松灵机器人scout mini小车 自主导航(2)——仿真指南
松灵机器人Scout mini小车仿真指南
之前介绍了如何通过CAN TO USB串口实现用键盘控制小车移动。但是一直用小车测试缺乏安全性。而松灵官方贴心的为我们准备了gazebo仿真环境,提供了完整的仿真支持库,本文将介绍如何上手使用仿真。
官方仓库地址:https://github.com/agilexrobotics/ugv_gazebo_sim
1.仿真环境准备
整个功能包介绍
├── scout_control :该文件夹是小车仿真控制器功能包
├── scout_description :该文件夹是模型文件功能包
└── scout_gazebo_sim :该文件夹是gazebo模拟功能包
安装相关功能包依赖
所采用的开发环境是Ubuntu18.04+ROS Melodic
下载所需要的功能包
sudo apt-get install ros-melodic-ros-control
sudo apt-get install ros-melodic-ros-controllers
sudo apt-get install ros-melodic-gazebo-ros
sudo apt-get install ros-melodic-gazebo-ros-control
sudo apt-get install ros-melodic-joint-state-publisher-gui
sudo apt-get install ros-melodic-teleop-twist-keyboard
新建工作空间并初始化
打开一个新终端,创建一个名为scout_ws的工作区,并初始化:
mkdir -p scout_ws/src
cd scout_ws/src
catkin_init_workspace
下载对应的仿真模型功能包。本文采用的是scout mini。需要将https://github.com/agilexrobotics/ugv_gazebo_sim/tree/master/scout下的三个文件复制到src目录中
git clone https://github.com/agilexrobotics/ugv_gazebo_sim/tree/master/scout
正常编译
cd ..
rosdep install --from-paths src --ignore-src -r -y
caktin_make
2.仿真小车验证
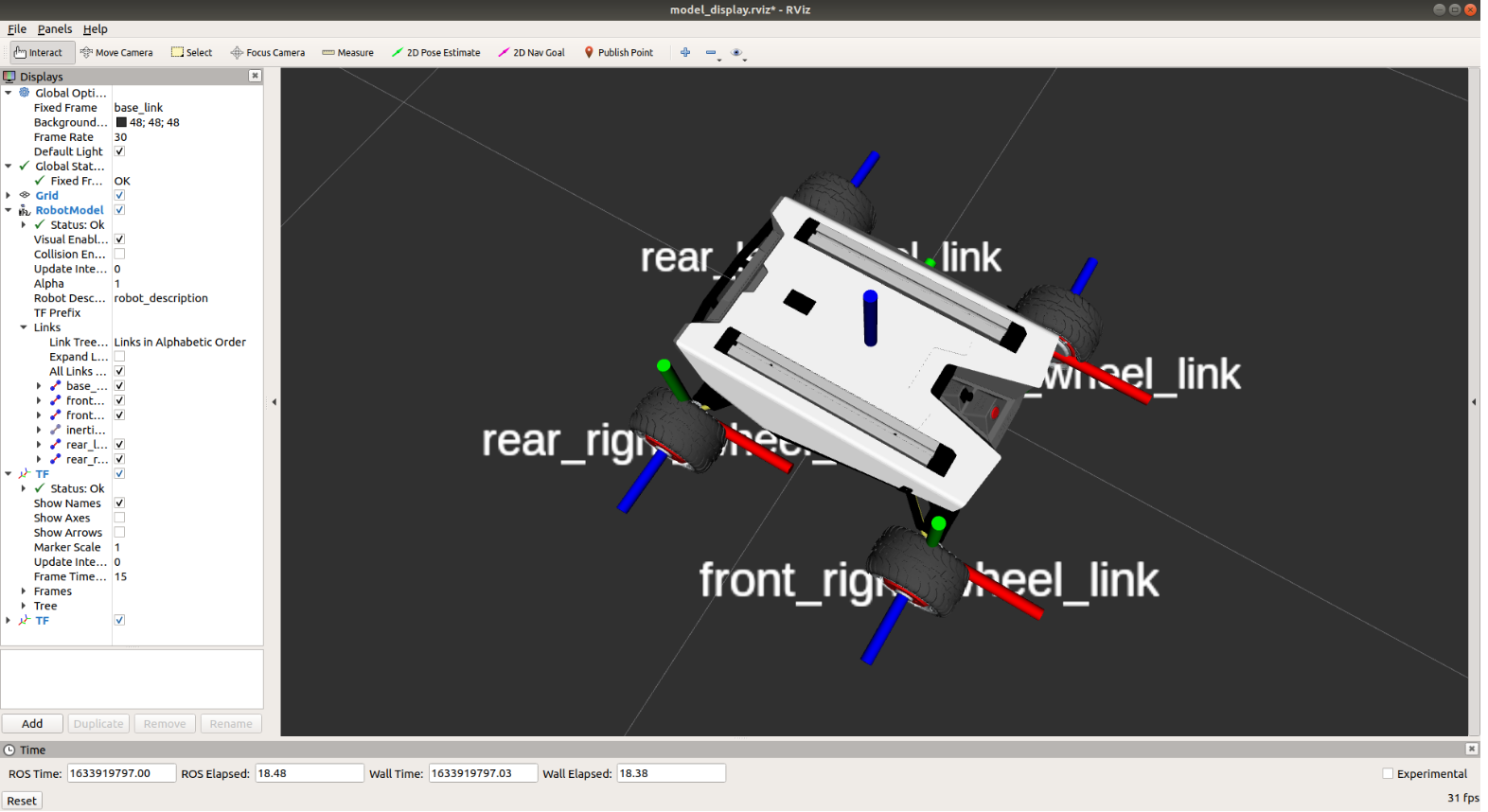
进入scout_ws工作空间,运行系列车仿真模型,display_xxxx.launch 为不同车型在rviz仿真展示。scout_xxxx.launch为不同车型在gazebo模拟环境中展示。
source devel/setup.bash
roslaunch scout_description display_scout_mini.launch
source devel/setup.bash
roslaunch scout_gazebo_sim scout_empty_world.launch

如果想使用playgen地图,需要提取补全gazebo里面的models文件,不然会一直黑屏
3.添加自定义传感器
官方给定的只有小车底座,没有现成的传感器。在实际使用过程中,可以自定义一系列传感器。
scout系列车型的urdf描述文件位于scout_description/urdf中,在使用过程中,并未直接使用urdf进行描述,而是从xacro(xml xacro)描述文件中生成urdf信息。便于我们像编程一样复用urdf节点以及相关拆分组件等功能。
如果不了解xacro 可以参考xacro语法说明: http://wiki.ros.org/xarc
自定义简易摄像头
