李航-统计学习方法-笔记-3:KNN
KNN算法
基本模型:给定一个训练数据集,对新的输入实例,在训练数据集中找到与该实例最邻近的k个实例。这k个实例的多数属于某个类,就把输入实例分为这个类。
KNN没有显式的学习过程。
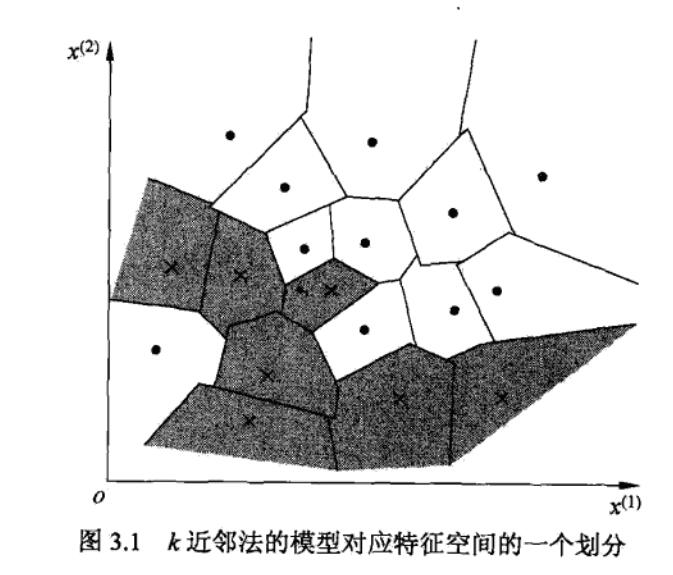
KNN使用的模型实际上对应于特征空间的划分。特征空间中,对每个训练实例点\(x_i\),距离该点比其它点更近的所有点组成一个区域,叫作单元(cell)。每个训练实例拥有一个单元。所有的训练实例点的单元构成对特征空间的一个划分。如下图所示。
三要素:KNN模型由三个基本要素——距离度量,K值选择,分类决策决定。当三要素和训练集确定后,对任何一个新的输入实例,它所属的类唯一地确定。
KNN三要素之1——距离度量
由不同的距离度量所确定的最近邻点是不同的。
KNN的特征空间一般是n维实数向量空间\(R^n\),使用的距离是欧氏距离。但也可以是其他距离,如更一般的\(L_p\)距离。设\(x_i\)为第\(i\)个样本,\(n\)维向量,\(x_i = (x_i^{(1)}, x_i^{(2)}, ..., x_i^{(n)})^T\),则
\[L_p(x_i, x_j) = (\sum_{l=1}^{n} |\ x_i^{(l)} - x_j^{(l)}\ |^{\ p})^{\frac{1}{p}}, p \geqslant 1 \\
L_\infty(x_i, x_j) = \max_{l} |x_i^{(l)} - x_j^{(l)}|\]
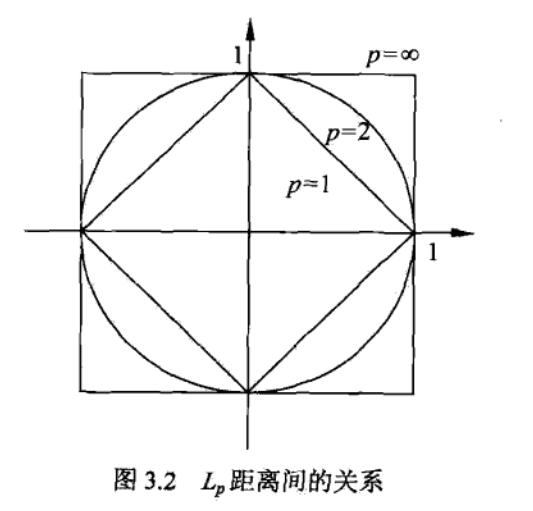
\(p=2\)时称为欧式距离,\(p=1\)称为曼哈顿距离。下图是二维空间中,与原点的\(L_p\)距离为1的图形。
\(p=1\)时,\(|x| + |y| = 1\)
\(p=2\)时,\(x^2 + y^2 = 1\)
\(p=\infty\)时,\(\max(|x|, |y|) = 1\)
KNN三要素之2——K值选择
K值的选择会对KNN结果产生重大影响
选择较小的K值:
如果选择较小的K值,相当于用较小的邻域中的训练实例进行预测,只有与输入实例较近的训练实例才会对预测结果起作用。“学习”的近似误差会减小。
缺点是“学习”的估计误差会增大,预测结果对近邻的实例点非常敏感。如果邻近的实例点恰巧是噪声,预测就会出错。
K值的减小意味着整体模型变得复杂,容易发生过拟合。
选择较大的K值:
