SDRAM 学习笔记(三)
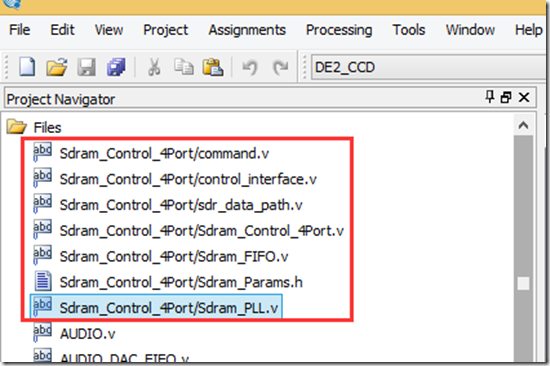 上图是terasic公司提供的SDRAM控制器,大部分已经封装好,我们需要修改其中部分代码,以此来实现我们自己需要的功能。
上图是terasic公司提供的SDRAM控制器,大部分已经封装好,我们需要修改其中部分代码,以此来实现我们自己需要的功能。
1.PLL时钟设定
首先上面的sdram_pll.v中产生上一篇博客所需要的“驱动时钟”和“控制时钟”,这两个时钟由于PCB走线延时,两个时钟会有一定的时间差,一般会设定在-3ns ~ 1ns之间。如下图所示:
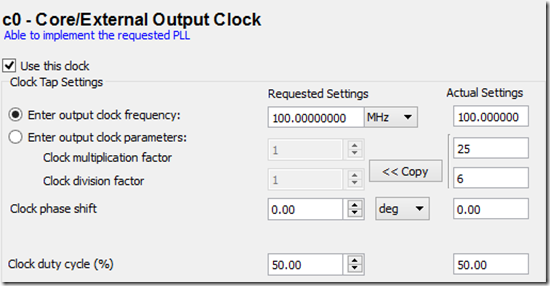
 上图是对SDRAM的PLL进行的更改,这个时钟差设定多少没有严格规定,可以先设定一个值,读取出图像进行调试,看图像是否帧错位或者图像显示不正确等原因,多是由于PLL没有配置好所导致,可以修改此部分进行修改,重新设定。
上图是对SDRAM的PLL进行的更改,这个时钟差设定多少没有严格规定,可以先设定一个值,读取出图像进行调试,看图像是否帧错位或者图像显示不正确等原因,多是由于PLL没有配置好所导致,可以修改此部分进行修改,重新设定。
2.SDRAM_parameter.h 参数设置
之前在VGA显示一篇博客中,就用到了这种思想,就是将常用的参数设定在一个.h文件或者.v文件,然后利用 `include "Sdram_Params.h"加载进来即可。
在此模块中,我们需要将常用到的一些参数设置好,主要用到以下一些参数:
(1) SDRAM parameter.h
笔者使用H57V2562GTR和H57V641620E系列,再此以H57V2562GTR为例。

//==================================================
//address space parameters
// 4M x 4 x 16bit = (8192 x 512)x 4 x 16bit = 256Mbit 注意,8192和512分别为行数和列数。
//行和列的地址,行是12位的,列是8位的,所以会用到这样的乘积。
//宏定义的参数
‘define ROWSIZE 13 //行的宽度在一个bank中
‘define COLSIZE 9 //列的宽度在一个bank中
‘define DSIZE 16 //width of data bus to SDRAM 16bit SDRAM data
‘define BANKSIZE 2 //4 banks in one SDRAM
//所利用宏定义的参数
‘define COLSTART 0
‘define ROWSTART ‘COLSIZE
‘define BANKSTART ‘COLSIZE + ‘ROWSIZE
‘define ASIZE ‘ROWSIZE + ‘ COLSIZE + ’ BANKSIZE
//==================================
//上述是对SDRAM的位宽,行宽,列宽,行起始,列起始,bank数,进行设置。已经最大限度参数化,对
//于同一类hynix这一部分所需要更改的只需更改ROWSIZE和COLSIZE以及DSIZE即可。
//==================================================
(2) 按照SDRAM的驱动流程,那么接下来应该是先200us的SDRAM的稳定启动。
INIT_PER = 200us / T = 200 x 10^3ns / (1000/CLK) = 200 x CLK;
其中CLK为xxMHz的驱动时钟频率,已经转换为ns状态下,所以为1000/clk。以上是计算出来的是延时计 数,就是一开始上电之后,先有一个200us的延时。
比如驱动时钟频率为100MHz,则INIT_PRE = 20000;
比如驱动时钟频率为133MHz,则INIT_PRE = 26600;
//==================================================
(3) 预刷新计数的宏定义
存储器上面的手册的信息是64ms必须完成所有逻辑单元的更新,主要是希望保证SDRAM数据不丢失的前提下,尽可能提高SDRAM的有效带宽,因此设置64ms为刷新间隔上限。
行刷新周期时间 = 64ms / 每个bank的行数.
