TurtleBot 3 & 2i ROS开源实验平台
TurtleBot 3 & 2i ROS开源实验平台,全球更受欢迎的ROS平台。
TurtleBot是ROS标准平台机器人,在全球开发人员和学生中深受欢迎。其有3个版本: TurtleBot1——在iRobot的Roomba研究机器人Create之上开发,用于ROS部署,于2010年开发并发售; TurtleBot2——2012年Yujin Robot在研究机器人iClebo Kobuki的基础上开发; TurtleBot3——2017年旨在补充其前代产品的不足功能和用户需求,采用ROBOTIS智能执行器Dynamixel用于驾驶。
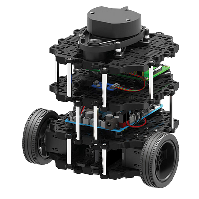
TurtleBot3 Burger
![]()
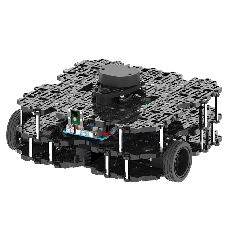
TurtleBot3 Waffle Pi
![]()
![]()
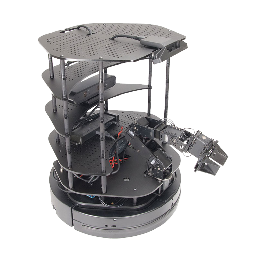
TurtleBot 2i
![]()
TurtleBot3是一款小型、价格适中、可编程的基于ROS的移动机器人,用于教育,研究,业余爱好和产品原型制作,目标是在不牺牲其功能品质和质量的情况下减小平台尺寸并降低价格,并提供可扩展性。 TurtleBot3的核心技术是SLAM(即时定位和构建地图)、导航和操纵,并可从实验室、笔记本电脑、游戏板或基于Android的智能手机实现远程控制;TurtleBot3可以进行移动跟随;可以连接操纵器(如开放式机械手)作为移动操作器来操纵对象。开放式机械手具有与Waffle Pi兼容的优势,弥补缺乏自由性的缺点,从而作为具有SLAM和导航功能的 服务机器人具有更高的完整性。 您可以根据对机械零件的重构方式及使用可选零件(例如计算机和传感器)对TurtleBot3进行各种自定义,更低成本、更小尺寸的SBC适用于强大的嵌入式系统、360度距离传感器和3D打印技术。
TurtleBot3特点 :

![]()

![]()

![]()

![]()

![]()

![]()

![]()

![]()
TurtleBot3主要功能:

![]()
TurtleBot3 Burger & Waffle Pi
 Turtlebot3-Waffle-pi
Turtlebot3-Waffle-pi Turtlebot3-Burger
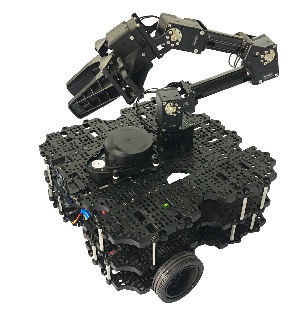
Turtlebot3-Burger Waffle Pi+X52机械臂(视觉)扩展手
Waffle Pi 移动操纵手—Waffle Pi KT是一款功能更加强大的软件和硬件双开源的小型化ROS移动平台。采用模块化设计,除本身Waffle Pi传感器外,Waffle Pi KT基于四轮全向移动平台集成了小型5自由度的轻量机械手臂(OpenManipulatorRM-X52-TNM)、深度相机、功能更强大的开发版以及二维激光雷达。 Waffle Pi KT基于ROS机器人操作系统使之可以完成自主定位与导航,SLAM地图构建,物体识别与抓取,多关节手臂复杂环境下的运动规划等功能;适合用于ROS教学、科学研究、多机器人协作,以及机器人爱好者的产品原型设计等。
![]()
Turtlebot3 Burger视觉PRO版-ZNPTV
TB3 汉堡视觉 PRO 版的核心技术是 360 度 SLAM 导航和规划,通过360°点云探测物体的位置信息、距离信息、尺寸信息等,通过预处理视觉系统识别二维码,得到物体的身份信息,以及 WIFI 通讯模块实现多智能体的组网。
TB3 汉堡视觉 PRO 版可根据需要重新定制配置控制器、传感器、3D 打印机械部件等;核心目标是成为学生“软件开发”、“动手实践”、“多机器人协作”、“创意展示”、“竞赛”等综合平台,最大程度的激发出学生们对机器人学习兴趣,从而激发学生自发的求知欲和创造欲。
 Turtlebot3 Burger视觉PRO版-ZNPTV
Turtlebot3 Burger视觉PRO版-ZNPTVTurtlebot 2i
TurtleBot 2i移动研究机器人是一种基于ROS的模块化机器人平台。TurtleBot 2i对TurtleBot的先前迭代进行了改进,具有全新设计的模块化底盘,并且实现了对机械臂的本地支持。TurtleBot 2i提供了Pincher MK3 4 DOF机械臂作为受支持的标准选件,允许机器人与现实世界中的小物体交互,从而有效地将TurtleBot转变为功能强大的移动操纵器,以更加平易近人的方式将以前令人生畏的技术和研究领域,例如自主导航和机器人操纵带入创新者和开发人员的手中。


