ardupilot_gazebo仿真(二)
ardupilot_gazebo仿真(二)
标签(空格分隔): 未分类
在模型中添加sensor
gezebo官网-sensor部分教程
gezebo官网-基础部分教程
Gazebo plugins in ROS
以camera为例
<sensor name="camera" type="camera">
<pose>0 0 0 0 -1.57 0</pose>
<camera>
<horizontal_fov>2.0</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>15000</far>
</clip>
</camera>
<always_on>1</always_on>
<update_rate>10</update_rate>
<visualize>1</visualize>
</sensor>
其中pose是3个position\((x,y,z)\)和1个旋转矢量\((\theta,\phi,\psi)\)
在ardupilot_gazebo中ardupilot_gazebo/models_gazebo/gimbal_small_2d是云台的模型,其中包括了相机的模型。通过更改pose可以改变相机的朝向和位置。
如果不对这个目录下的model.sdf进行修改,我们只能得到在gazebo中的图像,并不能与ROS进行通信,也就是说不能在rostopic中看到与camera相关的topic
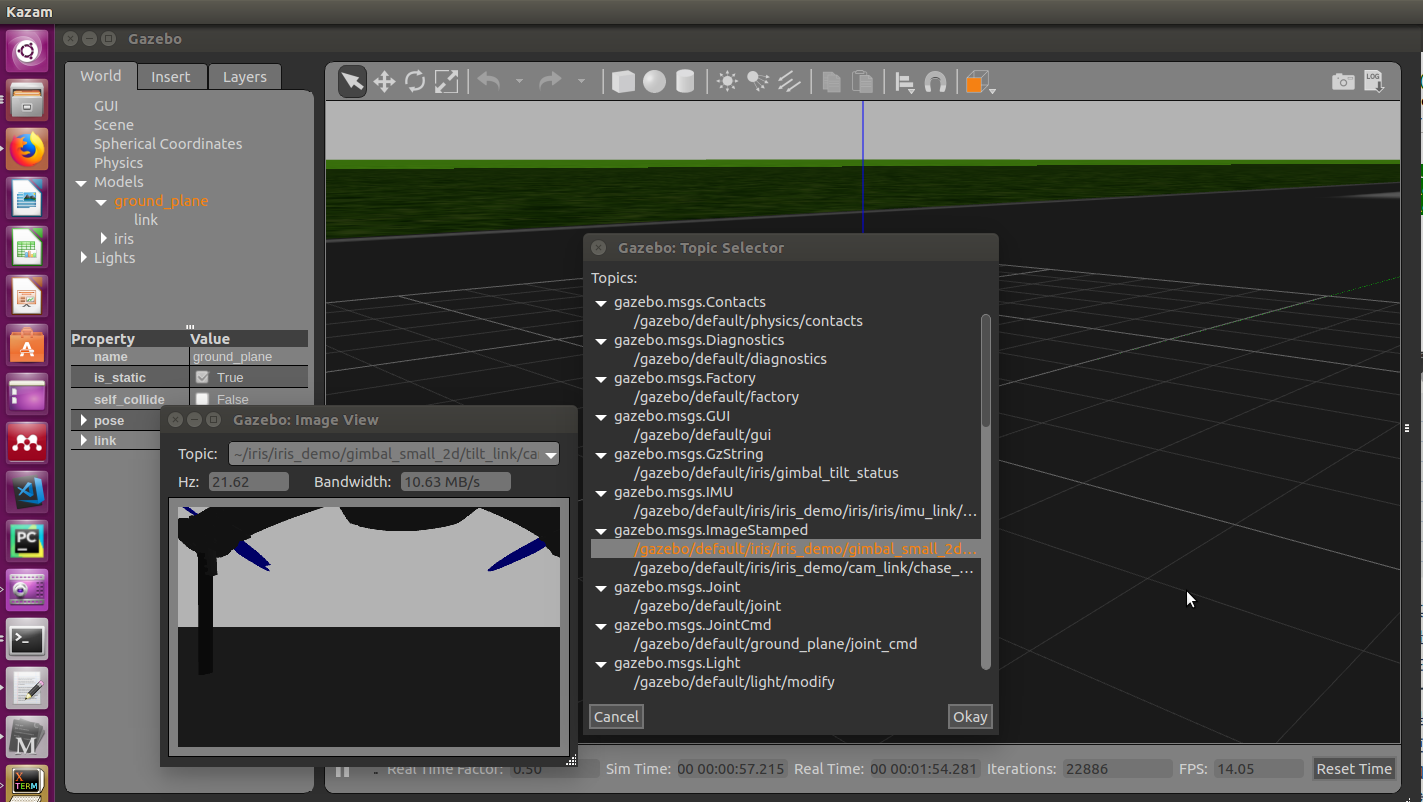
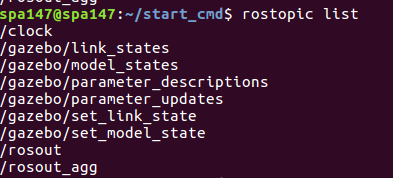
所以需要添加 senosrplugin
<robot>
... robot description ...