如果选择较大的K值,相当于用较大邻域中的训练实例进行预测。其优点是减小学习的估计误差,缺点是近似误差会增大。这时离输入实例较远的训练实例起预测作用,使预测发生错误。
K值的增大意味着整体模型变得简单。K=N时,无论输入实例是什么,都将简单地预测它属于在训练实例中最多的类,这时模型过于简单,完全忽略训练实例中的大量有用信息,是不可取的。
在应用中:
K值一般取一个比较小的数值,通常采用交叉验证法来选取最优的K值。
KNN三要素之3——分类决策规则
KNN的分类决策规则往往是多数表决,即由输入实例的K个邻近的训练实例中的多数类决定输入实例的类。
KNN的实现:kd树
kd树:KNN最简单的实现方法是线性扫描。这时要计算输入实例与每一个训练实例的距离。当训练集很大时,计算非常耗时,这种方法是不可行的。
为了提高KNN搜索的效率,可以考虑使用特殊的结构存储训练数据,以减少计算距离的次数。具体方法很多,下面介绍其中的kd树方法。
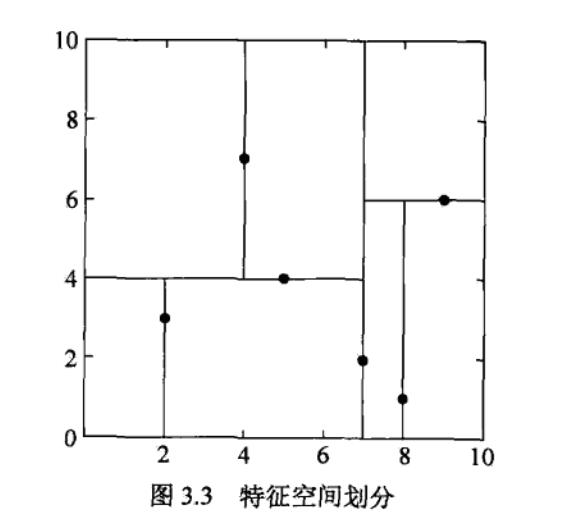
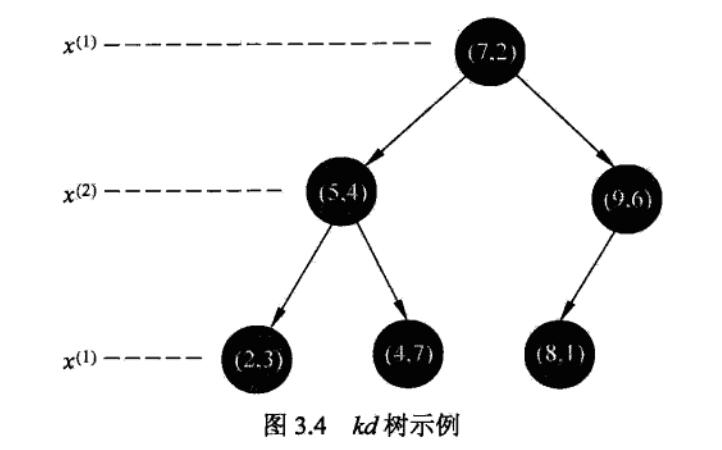
构造kd树:kd树是一种对k维空间中的实例点进行存储以便对其进行快速检索的树形数据结构。kd树是二叉树,表示对k维空间的一个划分。构造kd树相当于不断地用垂直于坐标轴的超平面将k维空间切分,构成一系列的k维超矩形区域。kd树的每个结点对应于一个k维超矩形区域。
通常,依次选择坐标轴对空间切分,选择训练实例点在选定坐标轴上的中位数为切分点,这样得到的kd树是平衡的。注意,平衡的kd树搜索时的效率未必是最优的。
算法3.2 (构造平衡kd树)
输入:k维空间数据集\(T = \{x_1, x_2, ..., x_N\}\),其中\(x_i = (x_i^{(1)}, x_i^{(2)}, ..., x_i^{(k)})^T\),\(i = 1, 2, ..., N\);
输出:kd树
(1)开始:构造根结点,根结点对应于包含\(T\)的k维空间的超矩阵区域。
选择\(x^{(1)}\)为坐标轴,以\(T\)中所有实例的\(x^{(1)}\)坐标的中位数为切分点,将根结点对应的超矩形区域切分为两个子区域。切分由通过切分点并与坐标轴\(x^{(1)}\)垂直的超平面实现。
由根结点生成的深度为1的左右子结点:左结点对应坐标\(x^{(1)}\)小于切分点的子区域,右结点对应坐标\(x^{(1)}\)大于切分点的子区域。将落在切分超平面上的实例点保存在根结点。
