Ubuntu14.04 使用本地摄像头跑ORB SLAM2(暂未完成)
嗯 这个方法我暂时弄不出来,用了另外一个方法:SLAM14讲 第一次课 使用摄像头或视频运行 ORB-SLAM2
前面的准备:
STEP1:第一个终端
roscore
STEP2:第二个终端运行usb_cam (如果出现问题见上面的第二个参考,里面有两种方法启动摄像头)
roslaunch usb_cam usb_cam-test.launch
STEP3:第三个终端
source Examples/ROS/ORB_SLAM2/build/devel/setup.bash (路径看自己的ORB_SLAM2文件,如果没有这一步会有错误:[rospack] Error: package 'ORB_SLAM2' not found)
rosrun ORB_SLAM2 Mono /home/zc/Desktop/ORBvoc.txt /home/zc/Desktop/Asus.yaml
我把
./Vocabulary/ORBvoc.txt
/home/zc/Desktop/ORB_SLAM2/Examples/ROS/ORB_SLAM2/Asus.yaml(此处还没有标定,后续要做)
这两个文件都拷贝到桌面上去了,如果直接运行一直有问题。
运行后出现问题:
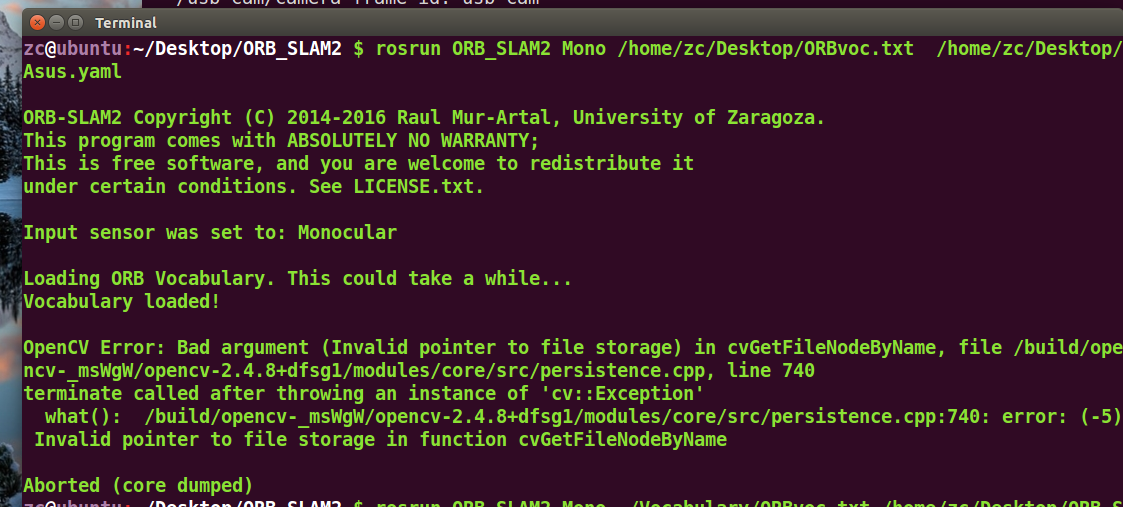
尝试解决问题:
OpenCV Error: Bad argument (Invalid pointer to file storage) in cvGetFileNodeByName, file /build/opencv-_msWgW/opencv-2.4.8+dfsg1/modules/core/src/persistence.cpp, line 740
terminate called after throwing an instance of 'cv::Exception'
what(): /build/opencv-_msWgW/opencv-2.4.8+dfsg1/modules/core/src/persistence.cpp:740: error: (-5) Invalid pointer to file storage in function cvGetFileNodeByName
问题原因:

查阅资料发现是OpenCV3与ROS兼容问题,因为indigo里面自带的是opencv2.4.8,而我要用的程序是基于opencv3的。(这里因为之前跟着SLAM14讲在做)
解决方法:在程序所在工作空间中加入最新的cv_bridge包,重新catkin-make,这样就可以解决该问题了。
cv_bridge包
链接:https://pan.baidu.com/s/1CsCfjrIUyepNqxKhECIsyQ
提取码:n1rm
有可能出现catkin_make:commond not found 的错误,使用这个解决方法
Ubuntu14.04 使用本地摄像头跑ORB SLAM2(暂未完成)的更多相关文章
- ubuntu14.04使用reaver跑pin码
今天刚说过没找到支持ubuntu14.04用reaver跑pin的旧版库文件这就有摸索到方法了... 另外安装系统ubuntu14.04以及一系列破解工具比如aircrack,minidwep等都不在 ...
- ORB SLAM2在Ubuntu 16.04上的运行配置
http://www.mamicode.com/info-detail-1773781.html 安装依赖 安装OpenGL 1. 安装opengl Library$sudo apt-get inst ...
