[Luogu4724][模板]三维凸包(增量构造法)
1.向量点积同二维,x1y1+x2y2+x3y3。向量叉积是行列式形式,(y1z2-z1y2,z1x2-x1z2,x1y2-y1x2)。
2.增量构造法:
1)首先定义,一个平面由三个点唯一确定。一个平面是有方向的,它的法向量只有一个方向(即逆时针相邻两向量的叉积的方向)。
2)初始时只有(p1,p2,p3)和(p3,p2,p1)两个平面(相当于两个方向相反的面组成了一个体积为0的凸包)
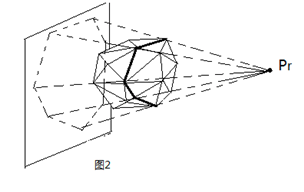
3)每次加入一个新点时,以这个点为光源中心投影到凸包上,不能被照到的面在新凸包中仍然存在,否则不存在。
4)将新点和明暗分界线上的边组成的面加入凸包。
3.具体实现:
1)一个面是否能被照到的判断:点在这个面的正面,即平面上任意一点到这个点的向量与平面法向量的点积为正值。
2)明暗分界线的判断:每次判断一个面能否被照到时,标记vis[p1][p2]表示p1p2这条边的某边是否被照到。若vis[p1][p2]!=vis[p2][p1]则说明它是分界线。
3)三位面积计算:两个向量作三维叉积后将模长除2即可。

4.精度问题:
精度是计几永恒不变的话题。
考虑四点共面的情况,在上述做法中,加入其中三个点组成的平面后,第四个点会因为找不到这个平面而被忽略,事实上第四个点可能会增加这个面的面积。
为了避免这种情况,我们将每个点都作一些微小的“扰动”,这样就几乎不可能有四点共面的情况。同时,这个扰动幅度不能过大,不能影响到输出要求的精度。
但是同时,由于这种扰动,如果输入数据中有多个相同的点,在扰动幅度设的不好的情况下,会因为精度误差使所有坐标相同的点全部被认为使不同的点,从而导致凸包面数指数型增长。
实测扰动范围在1e-8左右可以同时一定程度上有效避免这两个问题,但一定也能被卡掉。也就是说网上大部分代码是可以轻松被卡掉的。具体应该怎么做才能避免精度问题感觉十分困难。
#include<cmath>
#include<cstdio>
#include<algorithm>
#define rep(i,l,r) for (int i=(l); i<=(r); i++)
using namespace std; const int N=;
const double eps=1e-;
double ans;
int n,cnt,tot;
bool vis[N][N];
double rs() {return (rand()/(double)RAND_MAX-0.5)*eps;} struct P{ double x,y,z; }p[N];
double len(P a){ return sqrt(a.x*a.x+a.y*a.y+a.z*a.z); }
void shake(P &a){ a.x+=rs(); a.y+=rs(); a.z+=rs(); }
P operator -(const P &a,const P &b){ return (P){a.x-b.x,a.y-b.y,a.z-b.z}; }
P operator *(const P &a,const P &b){ return (P){a.y*b.z-a.z*b.y,a.z*b.x-a.x*b.z,a.x*b.y-a.y*b.x}; }
double mul(const P &a,const P &b){ return a.x*b.x+a.y*b.y+a.z*b.z; } struct F{ int v[]; }f[N],tmp[N];
P Normal(F &a){ return (p[a.v[]]-p[a.v[]])*(p[a.v[]]-p[a.v[]]); }
double area(F &a){ return len(Normal(a))/.; }
bool see(F &a,P &b){ return mul(b-p[a.v[]],Normal(a))>; } void Convex(){
f[++tot]=(F){,,}; f[++tot]=(F){,,};
rep(i,,n){
int tot1=;
rep(j,,tot){
bool fl=see(f[j],p[i]);
if (!fl) tmp[++tot1]=f[j];
rep(k,,) vis[f[j].v[k]][f[j].v[(k+)%]]=fl;
}
rep(j,,tot) rep(k,,){
int x=f[j].v[k],y=f[j].v[(k+)%];
if (vis[x][y] && !vis[y][x]) tmp[++tot1]=(F){x,y,i};
}
tot=tot1; rep(j,,tot1) f[j]=tmp[j];
}
} int main(){
scanf("%d",&n);
rep(i,,n) scanf("%lf%lf%lf",&p[i].x,&p[i].y,&p[i].z),shake(p[i]);
Convex();
rep(i,,tot) ans+=area(f[i]); printf("%.3lf\n",ans);
return ;
}
[Luogu4724][模板]三维凸包(增量构造法)的更多相关文章
- BZOJ1209 最佳包裹 (三维凸包 增量法)
题意 求三维凸包的表面积. N≤100N\le100N≤100 题解 暴力往当前的凸包里加点.O(n2)O(n^2)O(n2).题解详见大佬博客 扰动函数shakeshakeshake是为了避免四点共 ...
