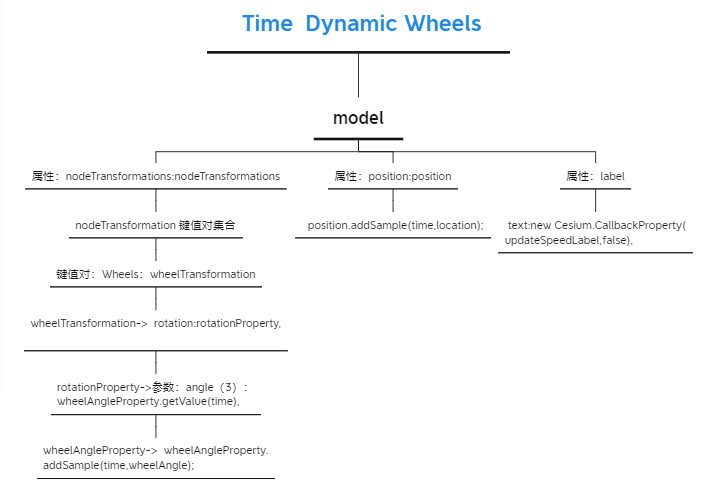
Cesium案例(六) Time Dynamic Wheels
Cesium案例(六) Time Dynamic Wheels的更多相关文章
- WPF案例 (六) 动态切换UI布局
原文:WPF案例 (六) 动态切换UI布局 这个Wpf示例对同一个界面支持以ListView或者CardView的布局方式呈现界面,使用控件ItemsControl绑定数据源,使用DataTempla ...
- cesium 学习(六) 坐标转换
cesium 学习(六) 坐标转换 一.前言 在场景中,不管是二维还好还是三维也罢,只要涉及到空间概念都会提到坐标,坐标是让我们理解位置的一个非常有效的东西.有了坐标,我们能很快的确定位置相关关系,但 ...
- Httpd服务入门知识-Httpd服务常见配置案例之DSO( Dynamic Shared Object)加载动态模块配置
Httpd服务入门知识-Httpd服务常见配置案例之DSO( Dynamic Shared Object)加载动态模块配置 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 一.加载动 ...
- Cesium案例解析(六)——3DTilesInspector监视器
目录 1. 概述 2. 案例 1. 概述 3D Tiles作为传输和渲染大规模3D地理空间数据的格式,应对的都是大规模数据的场景,Cesium提供了一个监视3D Tiles数据的监视器,可以通过这个监 ...
- CSharp 案例:用 Dynamic 来解决 DataTable 数值累加问题
需求说明 给定一个 DataTable,如果从中取出数值类型列的值并对其累加? 限制:不知该列是何种数值类型. 解决方案 1.将表转换为 IEnumerable<dynamic>,而后获取 ...
- Cesium案例解析(五)——3DTilesPhotogrammetry摄影测量3DTiles数据
目录 1. 概述 2. 案例 3. 结果 1. 概述 3D Tiles是用于传输和渲染大规模3D地理空间数据的格式,例如摄影测量,3D建筑,BIM / CAD,实例化特征和点云等.与常规的模型文件格式 ...
- Cesium案例解析(三)——Camera相机
目录 1. 概述 2. 实例 2.1. Camera.html 2.2. Camera.js 2.2.1. 飞行至某一点 2.2.2. 飞行至某区域 2.2.3. 两地之间飞行 2.2.4. 设置视图 ...
- awk处理之案例六:awk根据条件插入文本
编译环境 本系列文章所提供的算法均在以下环境下编译通过. [脚本编译环境]Federa 8,linux 2.6.35.6-45.fc14.i686 [处理器] Intel(R) Core(TM)2 Q ...
- Cesium案例解析(二)——ImageryLayers影像图层
目录 1. 概述 2. 实例 2.1. ImageryLayers.html 2.2. ImageryLayers.js 2.2.1. 代码 2.2.2. 解析 3. 结果 1. 概述 Cesium支 ...
- Cesium案例解析(一)——HelloWorld
目录 1. 概述 2. 实例 2.1. HelloWorld.html 2.2. HelloWorld.js 3. 结果 1. 概述 感觉网上已经有不少关于cesium的教程了,但是学习一个框架最快的 ...
随机推荐
- qt的其他窗口
一.qt的其他类族 2.Qlabel ui->setupUi(this); QFont font;//确立一个字体对象 font.setFamily("华文行楷");//字体 ...
- DE 算法的变体python实现
上演化计算课的时候老师讲了一种DE算法的改进算法CoDE,于是看了下CoDE的论文中的算法步骤: 算法中使用的三种交叉策略: 根据不同的交叉策略采取不同的变异策略: 超参数的三种不同组合(一一对应): ...
- 上分之路 VP Codeforces Round #744 (Div. 3) ABDE
VP情况 4 / 8 AC: A,B,D,E1 60 minutes WA: C 4 127 +00:02 +00:28 -7 +00:58 +00:39 手速还在线 D pair排个 ...
- ubuntu安装xface
Gnome.KDE.XFACE桌面环境安装和卸载 出自Ubuntu中文 安装桌面环境 (一)在终端中运行安装: 1.安装XFACE: sudo apt-get install xubuntu-desk ...
- Dubbo调用 Mybatis 实体类一对多时,报错
添加fetchType="eager"属性 ,急加载 作为笔记,供个人参考
- windows IIS http 自动转https
1.安装url重写组件 https://www.iis.net/downloads/microsoft/url-rewrite#additionalDownloads 2.刷新IIS 3.添加规则
- RabbitMQ和Erlang兼容对比
参考自 https://blog.csdn.net/qq_28169825/article/details/88294663 兼容对比官网链接 https://www.rabbitmq.com/whi ...
- springmvc拦截器的简单创建
找到前端控制器配置文件: 配置拦截器: 实现接口,定义自己的规则:
- test.sh 监听进程是否存在
监听myloader进程是否结束,结束后把时间输出到 /root/time.log vim test.sh #!/bin/bash #确保PRO查询进程唯一 PRO="myloader&qu ...
- java输入一个字符串,要求将该字符串中出现的英文字母, * 按照顺序输出,区分大小写,且大写优先
public static void main(String[] args) { String input ="A8r4c5jaAjp#7"; //转为char[] char[] ...