例如,如果有4096行,则行刷新周期为 64ms / 4096 = 15.625us。
例如,如果有8192行,则行刷新周期为 64ms / 8192 = 7.8125us。
所以REF_PER = 15.625us / (1000/CLK) =15.625 x 10^3 ns / (1000/CLK) = 15.625 x CLK (对应有4096行)
REF_PER = 7.8125us / (1000/CLK) =7.8125 x 10^3 ns / (1000/CLK) = 7.8125x CLK (对应有8192行)
只要至少在预刷新的时间内刷新一次即可,若是有小数部分,可以取最大的整数,忽略小数部分,取最大的整数。
如4096行采用100MHz 时钟频率进行驱动,则15.625 x 100 = 1562/1563均可。
//==================================================
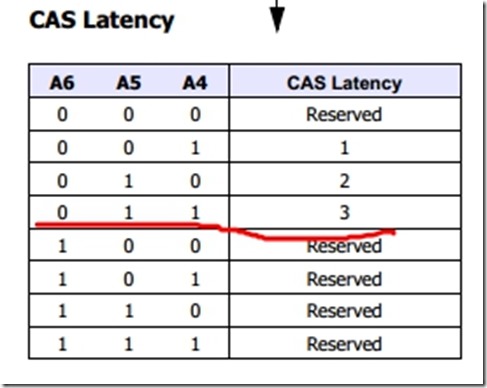
(4) SC_CL潜伏期延时的宏定义
SC_CL为SDRAM列选通命令的潜伏期延时设定,手册规定为2或者3;潜伏期的延时大小直接关系到SDRAM的最高运行速率,因此一般选择3。
定义SC_CL的宏后,会映射到SDR_CL的宏上,这个直接关系到最终的潜伏期选择,
parameter SDR_CL = (SC_CL == 2)? 3’b10 : 3’b11;
//==================================================
(5) SC_RCD数据读取延时定义
保持默认值3
//==================================================
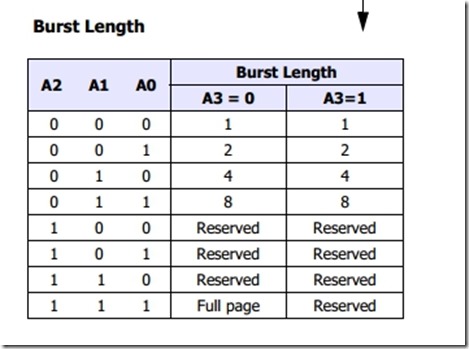
(6) SC_PM突发长度命令宏定义
这里采用了全页突发读/写操作,因此直接设置为A2A1A0 = 1 1 1;
为了便于其他模式修改:通过宏定义选择突发读写长度:
parameter SC_BL = 1;
//SDRAM parameter
parameter SDR_BL = (SC_PM == 1)? 3’b111: //page 256
(SC_BL == 1)? 3’b000: //1
(SC_BL == 2)? 3’b001: //2
(SC_BL == 4)? 3’b010: //4
3’b011; //8
//==================================================
(7) 突发顺序/交错读/写宏定义
一般在视频流的操作中采用顺序读/写,这里的宏定义如下:
parameter SDR_BT = 1’b0 ; // 顺序读/写 A3 = 0
// 1’b1; // 交错读/写 A3 = 1;
以上就是所有SDRAM所需要设定的参数。
//==================================================
//下面是terasic 公司的SDRAM参数设置。
// Address Space Parameters
`define ROWSTART 8
`define ROWSIZE 12
`define COLSTART 0
`define COLSIZE 8
`define BANKSTART 20
`define BANKSIZE 2
// Address and Data Bus Sizes
`define ASIZE 23 // total address width of the SDRAM
`define DSIZE 16 // Width of data bus to SDRAMS
//parameter INIT_PER = 100; // For Simulation
// Controller Parameter
//////////// 133 MHz ///////////////
/*
parameter INIT_PER = 32000;
parameter REF_PER = 1536;
parameter SC_CL = 3;
parameter SC_RCD = 3;
parameter SC_RRD = 7;
parameter SC_PM = 1;
parameter SC_BL = 1;
*/
///////////////////////////////////////
//////////// 100 MHz ///////////////
parameter INIT_PER = 24000;
parameter REF_PER = 1024;
parameter SC_CL = 3;
parameter SC_RCD = 3;