- luogu P4724 模板 三维凸包
LINK:三维凸包 一个非常古老的知识点.估计也没啥用. 大体上了解了过程 能背下来就背下来吧. 一个bf:暴力枚举三个点 此时只需要判断所有的点都在这个面的另外一侧就可以说明这个面是三维凸包上的面了 ...
- Luogu 4724 三维凸包
Luogu 4724 三维凸包 增量法,维护当前凸包,每次加入一个点 \(P\) ,视其为点光源,将可见面删去,新增由"晨昏线"(分割棱)与 \(P\) 构成的平面. 注意每个平面 ...
- hdu4266(三维凸包模板题)
/*给出三维空间中的n个顶点,求解由这n个顶点构成的凸包表面的多边形个数. 增量法求解:首先任选4个点形成的一个四面体,然后每次新加一个点,分两种情况: 1> 在凸包内,则可以跳过 2> ...
- POJ3528 HDU3662 三维凸包模板
POJ3528 HDU3662 第一道题 给定若干点 求凸包的表面积,第二题 给定若干点就凸包的面数. 简单说一下三维凸包的求法,首先对于4个点假设不共面,确定了唯一四面体,对于一个新的点,若它不在四 ...
- 题解-洛谷P4724 【模板】三维凸包
洛谷P4724 [模板]三维凸包 给出空间中 \(n\) 个点 \(p_i\),求凸包表面积. 数据范围:\(1\le n\le 2000\). 这篇题解因为是世界上最逊的人写的,所以也会有求凸包体积 ...
- POJ 3528--Ultimate Weapon(三维凸包)
Ultimate Weapon Time Limit: 2000MS Memory Limit: 131072K Total Submissions: 2430 Accepted: 1173 ...
- BZOJ1209 [HNOI2004]最佳包裹 三维凸包 计算几何
欢迎访问~原文出处——博客园-zhouzhendong 去博客园看该题解 题目传送门 - BZOJ1209 题目概括 给出立体的n个点.求三维凸包面积. 题解 增量法,看了一天,还是没有完全懂. 上板 ...
- POJ 2225 / ZOJ 1438 / UVA 1438 Asteroids --三维凸包,求多面体重心
题意: 两个凸多面体,可以任意摆放,最多贴着,问他们重心的最短距离. 解法: 由于给出的是凸多面体,先构出两个三维凸包,再求其重心,求重心仿照求三角形重心的方式,然后再求两个多面体的重心到每个多面体的 ...
随机推荐
- lucene总结——(十七)
(01)rownum和rowid有何区别? rownum在表结构中是看不见的,只能在select中明确写出rownum方可显示 rownum与不同的表绑定在一起,每张表都有自已的r ...
- Python标准库笔记(6) — struct模块
该模块作用是完成Python数值和C语言结构体的Python字符串形式间的转换.这可以用于处理存储在文件中或从网络连接中存储的二进制数据,以及其他数据源. 用途: 在Python基本数据类型和二进制数 ...
- openjudge-NOI 2.5-1700 八皇后问题
题目链接:http://noi.openjudge.cn/ch0205/1700/ 题解: 经典深搜题目…… #include<cstdio> ][]; int num; void pri ...
- Add custom daemon on Linux System
Ubuntu add custom service(daemon) Task 需要在系统启动的时候自动启动一个服务(后台程序),在系统关闭的时候关闭服务. 比如在部署某个应用之前,需要将某个任务设置成 ...
- js对金额浮点数运算精度的处理方案
浮点数产生的原因 浮点数转二进制,会出现无限循环数,计算机又对无限循环小数进行舍入处理 js弱语言的解决方案 方法一: 指定要保留的小数位数(0.1+0.2).toFixed(1) = 0.3;这个方 ...
- angular4.0和angularJS、react.js、vue.js的简单比较
angularJS特性 模板功能强大丰富(数据绑定大大减少了代码量) 比较完善的前端MVC框架(只要学习这个框架,按照规定往里面填东西就可以完成前端几乎所有的的问题) 引入了Java的一些概念 ang ...
- SQL行列转换的另一种方法
create table tb(姓名 varchar(10) , 课程 varchar(10) , 分数 int)insert into tb values('张三' , '语文' , 74)inse ...
- LeetCode828. Unique Letter String
https://leetcode.com/problems/unique-letter-string/description/ A character is unique in string S if ...
- 在EC2上创建root用户,并使用root用户登录
今天开始研究亚马逊的云主机EC2,遇到了一个问题,我需要在EC2上安装tomcat,但是yum命令只能是root用户才可以运行,而EC2默认是以ec2-user用户登录的,所以需要切换到root用户登 ...
- Java之反转排序
顾名思义,反转排序就是以相反的顺序把原来的数组内容重新进行排序.反转排序算法在我们的程序开发中也是经常用到的.而反转排序的基本思想也很简单,就是把数组最后一个元素与第一个元素进行交换,倒数第二个与第二 ...