SLAM+语音机器人DIY系列:(三)感知与大脑——4.音响麦克风与摄像头
摘要
在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话。朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人。实现的关键是让机器人能通过传感器感知周围环境,并通过机器人大脑处理并输出反馈和执行动作。本章节涉及到的传感器有激光雷达、IMU、轮式里程计、麦克风、音响、摄像头,和用于处理信息的嵌入式主板。关于传感器的ROS驱动程序开发和在机器人上的使用在后面的章节会展开,本章节重点对机器人传感器和嵌入式主板进行讲解,主要内容:
4.音响麦克风与摄像头
要让机器人能跟人进行对话,需要麦克风和音响。其实麦克风就相当于机器人的耳朵,音响就相当于机器人的嘴巴。摄像头作为机器人的眼睛,摄像头可以用来帮助机器人定位或认识环境。
4.1.音响
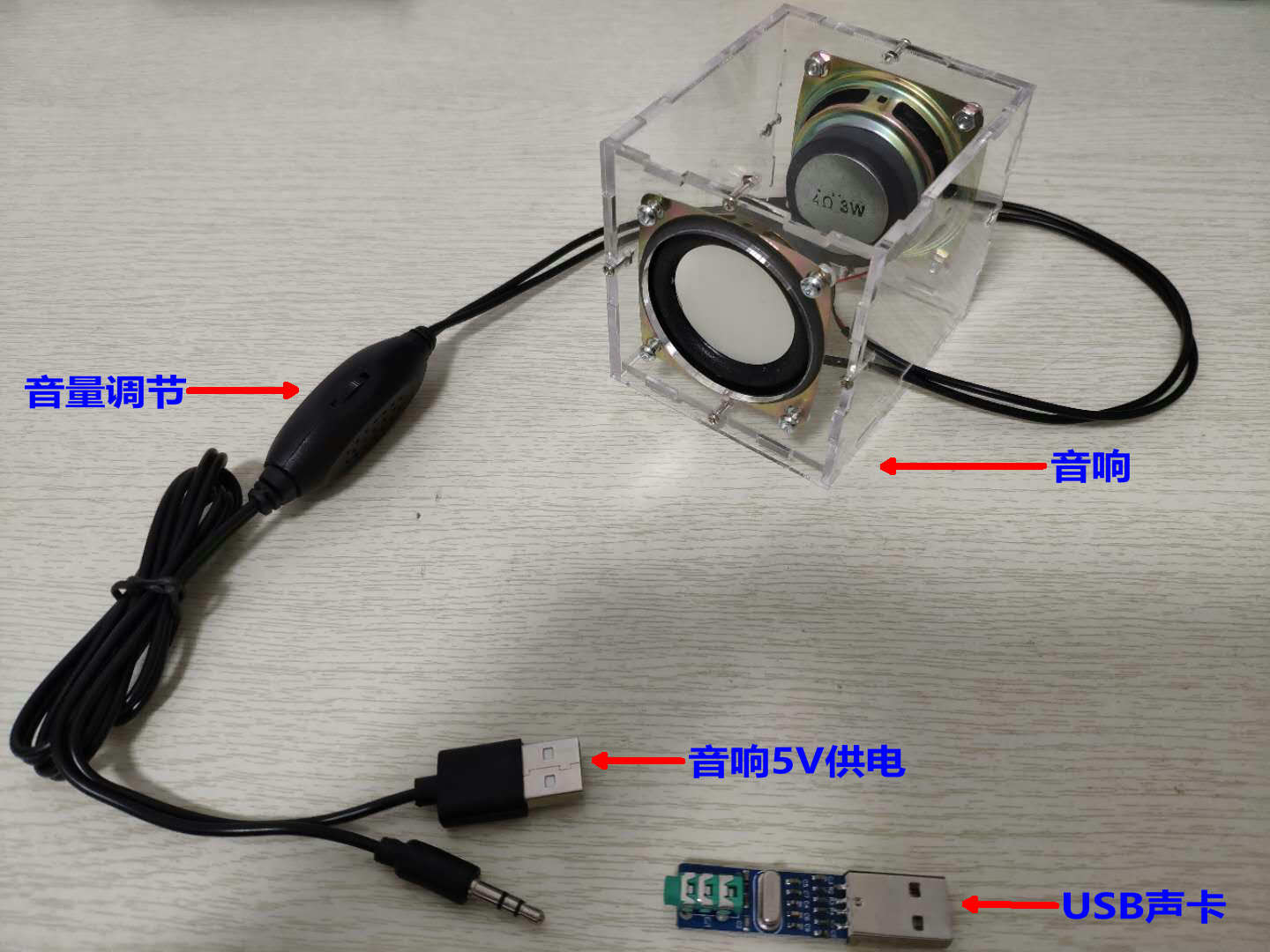
(图29)音响
如图29,为音响的基本配件。这里需要说明一下,由于后面使用树莓派3作为机器人的大脑,不过树莓派3的自带声卡不好用,驱动容易崩溃,所以这里推荐使用免驱的USB声卡。其实,声卡就是DA转换器,就是将数字音频信号转换为模拟电压信号;音响就是将声卡输出的模拟电压进行放大并通过喇叭播放出来。
4.2.麦克风与摄像头

(图30)麦克风与摄像头
如图30,摄像头上直接集成了麦克风。这里选用的是四麦阵列指向性麦克风,可以对特定方向上的声音拾取,并过滤其他方向上的杂音。这里的摄像头是640x480像素60fps。
4.3.在机器人中使用音响麦克风与摄像头