parameter SC_RRD = 7;
parameter SC_PM = 1;
parameter SC_BL = 1;
///////////////////////////////////////
//////////// 50 MHz ///////////////
/*
parameter INIT_PER = 12000;
parameter REF_PER = 512;
parameter SC_CL = 3;
parameter SC_RCD = 3;
parameter SC_RRD = 7;
parameter SC_PM = 1;
parameter SC_BL = 1;
*/
///////////////////////////////////////
// SDRAM Parameter
parameter SDR_BL = (SC_PM == 1)? 3'b111 :
(SC_BL == 1)? 3'b000 :
(SC_BL == 2)? 3'b001 :
(SC_BL == 4)? 3'b010 :
3'b011 ;
parameter SDR_BT = 1'b0; // Sequential
// 1'b1: // Interteave
parameter SDR_CL = (SC_CL == 2)? 3'b10:3'b11;
//=======================================
//优化上述各参数如下所示:
// Address and Data Bus Sizes
//(1M * 4) * 16Bit =(4096 * 256) * 4 * 16Bit = 64MBit
`define ROWSIZE 12 //Rows width in one bank
`define COLSIZE 8 //Column width in one bank
`define DSIZE 16 //16Bit SDRAM data
`define BANKSIZE 2 //4 Banks in one SDRAM
`define ASIZE `COLSIZE + `ROWSIZE + `BANKSIZE //SDRAM Total address
// Address Space Parameters -> The new code addres: {Bank, Row, Column}
`define COLSTART 0
`define ROWSTART `COLSIZE
`define BANKSTART `COLSIZE + `ROWSIZE//上述将rowstart和bankstart进行了参数化,只需修改有限几个参数即可。
//---------------------------------------
//SDRAM Init paramter setting
//`define ROW4096_133MHz
//`define ROW4096_125MHz
`define ROW4096_100MHz
//`define ROW8192_133MHz
//`define ROW8192_125MHz
//`define ROW8192_100MHz//利用命令`define…….`ifdef …….`endif 结构来实现对模式的选择,可以方便的修改。
`ifdef ROW4096_133MHz
// Controller Parameter for 4096 Rows @ 133MHz
parameter INIT_PER = 16'd26600; //200 * 133
parameter REF_PER = 16'd2078; //15.625*133 = 2078.125
parameter SC_CL = 3;
parameter SC_RCD = 3;
parameter SC_PM = 1;
parameter SC_BL = 1;
`endif
`ifdef ROW4096_125MHz
// Controller Parameter for 4096 Rows @ 125MHz
parameter INIT_PER = 16'd25000; //200 * 125
parameter REF_PER = 16'd1953; //15.625*125 = 1953.125
parameter SC_CL = 3;
parameter SC_RCD = 3;
parameter SC_PM = 1;
parameter SC_BL = 1;
`endif
`ifdef ROW4096_100MHz
// Controller Parameter for 4096 Rows @ 100MHz
parameter INIT_PER = 16'd20000; //200 * 100