<link name="sensor_link">
... link description ...
</link>
<gazebo reference="sensor_link">
<sensor type="camera" name="camera1">
... sensor parameters ...
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
... plugin parameters ..
</plugin>
</sensor>
</gazebo>
</robot>
以camera为例
<!-- camera -->
<gazebo reference="camera_link">
<sensor type="camera" name="camera1">
<update_rate>30.0</update_rate>
<camera name="head">
<horizontal_fov>1.3962634</horizontal_fov>
<image>
<width>800</width>
<height>800</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.02</near>
<far>300</far>
</clip>
<noise>
<type>gaussian</type>
<!-- Noise is sampled independently per pixel on each frame.
That pixel's noise value is added to each of its color
channels, which at that point lie in the range [0,1]. -->
<mean>0.0</mean>
<stddev>0.007</stddev>
</noise>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<alwaysOn>true</alwaysOn>
<updateRate>0.0</updateRate>
<cameraName>rrbot/camera1</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<hackBaseline>0.07</hackBaseline>
<distortionK1>0.0</distortionK1>
<distortionK2>0.0</distortionK2>
<distortionK3>0.0</distortionK3>
<distortionT1>0.0</distortionT1>
<distortionT2>0.0</distortionT2>
</plugin>
</sensor>
</gazebo>
相关注释在官网介绍中可以看到。
下面是我们针对ardupilot_gazebo中的gimbal_small_2d模型进行的修改。在ardupilot_gazebo/models_gazebo/gimbal_small_2d目录下找到model.sdf,其中与 camera有关的代码如下:
<sensor name="camera" type="camera">
<pose>0 0 0 0 -1.57 0</pose>
<camera>
<horizontal_fov>2.0</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>15000</far>
</clip>
</camera>
<always_on>1</always_on>
<update_rate>30</update_rate>
<visualize>1</visualize>
</sensor>
在其中加入插件
<sensor name="camera" type="camera">
<pose>0 0 0 0 -1.57 0</pose>
<camera>
<horizontal_fov>2.0</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>15000</far>
</clip>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_camera.so">
<always_on>1</always_on>
<update_rate>30</update_rate>
<cameraName>rrbot/camera1</cameraName>
<imageTopicName>image_raw</imageTopicName>
<cameraInfoTopicName>camera_info</cameraInfoTopicName>
<frameName>camera_link</frameName>
<visualize>1</visualize>
</plugin>
</sensor>
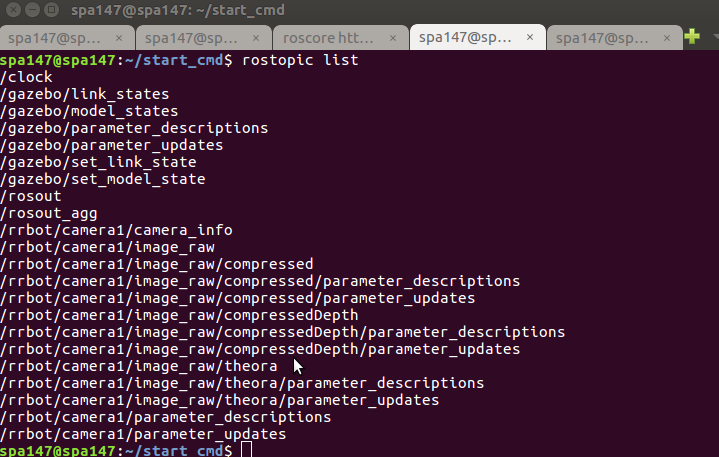
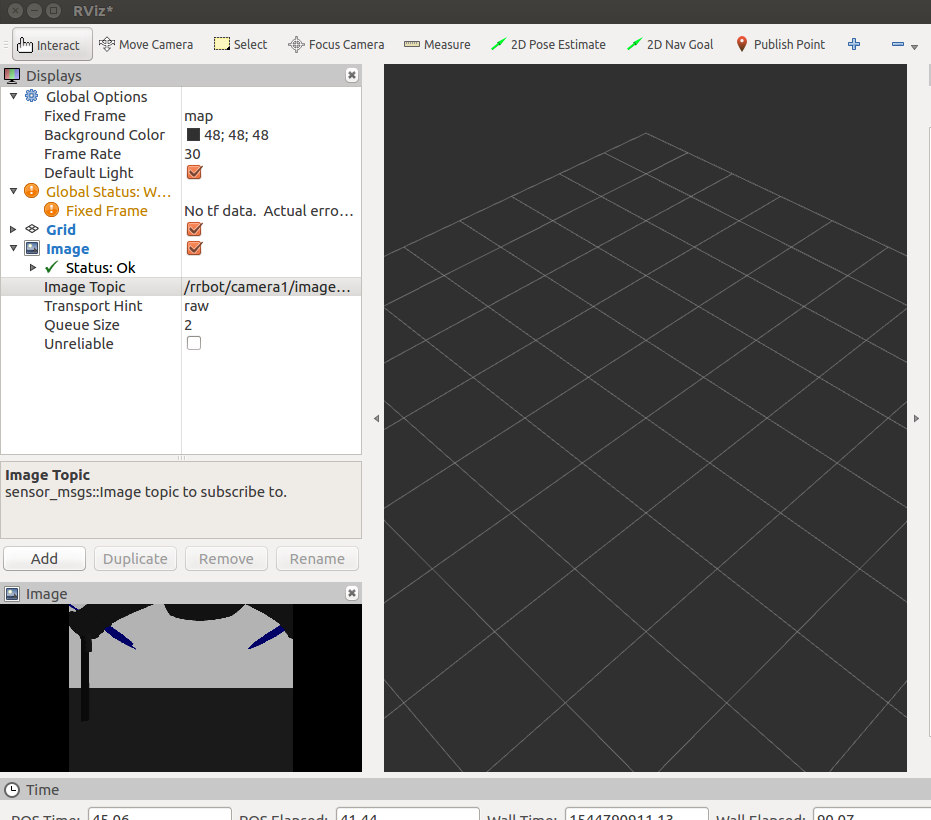
运行代码可以看到在rostopic中有了camera的相关topic
运行rviz然后添加imgae可以看到图像
rosrun rviz rviz
add image
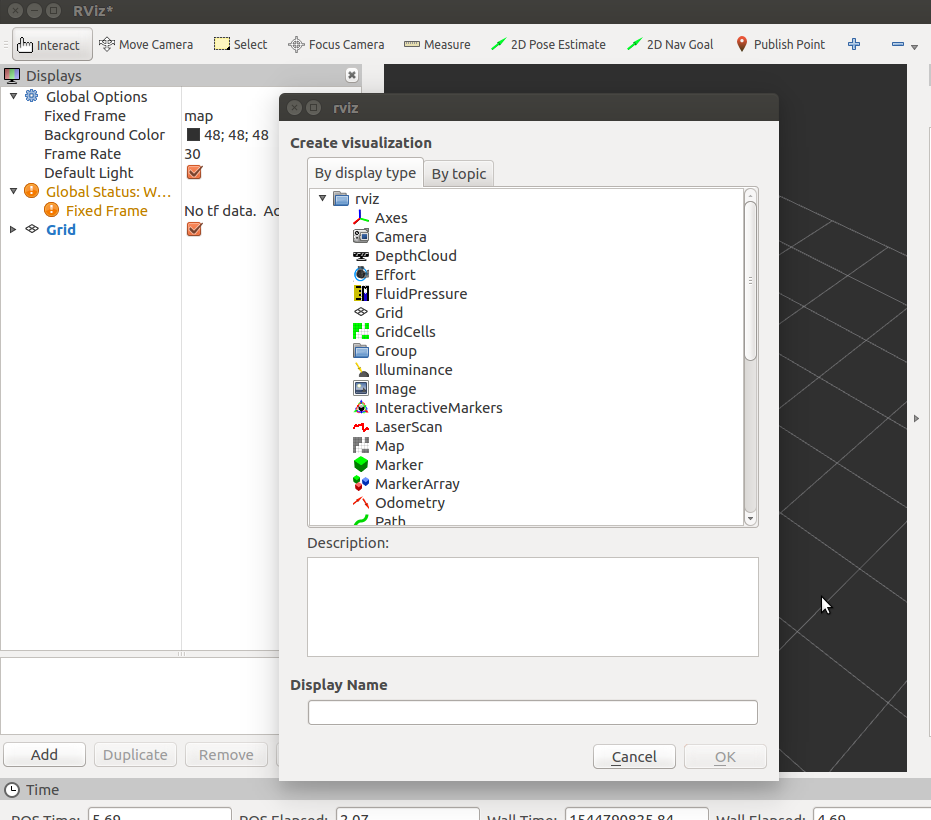
/rrbot/camera1/image_raw
ardupilot_gazebo仿真(二)的更多相关文章
- ardupilot_gazebo仿真(四)
ardupilot_gazebo仿真(四) 标签(空格分隔): 未分类 Multi-MAV simulation 参考官网给出的multi-vehicle-simulation的方法 在每次打开sim ...
- ardupilot_gazebo仿真(三)
ardupilot_gazebo仿真(三) 标签(空格分隔): 未分类 创建ROS node 实现对无人机的控制(软件在环) MAVROS MAVROS是ROS中的一个能够连接支持MAVLink地面站 ...
