【深度学习】基于Pytorch的ResNet实现
1. ResNet理论
论文:https://arxiv.org/pdf/1512.03385.pdf
残差学习基本单元:

在ImageNet上的结果:
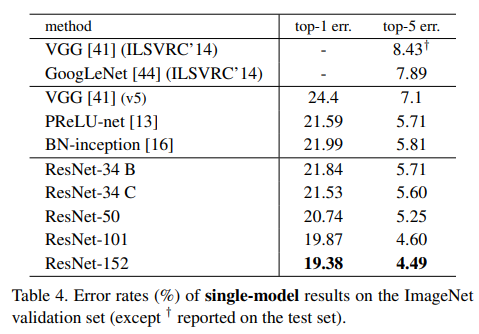
效果会随着模型层数的提升而下降,当更深的网络能够开始收敛时,就会出现降级问题:随着网络深度的增加,准确度变得饱和(这可能不足为奇),然后迅速降级。

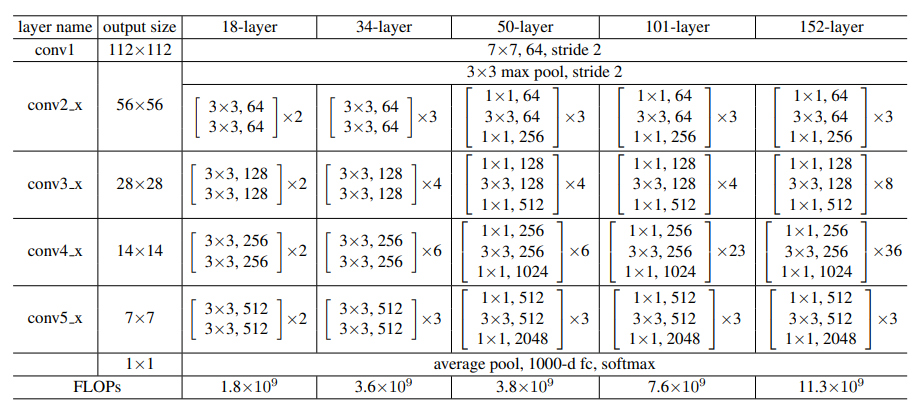
ResNet模型:
2. pytorch实现
2.1 基础卷积
conv3$\times\(3 和conv1\)\times$1 基础模块
def conv3x3(in_channel, out_channel, stride=1, groups=1, dilation=1):
return nn.Conv2d(in_channel, out_channel, kernel_size=3, stride=stride, padding=dilation, groups=groups, bias=False, dilation=dilation)
def conv1x1(in_channel, out_channel, stride=1):
return nn.Conv2d(in_channel, out_channel, kernel_size=1, bias=False)
参数解释:
in_channel: 输入的通道数目
out_channel:输出的通道数目
stride, padding: 步长和补0
dilation: 空洞卷积中的参数
groups: 从输入通道到输出通道的阻塞连接数
feature size 计算:
output = (intput - filter_size + 2 x padding) / stride + 1
空洞卷积实际卷积核大小:
K = K + (K-1)x(R-1)
K 是原始卷积核大小
R 是空洞卷积参数的空洞率(普通卷积为1)
2.2 模块
- resnet34
- _resnet
- ResNet
- _make_layer
- block
- Bottleneck
- BasicBlock
Bottlenect
class Bottleneck(nn.Module):
expansion = 4
__constants__ = ['downsample']
def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,
base_width=64, dilation=1, norm_layer=None):
super(Bottleneck, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
width = int(planes * (base_width / 64.)) * groups
# Both self.conv2 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv1x1(inplanes, width)
self.bn1 = norm_layer(width)
self.conv2 = conv3x3(width, width, stride, groups, dilation)
self.bn2 = norm_layer(width)
self.conv3 = conv1x1(width, planes * self.expansion)
self.bn3 = norm_layer(planes * self.expansion)
self.relu = nn.ReLU(inplace=True)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
out = self.relu(out)
out = self.conv3(out)
out = self.bn3(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
BasicBlock
class BasicBlock(nn.Module):
expansion = 1
__constants__ = ['downsample']
def __init__(self, inplanes, planes, stride=1, downsample=None, groups=1,
base_width=64, dilation=1, norm_layer=None):
super(BasicBlock, self).__init__()
if norm_layer is None:
norm_layer = nn.BatchNorm2d
if groups != 1 or base_width != 64:
raise ValueError('BasicBlock only supports groups=1 and base_width=64')
if dilation > 1:
raise NotImplementedError("Dilation > 1 not supported in BasicBlock")
# Both self.conv1 and self.downsample layers downsample the input when stride != 1
self.conv1 = conv3x3(inplanes, planes, stride)
self.bn1 = norm_layer(planes)
self.relu = nn.ReLU(inplace=True)
self.conv2 = conv3x3(planes, planes)
self.bn2 = norm_layer(planes)
self.downsample = downsample
self.stride = stride