parameter REF_PER = 16'd1562; //15.625*100 = 1562.5
parameter SC_CL = 3;
parameter SC_RCD = 3;
parameter SC_PM = 1;
parameter SC_BL = 1;
`endif
`ifdef ROW8192_133MHz
// Controller Parameter for 8192 Rows @ 133MHz
parameter INIT_PER = 16'd26600; //200 * 133
parameter REF_PER = 16'd1039; //7.8125*133 = 1039.0625;
parameter SC_CL = 3;
parameter SC_RCD = 3;
parameter SC_PM = 1;
parameter SC_BL = 1;
`endif
`ifdef ROW8192_125MHz
// Controller Parameter for 8192 Rows @ 125MHz
parameter INIT_PER = 16'd25000; //200 * 125
parameter REF_PER = 16'd976; //7.8125*125 = 976.5625
parameter SC_CL = 3;
parameter SC_RCD = 3;
parameter SC_PM = 1;
parameter SC_BL = 1;
`endif
`ifdef ROW8192_100MHz
// Controller Parameter for 8192 Rows @ 100MHz
parameter INIT_PER = 16'd20000; //200 * 100
parameter REF_PER = 16'd781; //7.8125*100 = 781.25
parameter SC_CL = 3;
parameter SC_RCD = 3;
parameter SC_PM = 1;
parameter SC_BL = 1;
`endif
//-----------------------------------------------------------
// SDRAM Parameter
parameter SDR_BL = (SC_PM == 1)? 3'b111 : //Page 256
(SC_BL == 1)? 3'b000 : //1
(SC_BL == 2)? 3'b001 : //2
(SC_BL == 4)? 3'b010 : //4
3'b011 ; //8
parameter SDR_BT = 1'b0; // Sequential
// 1'b1: // Interteave
parameter SDR_CL = (SC_CL == 2)? 3'b10:
3'b11;
上述就定义完成了SDRAM初始化以及模式配置所需要的各寄存器参数,上述的配置正确与否直接决定了输出的数据和运行速率。
//=======================================================================
更多详细的资料下载可以登录笔者百度网盘:
网址:http://pan.baidu.com/s/1bnwLaqF
密码:fgtb
//=======================================================================
SDRAM 学习笔记(三)的更多相关文章
- Oracle学习笔记三 SQL命令
SQL简介 SQL 支持下列类别的命令: 1.数据定义语言(DDL) 2.数据操纵语言(DML) 3.事务控制语言(TCL) 4.数据控制语言(DCL)
- [Firefly引擎][学习笔记三][已完结]所需模块封装
原地址:http://www.9miao.com/question-15-54671.html 学习笔记一传送门学习笔记二传送门 学习笔记三导读: 笔记三主要就是各个模块的封装了,这里贴 ...
- JSP学习笔记(三):简单的Tomcat Web服务器
注意:每次对Tomcat配置文件进行修改后,必须重启Tomcat 在E盘的DATA文件夹中创建TomcatDemo文件夹,并将Tomcat安装路径下的webapps/ROOT中的WEB-INF文件夹复 ...
- java之jvm学习笔记三(Class文件检验器)
java之jvm学习笔记三(Class文件检验器) 前面的学习我们知道了class文件被类装载器所装载,但是在装载class文件之前或之后,class文件实际上还需要被校验,这就是今天的学习主题,cl ...