首先在scout_description/urdf中添加一个名为universal_sensor_adder.xacro的文件,其中保存内容如下:
<?xml version="1.0"?>
<!--
Author: AnthonySuen
Date: 2020-4-8
-->
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="universal_sensor_adder">
<!-- 用于生成一个新的传感器节点,
x_offset y_offset z_offset r p y对应于传感器和 base_link 的相对位置
sensor_config 为传感器的配置信息
sensor_plugin_config 为 gazebo 相关插件的配置内容 -->
<xacro:macro name="add_sensor" params="sensor_name type x_offset y_offset z_offset r p y **sensor_config **sensor_plugin_config">
<link name="sensor_${sensor_name}">
<!-- 配置传感器视觉信息 -->
<visual>
<geometry>
<box size="0.03 0.05 0.05"/>
</geometry>
<material name="red">
<color rgba="1.0 0.0 0.0 1.0"/>
</material>
</visual>
<!-- 配置碰撞体积, 为gazebo仿真使用 -->
<collision>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<geometry>
<box size="0.03 0.05 0.05"/>
</geometry>
</collision>
<!-- 配置惯性矩阵, 用于 gazebo 仿真,这里我假设传感器很轻很小 -->
<inertial>
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0"/>
<mass value="1e-5"/>
<inertia ixx="1e-6" ixy="1e-6" ixz="1e-6" iyy="1e-6" iyz="1e-6" izz="1e-6"/>
</inertial>
</link>
<!-- 配置关节信息, 这里我默认传感器是固定在车上的 -->
<joint name="sensor_${sensor_name}_joint" type="fixed">
<parent link="base_link"/>
<child link="sensor_${sensor_name}"/>
<origin xyz="${x_offset} ${y_offset} ${z_offset}" rpy="${r} ${p} ${y}"/>
</joint>
<!-- gazebo 配置仿真配置部分 -->
<gazebo reference="sensor_${sensor_name}"> <!-- 此部分要与 传感器 link 名称保持一致 -->
<sensor name="${sensor_name}" type="${type}">
<!-- 这里会插入传感器自身配置信息和相关插件的配置内容 -->
<xacro:insert_block name="sensor_config"/>
<xacro:insert_block name="sensor_plugin_config"/>
</sensor>
</gazebo>
</xacro:macro>
</robot>
在使用过程中删除中文注释,xacro无法解析非ascii 字符!