(2)重复:对深度为\(j\)的结点,选择\(x^{(j)}\)为切分的坐标轴,\(l = j(mod \ k) + 1\),以该结点的区域中所有实例的\(x^{(l)}\)坐标的中位数为切分点。
由该结点生成深度为\(j+1\)的左右子结点:左结点对应坐标\(x^{(l)}\)小于切分点的子区域,右结点对应坐标\(x^{(l)}\)大于切分点的子区域。将落在切分超平面上的实例点保存在该结点。
(3)直到两个子区域没有实例存在时停止,从而形成kd树的区域划分。
搜索kd树:利用kd树可以省去对大部分数据点的搜索,从而减少搜索的计算量。这里以最近邻为例加以叙述。
算法3.3 (用kd树的最近邻搜索)
输入:已构造的kd树;目标点x;
输出:x的最近邻
(1)从根结点出发,递归地向下访问kd树。若目标点x当前维的坐标小于切分点的坐标,则左移,否则右移,直到子结点为叶结点。
(2)以此叶结点为“当前最近点”。
(3)递归向上回退,在每个结点进行以下操作:
(a)若该结点保存的实例点比“当前最近点”离目标点更近,则以该实例点为“当前最近点”。
(b)检查另一子结点对应的区域是否与“以目标点为球心,以目标前与‘当前最近点’的距离为半径的超球体”相交。
如果相交,可能在另一子结点对应的区域内存在距离目标点更近的点,移动到另一结点,递归搜索。
如果不相交,向上回退。
(4)回退到根结点时,搜索结束。最后的“当前最近点”即为x的最近邻点。
李航-统计学习方法-笔记-3:KNN的更多相关文章
- 统计学习方法笔记(KNN)
k近邻法(k-nearest neighbor,k-NN) 输入:实例的特征向量,对应于特征空间的点:输出:实例的类别,可以取多类. 分类时,根据其k个最近邻的训练实例的类别,通过多数表决等方式进行预 ...
- 统计学习方法笔记 -- KNN
K近邻法(K-nearest neighbor,k-NN),这里只讨论基于knn的分类问题,1968年由Cover和Hart提出,属于判别模型 K近邻法不具有显式的学习过程,算法比较简单,每次分类都是 ...
- 统计学习方法笔记--EM算法--三硬币例子补充
本文,意在说明<统计学习方法>第九章EM算法的三硬币例子,公式(9.5-9.6如何而来) 下面是(公式9.5-9.8)的说明, 本人水平有限,怀着分享学习的态度发表此文,欢迎大家批评,交流 ...
- 李航统计学习方法——算法2k近邻法
2.4.1 构造kd树 给定一个二维空间数据集,T={(2,3),(5,4),(9,6)(4,7),(8,1),(7,2)} ,构造的kd树见下图 2.4.2 kd树最近邻搜索算法 三.实现算法 下面 ...