def forward(self, x):
identity = x
out = self.conv1(x)
out = self.bn1(out)
out = self.relu(out)
out = self.conv2(out)
out = self.bn2(out)
if self.downsample is not None:
identity = self.downsample(x)
out += identity
out = self.relu(out)
return out
2.3 使用ResNet模块进行迁移学习
import torchvision.models as models
import torch.nn as nn
class RES18(nn.Module):
def __init__(self):
super(RES18, self).__init__()
self.num_cls = settings.MAX_CAPTCHA*settings.ALL_CHAR_SET_LEN
self.base = torchvision.models.resnet18(pretrained=False)
self.base.fc = nn.Linear(self.base.fc.in_features, self.num_cls)
def forward(self, x):
out = self.base(x)
return out
class RES34(nn.Module):
def __init__(self):
super(RES34, self).__init__()
self.num_cls = settings.MAX_CAPTCHA*settings.ALL_CHAR_SET_LEN
self.base = torchvision.models.resnet34(pretrained=False)
self.base.fc = nn.Linear(self.base.fc.in_features, self.num_cls)
def forward(self, x):
out = self.base(x)
return out
class RES50(nn.Module):
def __init__(self):
super(RES50, self).__init__()
self.num_cls = settings.MAX_CAPTCHA*settings.ALL_CHAR_SET_LEN
self.base = torchvision.models.resnet50(pretrained=False)
self.base.fc = nn.Linear(self.base.fc.in_features, self.num_cls)
def forward(self, x):
out = self.base(x)
return out
class RES101(nn.Module):
def __init__(self):
super(RES101, self).__init__()
self.num_cls = settings.MAX_CAPTCHA*settings.ALL_CHAR_SET_LEN
self.base = torchvision.models.resnet101(pretrained=False)
self.base.fc = nn.Linear(self.base.fc.in_features, self.num_cls)
def forward(self, x):
out = self.base(x)
return out
class RES152(nn.Module):
def __init__(self):
super(RES152, self).__init__()
self.num_cls = settings.MAX_CAPTCHA*settings.ALL_CHAR_SET_LEN
self.base = torchvision.models.resnet152(pretrained=False)
self.base.fc = nn.Linear(self.base.fc.in_features, self.num_cls)
def forward(self, x):
out = self.base(x)
return out
使用模块直接生成一个类即可,比如训练的时候:
cnn = RES101()
cnn.train() # 改为训练模式
prediction = cnn(img) #进行预测
目前先写这么多,看过了源码以后感觉写的很好,不仅仅有论文中最基础的部分,还有一些额外的功能,模块的组织也很整齐。
平时使用一般都进行迁移学习,使用的话可以把上述几个类中pretrained=False参数改为True.
实战篇:以上迁移学习代码来自我的一个小项目,验证码识别,地址:https://github.com/pprp/captcha_identify.torch
【深度学习】基于Pytorch的ResNet实现的更多相关文章
- 深度学习之PyTorch实战(1)——基础学习及搭建环境
最近在学习PyTorch框架,买了一本<深度学习之PyTorch实战计算机视觉>,从学习开始,小编会整理学习笔记,并博客记录,希望自己好好学完这本书,最后能熟练应用此框架. PyTorch ...
- 对比学习:《深度学习之Pytorch》《PyTorch深度学习实战》+代码
PyTorch是一个基于Python的深度学习平台,该平台简单易用上手快,从计算机视觉.自然语言处理再到强化学习,PyTorch的功能强大,支持PyTorch的工具包有用于自然语言处理的Allen N ...
- 参考《深度学习之PyTorch实战计算机视觉》PDF
计算机视觉.自然语言处理和语音识别是目前深度学习领域很热门的三大应用方向. 计算机视觉学习,推荐阅读<深度学习之PyTorch实战计算机视觉>.学到人工智能的基础概念及Python 编程技 ...