Turtlebot 2i 技术特点
1、TurtleBot 2i由Intel NUC BOXNUC6CAYH驱动,具有双3D摄像头配置,使用专用的远程Orbbec Astra进行导航和制图,以及短距离的Intel RealSense摄像头SR300系列作为专用的操作工作空间传感器。
2、TurtleBot 2i提供了Pincher MK3机械臂作为支持的标准,允许该机器人与现实世界中的小物体,按钮和工具进行交互。 Arbotix-M Robocontroller为Pincher Mk3手臂提供了一个接口,该接口使用开源逆运动学解决方案MoveIt实现,允许用户仅使用高级命令来控制手臂。


![]()
TurtleBot 2i ROS软件/演示功能
1.创建地图
2.自主导航和点云映射
3.前进避障和路径规划
4.地图区域标识和航点
5.定点自导航 ·跟随演示
6.机器人手臂对象的处理和排序
7.远程操作示例
8.带底座的自动充电

![]()
应用场合
-个人自主搭建属于自己的机器人
-机器人研发&及机器人示范教育
-多功能机器人研究用
-对开源社区软件培训及学习用
目标人群
-学生,如自动化,电子及计算机软件专业
-研发人员
-相关教师,技术培训人员
-机器人爱好者

![]()

![]()
TurtleBot 2i配备有ROS开放源码的SDK,及相关的示例源代码,以帮助使用者开发及测试自己开发机器人算法程序。并且由于TurtleBot 2i价格便宜,非常适合用来做机器人研究以及为个人或家庭提供机器人开发平台,故正在被越来越多的院校、研究所以及个人所采用。 与此同时您完全不用担心购买后的使用问题,智能佳有专业的技术服务支持团队为你提供支持。
TurtleBot 3 & 2i ROS开源实验平台的更多相关文章
- NFV实验平台
NFV架构如下图所示. NFVI对应于数据平面,数据平面转发数据并提供用于运行网络服务的资源. MANO对应于控制平面,该控制平面负责构建各种VNF之间的连接以及编排NFVI中的资源. VNF层对应于 ...
- ROS开源小车TurtleBot3详情介绍
您为什么要选择ROS开源智能小车 ROS(Robot Operating System,机器人操作系统)是目前世界上更主流更多人使用的的机器人开源操作系统.它可以提供操作系统应有的服务,包括硬件抽象, ...
- OpenManipulator RM-X52 ROS 开源机械臂
DYNAMIXEL PRO PH54-200-S500-R 简介
- 开源任务管理平台TaskManager介绍
很早之前准备写Quartz系列文章,现在终于能够实现了.从本篇开始将带你实现一款自己的任务管理平台.在工作中你曾经需要应用执行一个任务吗?这个任务每天或每周星期二晚上11:30,或许仅仅每个月的最后一 ...
- 开源任务管理平台TaskManagerV2.0介绍及升级说明
上一篇开源任务管理平台TaskManager介绍发布后,有网友联系我看看能不能做个后台管理界面,方便管理系统中所有的任务.由于时间和技术问题1.0版本的时候,新增了一个3分钟读取配置文件动态修改任务的 ...
- 如何在Form++开源组态平台添加硬件采集接口
E-Form++是一套值得推荐的高品质开源C++矢量图形库,C++编程之所以异常困难,主要就是没有很专业的C++基础架构库有关.E-Form++的出现一定程度上填补了这个空白.是开发工控.监控.建模与 ...
- openstack(liberty):部署实验平台(二,简单版本软件安装 part2)
继续前面的part1,将后续的compute以及network部分的安装过程记录完毕! 首先说说compute部分nova的安装. n1.准备工作.创建数据库,配置权限!(密码依旧是openstack ...