- 统计学习方法笔记 Logistic regression
logistic distribution 设X是连续随机变量,X服从逻辑斯谛分布是指X具有下列分布函数和密度函数: 式中,μ为位置参数,γ>0为形状参数. 密度函数是脉冲函数 分布函数是一条S ...
- 统计学习方法笔记 -- Boosting方法
AdaBoost算法 基本思想是,对于一个复杂的问题,单独用一个分类算法判断比较困难,那么我们就用一组分类器来进行综合判断,得到结果,"三个臭皮匠顶一个诸葛亮" 专业的说法, 强可 ...
- 李航统计学习方法(第二版)(六):k 近邻算法实现(kd树(kd tree)方法)
1. kd树简介 构造kd树的方法如下:构造根结点,使根结点对应于k维空间中包含所有实例点的超矩形区域;通过下面的递归方法,不断地对k维空间进行切分,生成子结点.在超矩形区域(结点)上选择一个坐标轴和 ...
- 李航统计学习方法(第二版)(五):k 近邻算法简介
1 简介 k近邻法的输入为实例的特征向量,对应于特征空间的点;输出为实例的类别,可以取多类.k近邻法假设给定一个训练数据集,其中的实例类别已定.分类时,对新的实例,根据其k个最近邻的训练实例的类别,通 ...
- 李航统计学习方法(第二版)(十):决策树CART算法
1 简介 1.1 介绍 1.2 生成步骤 CART树算法由以下两步组成:(1)决策树生成:基于训练数据集生成决策树,生成的决策树要尽量大;(2)决策树剪枝:用验证数据集对己生成的树进行剪枝并选择最优子 ...
随机推荐
- mysql instr()函数
1)instr()函数的格式 (俗称:字符查找函数) 格式一:instr( string1, string2 ) / instr(源字符串, 目标字符串) 格式二:instr( strin ...
- 面试必备:Java 原子操作的实现原理[精品长文]
本文整理自<Java并发编程的艺术>第二章 作者:方腾飞 魏鹏 程晓明 原子(atomic)本意是“不能被进一步分割的最小粒子”,而原子操作(atomic operation)意为“不可被 ...
- Influx Sql系列教程九:query数据查询基本篇二
前面一篇介绍了influxdb中基本的查询操作,在结尾处提到了如果我们希望对查询的结果进行分组,排序,分页时,应该怎么操作,接下来我们看一下上面几个场景的支持 在开始本文之前,建议先阅读上篇博文: 1 ...
- idea2018.1.1版激活码到2020.7
N757JE0KCT-eyJsaWNlbnNlSWQiOiJONzU3SkUwS0NUIiwibGljZW5zZWVOYW1lIjoid3UgYW5qdW4iLCJhc3NpZ25lZU5hbWUiO ...
- 小程序云函数,解决接口https问题
本实例只是简单记录http请求 1,云函数如下 // 云函数入口函数 exports.main = async (event, context) => { let req = await got ...
- 通过命令窗口导入导出oracle数据库到dmp文件
通过命令窗口导入导出oracle数据库到dmp文件 很多时候我们需要备份Oracle的数据库,然后将数据导入其他数据库,因为有大文本字段会导致insert无法完全导出,只能导出为dmp文件,前提是wi ...
- 数组转JSON对象
代码: function arrayToJson(arr){ var js={}; for(var i=0;i<arr.length;i++){ js[arr[i].name]=arr[i].v ...
- (转)AS3正则:元子符,元序列,标志,数量表达符
(转)AS3正则:元子符,元序列,标志,数量表达符: AS3正则:元子符,元序列,标志,数量表达符 七月 4th, 2010 归类于 AS3前端技术 作者Linkjun 进行评论 as3正则:元子符, ...
- Spring Cloud Zuul路由规则动态更新
背景 Spring Cloud Zuul 作为微服务的网关,请求经过zuul路由到内部的各个service,由于存在着新增/修改/删除服务的路由规则的需求,zuul的路由规则的动态变更功能 提供了 ...
- Java线程synchronized(一)
线程安全概念:当多个线程访问某一个类(对象或方法)时,这个对象始终都能表现出正确的行为,那么这个类(对象或方法)就是线程安全的. synchronized:可以在任意对象及方法上加锁,而加锁的这段代码 ...