OpenCV学习(30) 轮廓defects
上一篇教程中,我们学习了如何计算轮廓的凸包,其实对一个轮廓而言,可能它的凸包和它本身是重合的,也有可能不是重合的。比如下面左边图像的轮廓本身就是凸包,而右边图像的轮廓则不是。我们可以通过函数bool isContourConvex(InputArray contour),来判定一个轮廓是否是凸包,是的话返回true,否则false[注意测试的轮廓必须是简单轮廓,没有自交叉之类的]。
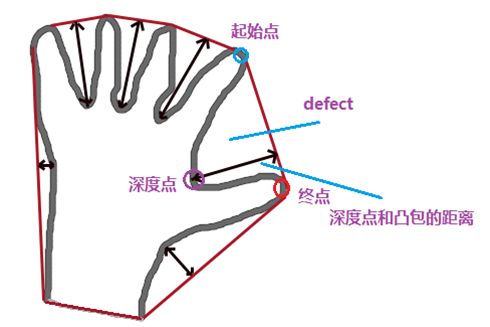
对一个非凸包的轮廓而言,它包括一系列的凹陷区域,这些区域称作defect,比如下面手轮廓中,包括6个defect区域。在OpenCV中,我们用下面的结构来定义defect。
struct CvConvexityDefect { CvPoint* start; // 轮廓中defect的起点 CvPoint* end; // 轮廓中defect的终点 CvPoint* depth_point; // defect中到凸包最远的点 float depth; // 最远点和凸包之间的距离};
在OpenCV中,我们通过函数
void convexityDefects(InputArray contour, InputArray convexhull, OutputArray convexityDefects)
得到轮廓的凸包,其中第一个参数和第二个参数是轮廓以及轮廓对应的凸包,注意凸包应该使用vector<int>这样的索引方式表示。第三个参数为返回的defect点集。
下面我们看下检测轮廓defects的代码:
#include "opencv2/highgui/highgui.hpp"
#include "opencv2/imgproc/imgproc.hpp"
#include <iostream>
#include <stdio.h>
#include <stdlib.h> using namespace cv;
using namespace std; Mat src; Mat src_gray;
RNG rng(12345); int main( int argc, char** argv )
{
//装入图像
src = imread("../hand1.jpg", 1 ); //转化为灰度图像
cvtColor( src, src_gray, CV_BGR2GRAY );
//blur( src_gray, src_gray, Size(3,3) );
namedWindow( "image");
imshow( "image", src_gray ); Mat threshold_output;
vector<vector<Point> > contours;
vector<Vec4i> hierarchy; //得到二值图
threshold( src_gray, threshold_output, 200, 255, THRESH_BINARY ); //查找轮廓
findContours( threshold_output, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );
printf("轮廓数目:%d\n", contours.size());
/// Find the convex hull object for each contour
vector<vector<Point> >hull( contours.size() );
for( int i = 0; i < contours.size(); i++ )
{ convexHull( Mat(contours[i]), hull[i], false ); } /// Draw contours + hull results
Mat drawing = Mat::zeros( threshold_output.size(), CV_8UC3 );
int area = 0; //轮廓索引
int k = 0;
int i;
for(i = 0; i< contours.size(); i++ )
{
Scalar color1 = Scalar( rng.uniform(0, 255), rng.uniform(0,255), rng.uniform(0,255) );
drawContours( drawing, contours, i, color1, 1, 8, vector<Vec4i>(), 0, Point() );
Scalar color2 = Scalar( rng.uniform(0, 255), rng.uniform(0,255), rng.uniform(0,255) );
drawContours( drawing, hull, i, color2, 1, 8, vector<Vec4i>(), 0, Point() );
int tt = contourArea(contours[i]);
printf("轮廓面积%d = %d\n", i, tt);
if( tt > area)
{
area = contourArea(contours[i]);
k = i;
} } vector<Point> hull1;
hull1 = hull[1];
for(i = 0; i< hull1.size(); i++ )
{
printf("point %d, %d, %d\n", i, hull1[i].x, hull1[i].y);
circle(drawing, hull1[i], 6, Scalar(255,0,0), 3, CV_AA);
} int j;
for(j=0; j< contours.size(); j++)
{
//如果没有defects或者轮廓小于三个点,则continue
if( isContourConvex(contours[j])|| contours[j].size()<3) continue; vector<int> convexHull_IntIdx;
vector<Vec4i> defects;
if (contours[j].size() >3 )
{
convexHull(contours[j], convexHull_IntIdx, true);
convexityDefects(contours[j], convexHull_IntIdx, defects);
} for(i=0;i < defects.size();++i)
{
Matx<int,4,1> defectVector = defects[i];
vector<Point> contours1 =contours[j];
Point point1 = contours1[defectVector.val[0]];//开始点
Point point2 = contours1[defectVector.val[1]];//结束点
Point point3 = contours1[defectVector.val[2]];//深度点
float dist = defectVector.val[3];
printf("dist: %f \n", dist);
//if ( defectVector.val[3] <= 1000 ) { continue; } // skip defects that are shorter than 100 pixel
circle(drawing, point1, 3, Scalar(255,255,0), 2, CV_AA);
circle(drawing, point2, 8, Scalar(0,255,0), 2, CV_AA);
circle(drawing, point3, 3, Scalar(0,255,255), 2, CV_AA); }
}
/// Show in a window
namedWindow( "Hull demo");
imshow( "Hull demo", drawing ); waitKey(0);
return(0);
}
程序执行之后界面如下,注意左下有图中
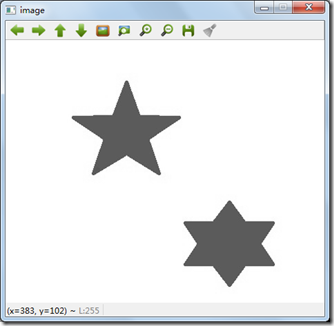
程序代码:工程FirstOpenCV25
OpenCV学习(30) 轮廓defects的更多相关文章
- OpenCV学习(28) 轮廓
OpenCV中可以方便的在一副图像中检测到轮廓,并把这些轮廓画出来.主要用到两个函数:一个是findContours( img, contours0, hierarchy, RETR_TREE, CH ...