(图31)麦克风与摄像头
我们只需要在机器人上安装对应的ROS驱动,就可以通过发布和订阅相应的主题来实现对传感器的访问了。如图31,iat语音识别节点用于驱动麦克风,并将麦克风采集的语音转换为文字;问答(QA)和自然语言处理(NLP)节点处理iat语音识别节点发布的文字,并将处理结果发布给tts语音合成节点;tts语音合成节点订阅问答(QA)和自然语言处理(NLP)节点发布的文字,并驱动声卡将文字转换为语音;摄像头ROS驱动将摄像头数据直接发布到相应的话题。这样机器人上的其他节点都可以通过订阅与发布相应的节点来访问麦克风、声卡和摄像头。关于图像、语音、文字等处理的具体应用将在后面详细展开。
后记
------SLAM+语音机器人DIY系列【目录】快速导览------
第1章:Linux基础
第2章:ROS入门
第3章:感知与大脑
第4章:差分底盘设计
第5章:树莓派3开发环境搭建
第6章:SLAM建图与自主避障导航
2.google-cartographer机器人SLAM建图
第7章:语音交互与自然语言处理
第8章:高阶拓展
2.centos7下部署Django(nginx+uwsgi+django+python3)
----------------文章将持续更新,敬请关注-----------------
如果大家对博文的相关类容感兴趣,或有什么技术疑问,欢迎加入下面的《SLAM+语音机器人DIY》QQ技术交流群,一起讨论学习^_^

SLAM+语音机器人DIY系列:(三)感知与大脑——4.音响麦克风与摄像头的更多相关文章
- SLAM+语音机器人DIY系列:(三)感知与大脑——2.带自校准九轴数据融合IMU惯性传感器
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——1.ydlidar-x4激光雷达
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——3.轮式里程计与运动控制
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——5.机器人大脑嵌入式主板性能对比
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(三)感知与大脑——6.做一个能走路和对话的机器人
摘要 在我的想象中机器人首先应该能自由的走来走去,然后应该能流利的与主人对话.朝着这个理想,我准备设计一个能自由行走,并且可以与人语音对话的机器人.实现的关键是让机器人能通过传感器感知周围环境,并通过 ...
- SLAM+语音机器人DIY系列:(六)SLAM建图与自主避障导航——2.google-cartographer机器人SLAM建图
摘要 通过前面的基础学习,本章进入最为激动的机器人自主导航的学习.在前面的学习铺垫后,终于迎来了最大乐趣的时刻,就是赋予我们的miiboo机器人能自由行走的生命.本章将围绕机器人SLAM建图.导航避障 ...
- SLAM+语音机器人DIY系列:(二)ROS入门——6.编写简单的service和client
摘要 ROS机器人操作系统在机器人应用领域很流行,依托代码开源和模块间协作等特性,给机器人开发者带来了很大的方便.我们的机器人“miiboo”中的大部分程序也采用ROS进行开发,所以本文就重点对ROS ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——4.底盘ROS驱动开发
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
- SLAM+语音机器人DIY系列:(四)差分底盘设计——5.底盘PID控制参数整定
摘要 运动底盘是移动机器人的重要组成部分,不像激光雷达.IMU.麦克风.音响.摄像头这些通用部件可以直接买到,很难买到通用的底盘.一方面是因为底盘的尺寸结构和参数是要与具体机器人匹配的:另一方面是因为 ...
随机推荐
- 深入css布局篇(2) — 定位与浮动
深入css布局(2) - 定位与浮动 在css知识体系中,除了css选择器,样式属性等基础知识外,css布局相关的知识才是css比较核心和重要的点.今天我们来深入学习一下css布局相关的知识 ...
- i春秋----Misc
好久没有写 博客今天更新多了一些 解题思路:题目做多了,自然能够想到是凯撒解密: 查看得到答案; flag{4c850c5b3b2756e67a91bad8e046dda} 2: 解题思路:是我想太多 ...
- python-----HTMLTestRunner报告生成注意点!
简单的测试加HTMLTestRunner使用的具体方式如下:
- Android ROM包定制(解包,增删模块,打包)
1. 解包 假设有一个名为update.zip的ROM包,我们要在Ubuntu下对它进行定制.首先把system.transfer.list和system.new.dat.br(有些旧版的系统的镜像可 ...
- MySQL 中基于 XA 实现的分布式事务
1 XA协议 首先我们来简要看下分布式事务处理的XA规范可知XA规范中分布式事务有AP,RM,TM组成: 其中应用程序(Application Program ,简称AP):AP定义事务边界(定义事务 ...
- 为自己搭建一个分布式 IM(即时通讯) 系统
前言 大家新年快乐! 新的一年第一篇技术文章希望开个好头,所以元旦三天我也没怎么闲着,希望给大家带来一篇比较感兴趣的干货内容. 老读者应该还记得我在去年国庆节前分享过一篇<设计一个百万级的消息推 ...
- TensorFlow读写数据
前言 只有光头才能变强. 文本已收录至我的GitHub仓库,欢迎Star:https://github.com/ZhongFuCheng3y/3y 回顾前面: 从零开始学TensorFlow[01-搭 ...
- 微服务容错限流Hystrix入门
为什么需要容错限流 复杂分布式系统通常有很多依赖,如果一个应用不能对来自依赖 故障进行隔离,那么应用本身就处在被拖垮的风险中.在一个高流量的网站中,某个单一后端一旦发生延迟,将会在数秒内导致 所有应用 ...
- 02. Install redis on Linux
安装下载redis,参考官方文档:https://redis.io/download 下载: shell>wget http://download.redis.io/releases/redis ...
- Mac OS X中开启或关闭显示隐藏文件命令
前言:之前一直用的都是 windows 系统的电脑,刚接触 Mac ,很多功能都不熟悉,写下博客记录一下,以防以后忘记,也给后来者提供方便. 命令行方式:显示隐藏文件: defaults write ...