编辑empty.urdf文件,修改内容如下:
<?xml version="1.0"?>
<!--
Author: AnthonySuen
Date: 2020-4-8
-->
<robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="sensors">
<!-- 加载我们之前编写的文件,之后可以使用其中相关内容 -->
<xacro:include filename="$(find scout_description)/urdf/universal_sensor_adder.xacro" />
<!-- 使用我们编写的函数,填入相关参数 -->
<xacro:add_sensor sensor_name="camera" type="camera" x_offset="0.1" y_offset="0.0" z_offset="0.085" r="0.0" p="0.0" y="0.0">
<!-- 这部分会替换 <xacro:insert_block name="sensor_config"/> 中的内容 -->
<sensor_config>
<update_rate>30</update_rate>
<camera name="general_camera">
<image width="640" height="480" hfov="1.5708" format="RGB8" near="0.01" far="50.0"/>
</camera>
</sensor_config>
<!-- 这部分会替换 <xacro:insert_block name="sensor_plugin_config"/> 中的内容 -->
<sensor_plugin_config>
<plugin name="general_camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>36.0</updateRate>
<cameraName>sensor_camera</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>sensor_camera</frameName> <!-- 需要与 传感器 link 名称保持一致 -->
<hackBaseline>0.1</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor_plugin_config>
</xacro:add_sensor>
</robot>
在使用过程中删除中文注释,xacro无法解析非ascii 字符!
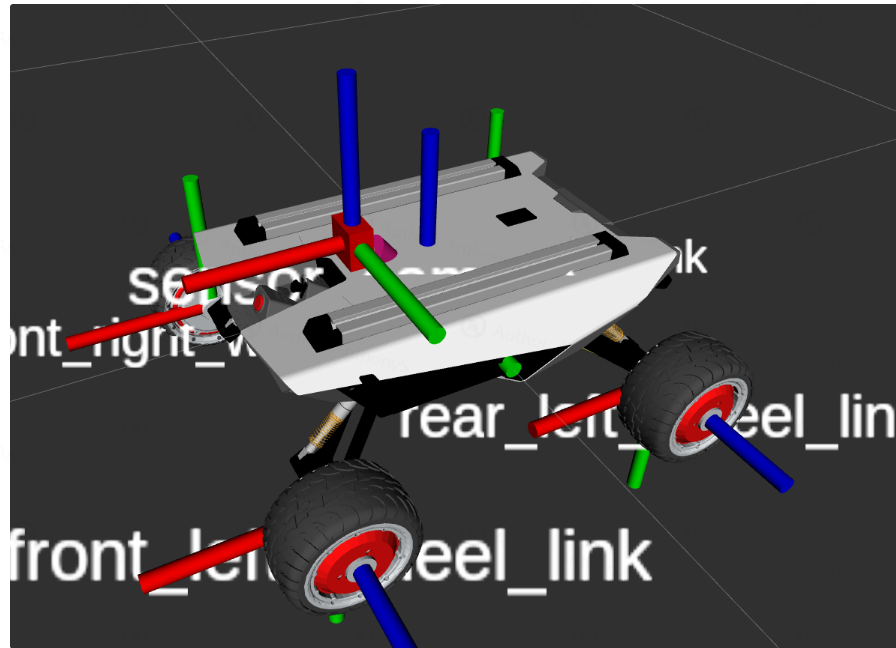
之后再运行RIVZ查看修改后的模型
roslaunch scout_description display_mini_models.launch
松灵机器人scout mini小车 自主导航(2)——仿真指南的更多相关文章
- QT--图灵机器人
QT--图灵机器人 1.登陆图灵机器人官网注册一个图灵机器人 2.获取apikey 3.pro文件添加 QT += core gui network 4.头文件 #include < ...
- weiphp---------图灵机器人存在的bug。
1.很多人下载下来weiphp源码以后,配置好了图灵机器人却不能使用.原因是因为他源码里面存在一个小bug 上图红色框框内是他的源码,问题就出在这里. 修改方法: if($result ['code' ...
- ROS::message_filters中的一个报错(mt::TimeStamp……)
『方便检索』 ros::Time msg_time = mt::TimeStamp<typename mpl::at_c<Messages, i>::type>::value( ...
- 机器人与机器人仿真技术(zz)
http://www.viblue.com/archives/5587.htm 一.机器人简介: 机器人(Robot)是自动执行工作的机器装置.它既可以接受人类指挥,又可以运行预先编排的程序,也可以根 ...
- Android智能聊天机器人
http://www.tuling123.com/ 注册一个账号,申请一个KEY值.此网站也有文档,可以查看. package com.tulingdemo; import java.te ...