- 《深度学习框架PyTorch:入门与实践》的Loss函数构建代码运行问题
在学习陈云的教程<深度学习框架PyTorch:入门与实践>的损失函数构建时代码如下: 可我运行如下代码: output = net(input) target = Variable(t.a ...
- 深度学习|基于LSTM网络的黄金期货价格预测--转载
深度学习|基于LSTM网络的黄金期货价格预测 前些天看到一位大佬的深度学习的推文,内容很适用于实战,争得原作者转载同意后,转发给大家.之后会介绍LSTM的理论知识. 我把code先放在我github上 ...
- Facebook 发布深度学习工具包 PyTorch Hub,让论文复现变得更容易
近日,PyTorch 社区发布了一个深度学习工具包 PyTorchHub, 帮助机器学习工作者更快实现重要论文的复现工作.PyTorchHub 由一个预训练模型仓库组成,专门用于提高研究工作的复现性以 ...
- 【新生学习】深度学习与 PyTorch 实战课程大纲
各位20级新同学好,我安排的课程没有教材,只有一些视频.论文和代码.大家可以看看大纲,感兴趣的同学参加即可.因为是第一次开课,大纲和进度会随时调整,同学们可以随时关注.初步计划每周两章,一个半月完成课 ...
- 基于pytorch实现Resnet对本地数据集的训练
本文是使用pycharm下的pytorch框架编写一个训练本地数据集的Resnet深度学习模型,其一共有两百行代码左右,分成mian.py.network.py.dataset.py以及train.p ...
- 深度学习框架PyTorch一书的学习-第六章-实战指南
参考:https://github.com/chenyuntc/pytorch-book/tree/v1.0/chapter6-实战指南 希望大家直接到上面的网址去查看代码,下面是本人的笔记 将上面地 ...
- 深度学习框架PyTorch一书的学习-第五章-常用工具模块
https://github.com/chenyuntc/pytorch-book/blob/v1.0/chapter5-常用工具/chapter5.ipynb 希望大家直接到上面的网址去查看代码,下 ...
随机推荐
- Can't accept UDP connections java.net.BindException: Address already in use_解决方案
一.问题描述 在Linux服务器(CentOS7系统)中配置并启动JMeter远程监控服务器资源所需的ServerAgent目录下的 startAgent.sh 文件时,系统出现异常提示,如下: [r ...
- Swift4.0复习访问控制与作用域
1.访问等级: open: 可以继承,可以重写. public: “public 访问等级能用于修饰所有文件作用域的函数.对象.协议.枚举.结构体.类以及各种类型中的属性与方法.用 public 所修 ...
- HTML布局排版5 测试某段html页面1
除了div,常见的还有用table布局,这里直接用前面博文的页头页尾,如下面的页面的部分,是个简单的table.该页面样式,如果拖动浏览器,可以看到table和文本框总是居中,但是文本框下方那两个按钮 ...
- 07点睛Spring MVC4.1-ContentNegotiatingViewResolver
转发地址:https://www.iteye.com/blog/wiselyman-2214965 7.1 ContentNegotiatingViewResolver ContentNegotiat ...
- .Net Core 2.2 项目部署到IIS
1.安装IIS所需的Host扩展 从官网(https://dotnet.microsoft.com/download/dotnet-core/2.2)下载对应的.net core版本的Runtime ...
- Ehcache配置文件ehcache.xml
<?xml version="1.0" encoding="UTF-8"?> <ehcache xmlns:xsi="http:// ...
- 任务调度之Quartz.Net可视化界面
上一篇关于任务调度Quartz.Net的文章中介绍了其三个核心对象IScheduler.IJob和ITrigger,我们已经知道了其基本的使用方法,可以在控制台当中运行监控.但是在实际中我们往往需要有 ...
- Google BERT
概述 BERT的全称是Bidirectional Encoder Representation from Transformers,即双向Transformer的Encoder,因为decoder是不 ...
- poj1228(稳定凸包+特判最后一条边)
题目链接:https://vjudge.net/problem/POJ-1228 题意:我是真的没看懂题意QAQ...搜了才知道.题目给了n个点,问这n个点确定的凸包是否能通过添加点来变成一个新的凸包 ...
- pandas之时间序列笔记
时间戳tiimestamp:固定的时刻->pd.Timestamp 固定时期period:比如2016年3月份,再如2015年销售额->pd.Period 时间间隔interval:由起始 ...