- VSTO学习笔记(三) 开发Office 2010 64位COM加载项
原文:VSTO学习笔记(三) 开发Office 2010 64位COM加载项 一.加载项简介 Office提供了多种用于扩展Office应用程序功能的模式,常见的有: 1.Office 自动化程序(A ...
- Java IO学习笔记三
Java IO学习笔记三 在整个IO包中,实际上就是分为字节流和字符流,但是除了这两个流之外,还存在了一组字节流-字符流的转换类. OutputStreamWriter:是Writer的子类,将输出的 ...
- NumPy学习笔记 三 股票价格
NumPy学习笔记 三 股票价格 <NumPy学习笔记>系列将记录学习NumPy过程中的动手笔记,前期的参考书是<Python数据分析基础教程 NumPy学习指南>第二版.&l ...
- Learning ROS for Robotics Programming Second Edition学习笔记(三) 补充 hector_slam
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- Learning ROS for Robotics Programming Second Edition学习笔记(三) indigo rplidar rviz slam
中文译著已经出版,详情请参考:http://blog.csdn.net/ZhangRelay/article/category/6506865 Learning ROS for Robotics Pr ...
- Typescript 学习笔记三:函数
中文网:https://www.tslang.cn/ 官网:http://www.typescriptlang.org/ 目录: Typescript 学习笔记一:介绍.安装.编译 Typescrip ...
随机推荐
- activiti工作流之Eclipse的Eclipse BPMN 2.0 Designer无法安装或者(安装后无法重复打开*.bpmn)
1.首先.既然学习activiti工作流,连官网和相应文件都没有下载就说不过去了 这是官网下载:http://www.activiti.org/download.html 2.对于下载后的activi ...
- 用“网建”平台发手机短信的C#代码
一直都用这个平台发手机短信的,今天做新项目的时候用到了,但是上来博客搜索不到,只好翻以前的源代码翻了好久才找到了,先记下来,以作备用: using System; using System.Colle ...
- FlexPaper:使用flash在线展示pdf
WFTools工具包中的PDF2SWF工具可用来将PDF格式文件转换成SWF格式.使用下面的命令可以将pdf文件转换为单页swf文件. pdf2swf pdfPath –o swfPath –T ...
- C++11 POD类型
POD,全称plain old data,plain代表它是一个普通类型,old代表它可以与c兼容,可以使用比如memcpy()这类c中最原始函数进行操作.C++11中把POD分为了两个基本概念的集合 ...
- 每日英语:How to Save Detroit
Detroit is beautiful-though you probably have to be a child of the industrial Midwest, like me, to s ...
- redis使用日志(4):如何让外部服务器访问
开启redis 允许外网IP 访问 在 Linux 中安装了redis 服务,当在客户端通过远程连接的方式连接时,报could not connect错误. 错误的原因很简单,就是没有连接上redis ...
- iOS 减法计算器
一: 在界面上拖入相应的控件 二: 给每个控件设置关联 //监听按钮的点击 - (IBAction)compute:(id)sender; //第一个文本输入框的值 @property (weak, ...
- Apache重写RewriteCond
RewriteCond就像我们程序中的if语句一样,表示如果符合某个或某几个条件则执行RewriteCond下面紧邻的RewriteRule语句,这就是RewriteCond最原始.基础的功能,为了方 ...
- 前端弹窗展示后台html文件
1,首先使用window.open函数,弹出返回jsp页面的窗口,对应viewZhengXinReport()方法,进行jsp页面的请求跳转forward 2,然后在jsp页面中使用ajax同步请求后 ...
- jQuery实现radio第一次点击选中第二次点击取消功能(转)
转载自:http://www.jb51.net/article/113730.htm 由于项目的需求,要求radio点击两次后为取消状态,不方便修改为checkbox,可以用正面的方法实现. // j ...