INTRODUCE OF REPRESENTATIVE CPG-CONTROLLED ROBOTS
仿生机器人研究是非常有意思的领域,它不仅从自然界中获取灵感,它也为一些生物的研究提供一个手段和基础,正如下图中所展示的。不论人工智能发展的如何迅速,机械结构始终做为着一个承载的平台,其重要性不可忽略。

(Auke Jan Ijspeert gives a talk on Animal Locomotion - Learning from Robots at WORLDS.MINDS MOBILITY)
仿生机器人有结构仿生,上图不难看出,但也有着仿生控制方法,相比于广泛存在基于模型,和基于行为的控制方法,它不需要进行复杂的数学计算和分析,方法相对简单,但是要想用于实际的工程中,需要结合生物运动资料或者优化算法来确定控制的参数。在这里主要介绍下生物控制方法(此处指中枢模式发生器,CPG)在机器人中的运用。
Auke Jan的实验室进行了许多CPG的实践,下图是一个很好的展示,在动物的行走控制中,控制网络主要包括三部分,即高层中枢系统(对应下图的Descending modulation)、低级中枢系统(Central pattern generators)以及信息反馈模块(Reflexes)。
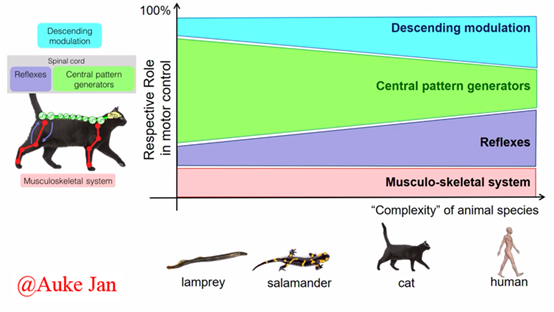
(Auke Jan Ijspeert gives a talk on Animal Locomotion - Learning from Robots at WORLDS.MINDS MOBILITY)
高层中枢系统提供控制节律运动起始的信号并对整个运动过程进行监控,特别是动物在复杂环境中运动,高层中枢的调控作用更为突出。行走控制网络的前向通道以脊椎动物的脊髓(CPG)为中心控制单元,产生控制肌肉收缩的舒张的基本节律控制信号。CPG具有独立于神经中枢和外围传入、自激产生运动控制信号的特性,而CPG控制网络要复杂、稳定的运动控制信号,高层中枢系统和反馈信息的实时调控是必不可少的。
动物实现行走的关键在于神经系统对"肌肉-骨骼"系统的精确控制,"肌肉-骨骼"系统是动物躯体运动及姿态实现的物质基础,运动神经元网络与之相连,传递脊髓的运动控制信号。下图可以看到,在拥有更多运动行为的人类身体中,其CPG网络也更加复杂,这在以后介绍。
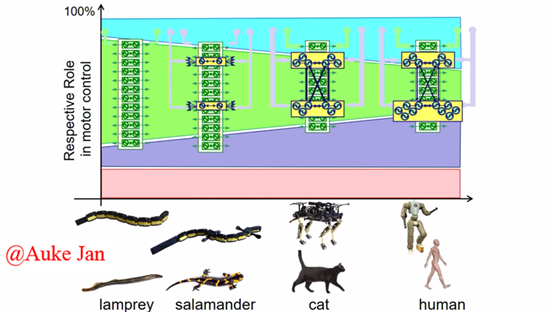
(Auke Jan Ijspeert gives a talk on Animal Locomotion - Learning from Robots at WORLDS.MINDS MOBILITY)
在14年的文献综述中也对机器人进行了总结,将其中一张图截出以作展示。(Yu J , Tan M , Chen J , et al. A Survey on CPG-Inspired Control Models and System Implementation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(3):441-456.)
The bioinspired CPG control has proven to be successful in diverse robotic applications, including legged robots (e.g., biped/humanoid, quadruped, hexapod, octopod, and reconfigurable), crawling robots (e.g., snake-like and salamander-like), swimming robots (anguilliform, carangiform, ostraciiform, undulatory dorsal or pelvic fins, dolphin-like, flapping fins, and amphibious), flying robots (i.e., flapping flight),climbing robots (e.g., caterpillar), and other rhythmic motions(e.g., robot arm, neuro prosthesis, robotic marionette, and industrial robots). Note that the rhythmic movements are not applicable to wheeled and tracked locomotion. (Yu J , Tan M , Chen J , et al. A Survey on CPG-Inspired Control Models and System Implementation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2014, 25(3):441-456.)