- ROS机器人程序设计(原书第2版)补充资料 (玖) 第九章 导航功能包集进阶 navigation
ROS机器人程序设计(原书第2版)补充资料 (玖) 第九章 导航功能包集进阶 navigation 书中,大部分出现hydro的地方,直接替换为indigo或jade或kinetic,即可在对应版本中 ...
- ROS探索总结(十七)——构建完整的机器人应用系统
上一篇博客介绍了HRMRP机器人平台的设计,基于该平台,可以完成丰富的机器人应用,以较为典型的机器人导航为例,如何使用HRMRP来完成相应的功能?本篇博客将详细介绍如何将HRMRP应用到 ...
- Adobe Scout 使用参考说明
Adobe Scout 用于优化 Flash 内容,是一款极为强大的工具,因为它能让您看到 Flash Player 幕后正在发生的事情.但是若明白 Flash Player 为什么做这些事情,您看到 ...
- 机器人操作系统(ROS)在线实训平台学习实验指南
机器人操作系统(ROS)在线学习指南 在高校开设ROS相关课程已经积累了一年多的经验,由于自动化类专业在课程安排中不同于计算机相关专业,通常没有Linux相关的课程基础,直接上手ROS较为 ...
- java最简单的方式实现httpget和httppost请求
java实现httpget和httppost请求的方式多种多样,个人总结了一种最简单的方式,仅仅需几行代码,就能够完美的实现. 此处须要用到两个jar包,httpclient-4.3.1.jar.ht ...
随机推荐
- 80x86汇编—分支循环程序设计
文章目录 查表法: 实现16进制数转ASCII码显示 计算AX的绝对值 判断有无实根 地址表形成多分支 从100,99,...,2,1倒序累加 输入一个字符,然后输出它的二进制数 大小写转换 大写转小 ...
- C语言:如何删除在可视化网页中未可见的内容(网页txt)
我这个代码仅仅限制于在chrome浏览器中下载china daliy的网页中实现删除可视化内容,因为每个网页的超链接或者文本主内容分布不一样,但是学会了删除一个网页类型的不可视化内容之后,修改其他网页 ...
- java学习之旅(day.08)
类与对象的关系 类是一种抽象的数据类型,是对某一类事物的描述,但并不代表具体的事物,如动物与狗的关系,类描述的是某一类事物具备的共同特点 对象是抽象概念的具体实例 能够展现出功能,体现出特点的是具体的 ...
- 基于AIRIOT平台构建低成本、更聪明的智能环卫系统,让管理更加高效智能
环卫工程作为城市基础设施保障,是城市建设管理中不可或缺的重要组成部分.随着城市进程的加快及技术的进步,环卫工程管理也在逐渐向精细化.智能化.绿色化等趋势发展. 智能环卫依托物联网.AI.大数据等技术, ...
- CentOS7配置NFS服务并设置客户端自动挂载
在CentOS7中配置NFS服务并设置客户端自动挂载的步骤如下: NFS服务端配置 安装NFS服务: 首先,你需要在CentOS 7服务器上安装NFS服务.你可以使用yum命令来安装: yum ins ...
- windows下载安装ipopt求解器 可用于pyomo调用
方案一:采用官方编译的应用程序 官方对windows下有已经编译好的应用程序,只需要下载下来,并将ipopt的应用程序所在文件夹路径添加到系统全局环境变量就可以了.这样在利用pyomo或者其他建模工具 ...
- JVM面试篇(下)
垃圾收集器 简述 Java 垃圾回收机制 在 java 中,程序员是不需要显示的去释放一个对象的内存的,而是由虚拟机自行执行.在 JVM 中,有一个垃圾回收线程,它是低优先级的,在正常情况下是不会执行 ...
- kettle从入门到精通 第六十六课 ETL之kettle kettle阻塞教程,轻松获取最后一行数据,so easy
场景:ETL沟通交流群内有小伙伴反馈,如何在同步一批数据完成之后记录下同步结果呢?或者是调用后续步骤.存储过程.三方接口等. 解决:使用步骤Blocking step进行阻塞处理即可. 1.下面的de ...
- 私密信息管理工具 Vault 快速入门
什么是 Vault Vault 是一个基于身份的秘密和加密管理系统.秘密是您想要严格控制访问的任何内容,例如 API 加密密钥.密码和证书. Vault 提供由身份验证和授权方法控制的加密服务.使用 ...
- 【 INFINI Workshop 上海站】7 月 27 日一起动手实验玩转 Easysearch
[ INFINI Workshop 上海站]7 月 27 日下午 和 INFINI Labs 的技术专家面对面,第一时间了解极限实验室的发布最新产品和功能特性,通过动手实战,快速掌握最前沿的搜索技术, ...