- OpenCV学习(33) 轮廓的特征矩Moment
在OpenCV中,可以很方便的计算多边形区域的3阶特征矩,opencv中的矩主要包括以下几种:空间矩,中心矩和中心归一化矩. class Moments { public: ...... // 空间矩 ...
- OpenCV学习(31) 基于defects的简单手势
前几年在做毕业设计时候曾用opencv1.0中defects做过简单的手势识别,这几天看OpenCV2.46中的轮廓函数,发现和以前差别挺大,函数调用完全不一样,重新实现了简单手势的代码. 1.首先用 ...
- opencv学习笔记(二)寻找轮廓
opencv学习笔记(二)寻找轮廓 opencv中使用findContours函数来查找轮廓,这个函数的原型为: void findContours(InputOutputArray image, O ...
- OpenCV 学习笔记03 边界框、最小矩形区域和最小闭圆的轮廓
本节代码使用的opencv-python 4.0.1,numpy 1.15.4 + mkl 使用图片为 Mjolnir_Round_Car_Magnet_300x300.jpg 代码如下: impor ...
- OpenCV学习笔记(27)KAZE 算法原理与源码分析(一)非线性扩散滤波
http://blog.csdn.net/chenyusiyuan/article/details/8710462 OpenCV学习笔记(27)KAZE 算法原理与源码分析(一)非线性扩散滤波 201 ...
- OpenCV 学习笔记 07 目标检测与识别
目标检测与识别是计算机视觉中最常见的挑战之一.属于高级主题. 本章节将扩展目标检测的概念,首先探讨人脸识别技术,然后将该技术应用到显示生活中的各种目标检测. 1 目标检测与识别技术 为了与OpenCV ...
- OpenCV 学习笔记03 凸包convexHull、道格拉斯-普克算法Douglas-Peucker algorithm、approxPloyDP 函数
凸形状内部的任意两点的连线都应该在形状里面. 1 道格拉斯-普克算法 Douglas-Peucker algorithm 这个算法在其他文章中讲述的非常详细,此处就详细撰述. 下图是引用维基百科的.ε ...
- OpenCV 学习笔记03 boundingRect、minAreaRect、minEnclosingCircle、boxPoints、int0、circle、rectangle函数的用法
函数中的代码是部分代码,详细代码在最后 1 cv2.boundingRect 作用:矩形边框(boundingRect),用于计算图像一系列点的外部矩形边界. cv2.boundingRect(arr ...
随机推荐
- iconfont 在项目中的简单使用
font-class引用 font-class是unicode使用方式的一种变种,主要是解决unicode书写不直观,语意不明确的问题. 与unicode使用方式相比,具有如下特点: 兼容性良好,支持 ...
- 开始Hibernate介绍
1.介绍 一个框架 一个Java领域内的持久化框架 一个ORM框架 2.持久化 和数据库相关的各种操作 保存 更新 删除 查询 加载:根据特定的OID,把一个对象从数据库加载到你内存中. OID:为了 ...
- GPS数据包格式及数据包解析
GPS数据包解析 GPS数据包解析 目的 GPS数据类型及格式 数据格式 数据解释 解析代码 结构体定义 GPRMC解析函数 GPGGA解析函数 测试样例输出 gps数据包格式 gps数据解析 车联网 ...
- poj-1251-最小生成树
title: poj-1251-最小生成树 date: 2018-11-20 16:38:14 tags: acm 刷题 categories: ACM-最小生成树 概述 前段时间数据结构的课上提到了 ...
- 图解在Eclipse中如何上传项目到svn
方法/步骤 1.在Eclipse中新建project,如下图所示: 2.右键project --> team --> share project,如下图所示: 3.选择repository ...
- [HDU6155]Subsequence Count
题目大意: 给定一个01序列,支持以下两种操作: 1.区间反转: 2.区间求不同的子序列数量. 思路: 首先我们考虑区间反转,这是一个经典的线段树操作. 接下来考虑求不同的子序列数量,在已知当前区间的 ...
- 每一个JavaScript开发者应该了解的浮点知识
在JavaScript开发者的开发生涯中的某些点,总会遇到奇怪的BUG——看似基础的数学问题,但却又觉得有些不对劲.总有一天,你会被告知JavaScript中的数字实际上是浮点数.试图了解浮点数和为什 ...
- Problem H: 深入浅出学算法009-韩信点兵
Description 秦朝末年,楚汉相争.有一次,韩信将1500名将士与楚王大将李锋交战.苦战一场,楚军不敌,败退回营,汉军也死伤四五百人,于是,韩信整顿兵马也返回大本营.当行至一山坡,忽有后军来报 ...
- 90. 子集 II
90. 子集 II 题意 给定一个可能包含重复元素的整数数组 nums,返回该数组所有可能的子集(幂集). 说明:解集不能包含重复的子集. 示例: 输入: [1,2,2]输出:[ [2], [1], ...
- word-ladder总结
title: word ladder总结 categories: LeetCode tags: 算法 LeetCode comments: true date: 2016-10-16 09:42:30 ...