做以上简单总结,以供后来之思。
INTRODUCE OF REPRESENTATIVE CPG-CONTROLLED ROBOTS的更多相关文章
- ural1553 Caves and Tunnels
Caves and Tunnels Time limit: 3.0 secondMemory limit: 64 MB After landing on Mars surface, scientist ...
- URAL 题目1553. Caves and Tunnels(Link Cut Tree 改动点权,求两点之间最大)
1553. Caves and Tunnels Time limit: 3.0 second Memory limit: 64 MB After landing on Mars surface, sc ...
- WPF Wonders: Transformations (and Robots!)
indows Presentation Framework (WPF) gets a lot of mileage out of being layered on top of DirectX, in ...
- 泡泡一分钟:Teaching Robots to Draw
Teaching Robots to Draw 教会机器人画画https://h2r.cs.brown.edu/wp-content/uploads/kotani19.pdf Atsunobu Kot ...
- 网站 robots.txt 文件编写
网站 robots.txt 文件编写 Intro robots.txt 是网站根目录下的一个纯文本文件,在这个文件中网站管理者可以声明该网站中不想被robots访问的部分,或者指定搜索引擎只收录指定的 ...
- Robots.txt - 禁止爬虫(转)
Robots.txt - 禁止爬虫 robots.txt用于禁止网络爬虫访问网站指定目录.robots.txt的格式采用面向行的语法:空行.注释行(以#打头).规则行.规则行的格式为:Field: v ...
- (转载)robots.txt写法大全和robots.txt语法的作用
1如果允许所有搜索引擎访问网站的所有部分的话 我们可以建立一个空白的文本文档,命名为robots.txt放在网站的根目录下即可.robots.txt写法如下:User-agent: *Disallow ...
- 2016 ccpc 网络选拔赛 F. Robots
Robots Time Limit: 2000/1000 MS (Java/Others) Memory Limit: 65536/65536 K (Java/Others)Total Subm ...
- robots.txt文件没错,为何总提示封禁
大家好,我的robots.txt文件没错,为何百度总提示封禁,哪位高人帮我看看原因,在此谢过. 我的站点www.haokda.com,robots.txt如下: ## robots.txt for P ...
随机推荐
- Linux系统安装Docker
1.安装Linux系统 2.查看centos内核版本.Docker要求centos的内核版本必须高于3.10.使用命令:uname -r 查看内核版本.如果低于3.10,使用命令:yum update ...
- AtomicReference
public class AtomicReference<V> implements java.io.Serializable { private static final long se ...
- springboot整合JPA(简单整理,待续---)
整合步骤 引入依赖: <dependencies> <dependency> <groupId>org.springframework.boot</group ...
- 一步步学会用docker部署应用(nodejs版)
一步步学会用docker部署应用 docker是一种虚拟化技术,可以在内核层隔离资源.因此对于上层应用而言,采用docker技术可以达到类似于虚拟机的沙盒环境.这大大简化了应用部署,让运维人员无需陷入 ...
- 立即执行函数(自执行函数) IIFE
// 最常用的两种写法 (function(){ /* code */ }()); // 老道推荐写法 (function(){ /* code */ })(); // 当然这种也可以 // 括号和J ...
- ADO.Net的发展史
1.演变历史: 它们是按照这个时间先后的顺序逐步出现的,史前->ODBC->OLEDB->ADO->ADO.Net. 2.下面分别介绍一下这几个. a. 史前的数据访问是什么样 ...
- AutoCAD设置透明度后不起效果
在AutoCAD中设置了实体的透明度,但是看到的效果是不透明 解决方法: 设置系统变量TRANSPARENCYDISPLAY
- Java 问题定位工具 -- jps
概览 最近老大布置的任务就是质量加固,偶然看到了一些对于 Java 性能分析的介绍,因此,有了此篇学习笔记. JDK本身提供了很多方便的JVM性能调优监控工具,除了集成式的VisualVM和jCons ...
- JS高程12.2.3元素大小的学习笔记
<JavaScript高级程序设计>中讲述了通过JS如何控制页面中元素的大小,其中涉及到三对属性:偏移量,客户区大小,滚动大小.以前自己经常看到这三对属性,但是具体不是很清楚,容易混淆.所 ...
- ip xfrm命令是做什么的?
答: 设置xfrm.xfrm(transform configuration)是一个IP框架,用来转换数据包的格式,也就是使用算法来加密数据包,该框架用作IPsec协议的一部分 ip xfrm sta ...