- ubuntu14.04 dnsmasq搭建本地名字服务器
1 修改dnsmasq配置文件/etc/dnsmasq.conf 在/etc/dnsmasq.conf文件底部增加 #++++++++++++++++++++++++++++++++++++++++ ...
- orb slam2 双目摄像头
主要参考了http://blog.csdn.net/awww797877/article/details/51171099这篇文章,其中需要添加的是:export ROS_PACKAGE_PATH=$ ...
- Ubuntu14.04(indigo)实现RGBDSLAMv2(数据集和实时Kinect)
Ubuntu14.04(indigo)实现RGBDSLAMv2(数据集和实时Kinect v2) 一.在.bag数据集上跑RGBDSLAMv2 RGBDSLAMv2指的是Felix Endres大神在 ...
- Caffe搭建:Ubuntu14.04 + CUDA7.0 + opencv3.0 + Matlab2014A
从Hinton在science上发表深度学习训练开创新的文章以来,深度学习火了整整有3年多,而且随着新的硬件和算法的提出,深度学习正在应用于越来越多的领域,发挥其算法的优势. 实验室并没有赶上第一波深 ...
- Ubuntu14.04 64bit下Caffe + CUDA 6.5安装详细步骤
不多说,直接上干货! 笔者花了很长时间才装完,主要是cuda安装和opencv安装比较费劲,cuda找不到32位的安装包只好重装64位的ubuntu系统,opencv 也是尝试了很久才解决,这里建议用 ...
- Ubuntu14.04 dd命令克隆系统镜像安装到另一台机器上
linux系统如果想做备份还原,使用ghost的时候经常出现问题,后来发现可以直接使用dd命令完成硬盘的克隆和还原.当拷贝完硬盘后,就可以拿这个硬盘放到其它设备上跑了.也就是完成了“烧写”了. 用U盘 ...
- Ubuntu14.04配置Mono+Jexus
总所周知,ASP.NET是微软公司的一项技术,是一个网站服务端开发的一种技术,它可以在通过HTTP请求文档时再在Web服务器上动态创建它们,就是所谓动态网站开发,它依赖运行于 IIS 之中的程序 .但 ...
随机推荐
- vs2017cpu占用过高解决方案
最近在开发中,发现机器变得很卡顿.查看资源管理器发现vs的cpu使用率一直在20%-40%之间.占据了大量的系统计算资源. 展开资源管理器发现有很多node的线程,杀死后,他们又会自己起来! 一翻搜索 ...
- div嵌套,常见左右分类栏目
最终效果图如下: html代码如下: <div class="smalItem"> <div class="leftnav"> < ...
- Linux下MySQL在知道密码的情况下修改密码
1.在知道原密码的情况下,进入MySQL: mysql -u root -p 2.进入 mysql数据库,然后通过语句修改密码: 我的MySQL版本是:mysql Ver 14.14 Distrib ...
- EOS wallet API 报HTTP 400错误
服务器:192.168.8.144 按照官方的docker方式运行的,因为keosd(钱包)开出来的API只容许本地访问,即: url --request POST --header 'Host: 0 ...
- jmeter脚本录制与性能指标分析
一.浏览器代理设置(猎豹) 1.打开猎豹浏览器,进行如下图操作 2.点击局域网设置 3.输入如下信息,注意端口不要重复 4.输入网址www.baidu.com,不能正常访问就是正确的 5.查看添加的端 ...
- Lucene分词详解
分词和查询都是以词项为基本单位,词项是词条化的结果.在Lucene中分词主要依靠Analyzer类解析实现.Analyzer类是一个抽象类,分词的具体规则是由子类实现的,所以对于不同的语言规则,要有不 ...
- PHP数据库连接mysql与mysqli的区别与用法
一.mysql与mysqli的概念相关: 1.mysql与mysqli都是php方面的函数集,与mysql数据库关联不大. 2.在php5版本之前,一般是用php的mysql函数去驱动mysql数据库 ...
- AX3298添加新sensor
这是编译的工程目录. 1,先把sensor对应的驱动比如GC1034.c添加到工程.然后编译成库.会在res目录下生产sensor.bin文件 流程:编译后在debug目录生成 elf 文件AX329 ...
- 关于python的创立模块和导入
首先,模块就是所有的.py文件,而模块的作用便是简化代码,使其看得简易. 例如这就是模块: 'a test'这是注释,并没有什么作用. 而创立模块的第一步:建立一个.py文件例如:这是上方这串代码的模 ...
- rapid7/metasploitable3 CTF摘要
rapid7/metasploitable3 俗话说,没图说个JB.我专门做了个图以供欣赏,做图技术可能有点糙,见谅见谅. 2016年11月,rapid7发布了metasploitable3,以后简称 ...