- openstack(liberty):部署实验平台(一,基础网络环境搭建)
openstack项目的研究,到今天,算是要进入真实环境了,要部署实验平台了.不再用devstack了.也就是说,要独立controller,compute,storage和network了.要做这个 ...
- 开源安全平台Ossim 4.5系统使用入门(高清视频)
开源安全平台Ossim 4.5系统使用入门 时长:15分钟 观看地址: http://www.tudou.com/programs/view/Yb0m4vPYlIQ/ 视频截图: 650) this. ...
随机推荐
- 关于javaSMTP协议发邮件你必须知道的知识点
1.阅读官方吐槽 Note also that THERE IS NOT SUFFICIENT DOCUMENTATION HERE TO USE THESE FEATURES!!! You will ...
- Python中使用“模块名.__all__”查看模块建议导出的属性
在<第10.5节 使用__all__定义Python模块导入白名单>中,老猿介绍了在自定义模块中使用定义__all__属性来提供模块对外可见的白名单,使用该机制除了可以定义访问的白名单外, ...
- [BJDCTF2020]Mark loves cat && [BJDCTF 2nd]简单注入 && [BJDCTF2020]The mystery of ip
[BJDCTF2020]Mark loves cat 源码泄露 使用GitHack.py下载源码 下载之后对源代码进行审计 flag.php代码为: <?php $flag = file_get ...
- 冲刺Day3
每天举行站立式会议照片: 昨天已完成的工作: 1.完成登录注册的后台代码. 2.确定商品查找的接口. 3.尝试与数据库连接. 今天计划完成的工作: 成员 任务 高嘉淳 完成用户信息管理的部分功能 覃泽 ...
- Day2 Scrum 冲刺博客
线上会议: 昨天已完成的工作与今天计划完成的工作及工作中遇到的困难: 成员姓名 昨天完成工作 今天计划完成的工作 工作中遇到的困难 纪昂学 总结会议内容,思考自己所分配到的任务 创建一个Cell类,用 ...
- 【WC2014】紫荆花之恋(替罪羊重构点分树 & 平衡树)
Description 若带点权.边权的树上一对 \((u, v)\) 为 friend,那么需要满足 \(\text{dist}(u, v) \le r_u + r_v\),其中 \(r_x\) 为 ...
- MVC错误页面相关说明
1.如果使用普通的纯静态页面,在httpErrors中配置的话,返回的status code是200,不会是对应的错误码404.只能使用,aspx或mvc页面,加入,这样就会返回的时候就会显示404错 ...
- oracle归档空间不足的问题(rman删除归档日志)
案例一:归档日志满,数据库用户无法登陆,业务异常 解决方案一(可以登录rman): rman target / RMAN> crosscheck archivelog all; RM ...
- Linux安装Mycat1.6.7.4并实现Mysql数据库读写分离简单配置
1. Mycat简介 一个彻底开源的,面向企业应用开发的大数据库集群 支持事务.ACID.可以替代MySQL的加强版数据库 一个可以视为MySQL集群的企业级数据库,用来替代昂贵的Oracle集群 一 ...
- xwiki升级8.8.4
安装包下载: http://download.forge.ow2.org/xwiki/xwiki-enterprise-jetty-hsqldb-8.4.4.zip 推荐使用jetty包,方便快捷,不 ...