- ardupilot_gazebo仿真(一)
ardupilot_gazebo仿真 标签(空格分隔): 未分类 ardupilot_gazebo仿真 官网网址 代码更新地址 Ardupilot Gazebo Plugin & Models ...
- vivado与modelsim的联合仿真(二)
最近在做Zynq的项目,曾经尝试使用ISE+PlanAhead+XPS+SDK组合和Vivado+SDK来搭建工程,使用中发现前者及其不方便后者有诸多不稳定.近期得闻Xilinx退出Vivado20 ...
- MFC框架仿真<二>
- iOS开发——高级篇——UIDynamic 物理引擎
一.UIDynamic 1.简介什么是UIDynamicUIDynamic是从iOS 7开始引入的一种新技术,隶属于UIKit框架可以认为是一种物理引擎,能模拟和仿真现实生活中的物理现象重力.弹性碰撞 ...
- ARM开发(3)基于STM32的矩阵键盘控制蜂鸣器
一 矩阵键盘控制蜂鸣器原理: 1.1 本实验实现8*7矩阵键盘上按键控制蜂鸣器响. 1.2 实验思路:根据电路图原理,找出矩阵键盘行列所对应的引脚,赋予对应的按键值,然后控制蜂鸣器响. 1.3 ...
- ARM开发(2)基于STM32的蜂鸣器
基于STM32的蜂鸣器 一 蜂鸣器原理: 1.1 本实验实现1个蜂鸣器间隔1S鸣叫. 1.2 实验思路:根据电路图原理,给蜂鸣器相关引脚赋予高低电平,实现电路的导通,使蜂鸣器实现鸣叫或不鸣. 1 ...
- ARM开发(1) 基于STM32的LED跑马灯
一 跑马灯原理: 1.1 本实验实现2个led的跑马灯效果,即2个led交替闪烁. 1.2 实验思路:根据电路图原理,给led相关引脚赋予高低电平,实现电路的导通,使led灯发光. 1.3 开发 ...
随机推荐
- Android学习笔记_35_PopupWindow泡泡窗口的实现及GridView应用
1.PopupWindow是一个可以显示在当前Activity之上的浮动容器,PopupWindow弹出的位置是能够改变的,按照有无偏移量,可以分为无偏移和有便宜两种:按照参照对象的不同又可以分为两种 ...
- nodejs如果npm install express -g远程安装费时
npm install -g cnpm --registry= https://registry.npm.taobao.org
- 12 个强大的 Chrome 插件扩展
Chrome功能强大,也得益于其拥有丰富的扩展资源库.Chrome Web Store里有各种各样的插件,可以满足你使用Chrome时的各种要求.和Firefox一样,Chrome的扩展非常容易安装, ...
- ADO.NET 之 Entity Framework 基础
Entity Framework(EF)是使用直接映射到应用程序中业务对象的对象模型于关系数据库进行交互.它没有将数据视为行和列的集合,而是将其视为强类型对象(成为实体)的集合. 术语:LinQ to ...
- iOS之UITableView中的cell因为重用机制导致新的cell的数据出现重复或者错乱
UITableView中的cell可以有很多,一般会通过重用cell来达到节省内存的目的:通过为每个cell指定一个重用标识符(reuseIdentifier),即指定了单元格的种类,当cell滚 ...
- POJ 2318--TOYS(二分找点,叉积判断方向)
TOYS Time Limit: 2000MS Memory Limit: 65536K Total Submissions: 17974 Accepted: 8539 Description ...
- 【TOJ 3660】家庭关系(hash+并查集)
描述 给定若干家庭成员之间的关系,判断2个人是否属于同一家庭,即2个人之间均可以通过这些关系直接或者间接联系. 输入 输入数据有多组,每组数据的第一行为一个正整数n(1<=n<=100), ...
- vsftpd文件服务参数汇总和虚拟用户使用
FTP文件传输协议 FTP协议特点 基于C/S结构 双通道协议:数据和命令连接 数据传输格式:二进制(默认)和文本(w文本格式会修改文件内容) 两种模式:服务器角度 主动(PORT style):服务 ...
- Axure RP Extension for Chrome安装
Axure RP Extension for Chrome安装 Axure RP Extension for Chrome是一款谷歌插件,主要可以用来查看原型文件.以前安装插件的时候总是找半天资源,很 ...
- QQ群技术:0成本创建2000人QQ群技巧
群人数,直接关系群权重;于排名,意义非凡;此法靠谱,笔者亲测. 就说这张图,这类关键词,要是没2000人群,不管你多流弊,你是做不上去滴. 于QQ群霸屏,笔者有太多的笔墨,各种排名技巧,阿力推推早前明 ...