们构建了一个知识图谱,将所有的出现在 AI2-THOR 环境中的物体种类都囊括中该 graph 中。每一个种类表示为 graph 中的一个 node。我们计算统计了 the Visual Genome dataset 中出现的 object-to-object relationships 的次数。当两个节点之间的出现频率超过三次的时候,我们就用一条边来连接这两个节点。图3展示了部分示例,如下所示:

3.2. Incorporating Semantic Knowledge into Actor-Critic Model:

3.2.1 GCN:

3.2.2 GCN for Navigation:
这里作者就是利用 GCN 来建模多个物体词汇之间的关系,从而协助 agent 更好的感知所接触到的环境。
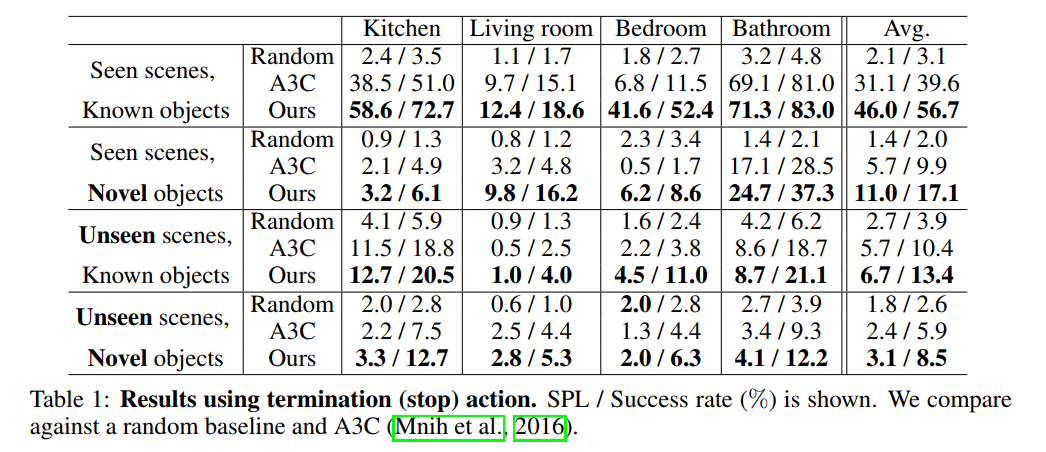
4. Experiments:


论文笔记:Visual Semantic Navigation Using Scene Priors的更多相关文章
- 论文:利用深度强化学习模型定位新物体(VISUAL SEMANTIC NAVIGATION USING SCENE PRIORS)
这是一篇被ICLR 2019 接收的论文.论文讨论了如何利用场景先验知识 (scene priors)来定位一个新场景(novel scene)中未曾见过的物体(unseen objects).举例来 ...
- 论文笔记:Semantic Segmentation using Adversarial Networks
Semantic Segmentation using Adversarial Networks 2018-04-27 09:36:48 Abstract: 对于产生式图像建模来说,对抗训练已经取得了 ...
- 论文笔记之:Visual Tracking with Fully Convolutional Networks
论文笔记之:Visual Tracking with Fully Convolutional Networks ICCV 2015 CUHK 本文利用 FCN 来做跟踪问题,但开篇就提到并非将其看做 ...
- 论文笔记: Dual Deep Network for Visual Tracking
论文笔记: Dual Deep Network for Visual Tracking 2017-10-17 21:57:08 先来看文章的流程吧 ... 可以看到,作者所总结的三个点在于: 1. ...
- 论文笔记之:Action-Decision Networks for Visual Tracking with Deep Reinforcement Learning
论文笔记之:Action-Decision Networks for Visual Tracking with Deep Reinforcement Learning 2017-06-06 21: ...
- Deep Reinforcement Learning for Visual Object Tracking in Videos 论文笔记
Deep Reinforcement Learning for Visual Object Tracking in Videos 论文笔记 arXiv 摘要:本文提出了一种 DRL 算法进行单目标跟踪 ...
- 图像显著性论文(一)—A Model of saliency Based Visual Attention for Rapid Scene Analysis
这篇文章是图像显著性领域最具代表性的文章,是在1998年Itti等人提出来的,到目前为止引用的次数超过了5000,是多么可怕的数字,在它的基础上发展起来的有关图像显著性论文更是数不胜数,论文的提出主要 ...
- 论文笔记之:Spatially Supervised Recurrent Convolutional Neural Networks for Visual Object Tracking
Spatially Supervised Recurrent Convolutional Neural Networks for Visual Object Tracking arXiv Paper ...
- 论文笔记系列-Auto-DeepLab:Hierarchical Neural Architecture Search for Semantic Image Segmentation
Pytorch实现代码:https://github.com/MenghaoGuo/AutoDeeplab 创新点 cell-level and network-level search 以往的NAS ...
随机推荐
- 最新版的Chrome不能设置网页编码怎么解?
添加一个Google插件https://chrome.google.com/webstore/detail/set-character-encoding/bpojelgakakmcfmjfilgdlm ...
- mysql winx64安装配置方法
1.mysql-5.7.21-winx64.zip解压到自己指定的路径 2.自己新建Data文件夹和my.ini文件 my.ini内容,直接复制修改路径即可 my.ini需要保存为ANSI格式 ,否 ...
- 微信小程序中显示与隐藏(hidden)
1.wx.wxml页面部分 <view bindtap='click'>点击</view> //这是显示隐藏的部分 <view hidden="{{hidden ...
- 严重: A child container failed during start的问题解决方法
找到tomcat中的server.xml中的文件, 将图中阴影的部分注释掉,即可.
- java awt 中文乱码 显示为 方块
今天调试同学的五子棋程序,同学的界面是用awt写的,运行的时候,发现菜单栏中的中文都无法正常显示,而是变为了一个个方框, 类似于这样:(图片来源于网络) 即使做了字体设置,比如设置为宋体,也还是无法正 ...
- 免费API 接口罗列,再也不愁没有服务器开发不了APP了(下)【申明:来源于网络】
免费API 接口罗列,再也不愁没有服务器开发不了APP了(下)[申明:来源于网络] 地址:http://mp.weixin.qq.com/s/QzZTIG-LHlGOrzfdvCVR1g
- 201621123049《java程序设计》第四周学习总结
1. 本周学习总结 1.1 写出你认为本周学习中比较重要的知识点关键词 继承 类型转换 覆盖 1.2 尝试使用思维导图将这些关键词组织起来.注:思维导图一般不需要出现过多的字. 2. 书面作业 1. ...
- HotSpot虚拟机
注:如其中有不懂的名词,下面有名词解释 1.对象的创建(限于普通Java对象,不包括数组和Class对象等) (1)检查这个指令的参数能否在常量池中定位到一个类的符号引用,并检查这个符号引用代表的类是 ...
- python------接口(get请求、post请求), 图片、歌曲下载,网页返回,上传文件
接口(get请求.post请求 --json), 图片.歌曲下载(context),网页返回(text),上传文件 import requests######################### ...
- ios安装ipa与安卓安装apk
ideviceinstaller -i .ipa包所在的路径 环境搭建:Mac上安装brew(brew里面有很多命令,可以安装自己想用的命令) 安装命令如下:curl -LsSf http://git ...