Multihypothesis Trajectory Analysis for Robust Visual Tracking
Multihypothesis Trajectory Analysis for Robust Visual Tracking
2019-10-27 14:33:49
Code: http://mcl.korea.ac.kr/research/object_tracking/dylee_cvpr2015/dylee_cvpr_2015_source_code.zip
Project page: http://mcl.korea.ac.kr/research/object_tracking/dylee_cvpr2015/
1. Background and Motivation:
本文提出使用多个轨迹假设的方法来进行跟踪,貌似也是首次将 trajectory 引入到跟踪中。该方法可以有效地考虑前后帧之间的关联。 用多个 tracker 去跑,然后设计度量公式,去选择轨迹片段。
2. STRUCK tracker:
本节对 STRUCK 跟踪算法进行了回归。
3. MTA Tracker:
作者这里通过通过对比前向跟踪结果与后向跟踪结果的差异性,来判断当前前向跟踪器的结果是否可靠。此外,作者采用多个前向跟踪器来提供多个轨迹假设。通过前向和后向分析,作者选择最好的 前向跟踪轨迹来改善跟踪的精确度和鲁棒性。
3.1 Multiple Component Trackers:
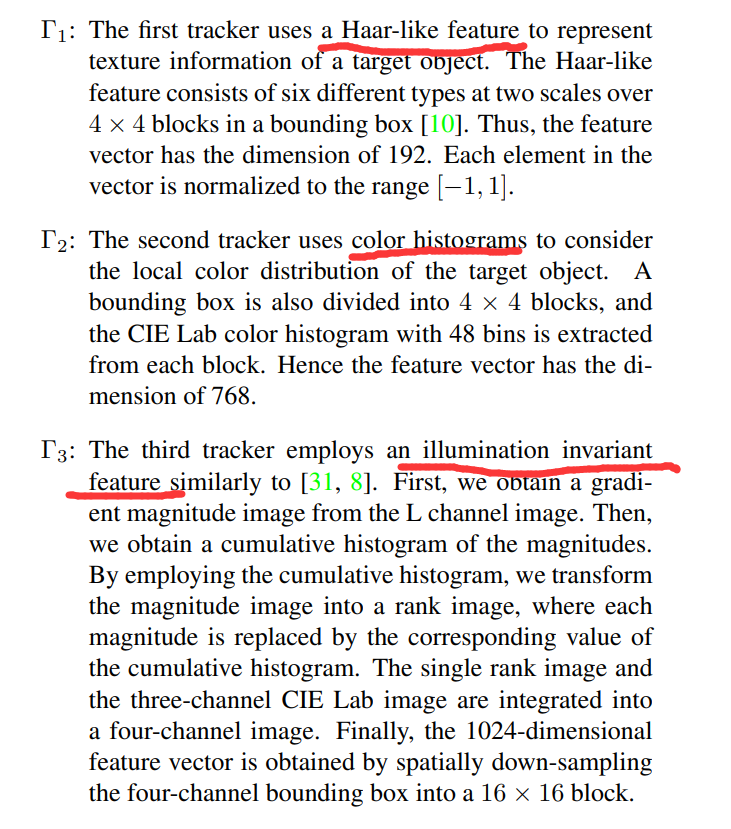
作者为同一个 tracker,输入不同的 feature,从而达到得到不同跟踪轨迹的目的。三条轨迹分别使用:Haar-like feature,Color histograms,Illumination invariant feature,具体细节如下所示:
为了衡量特征向量 u 和 v 之间的相似性,我们用交叉核(intersection kernel)来组合他们,得到:

3.2 Trajectory Analysis --- Robustness Score:
三个成分的跟踪器产生了三个轨迹假设。作者衡量每一个跟踪器的鲁棒性,然后选择当前时刻最优的作为最终的轨迹。
跟踪器鲁棒性得分的计算方法如下:
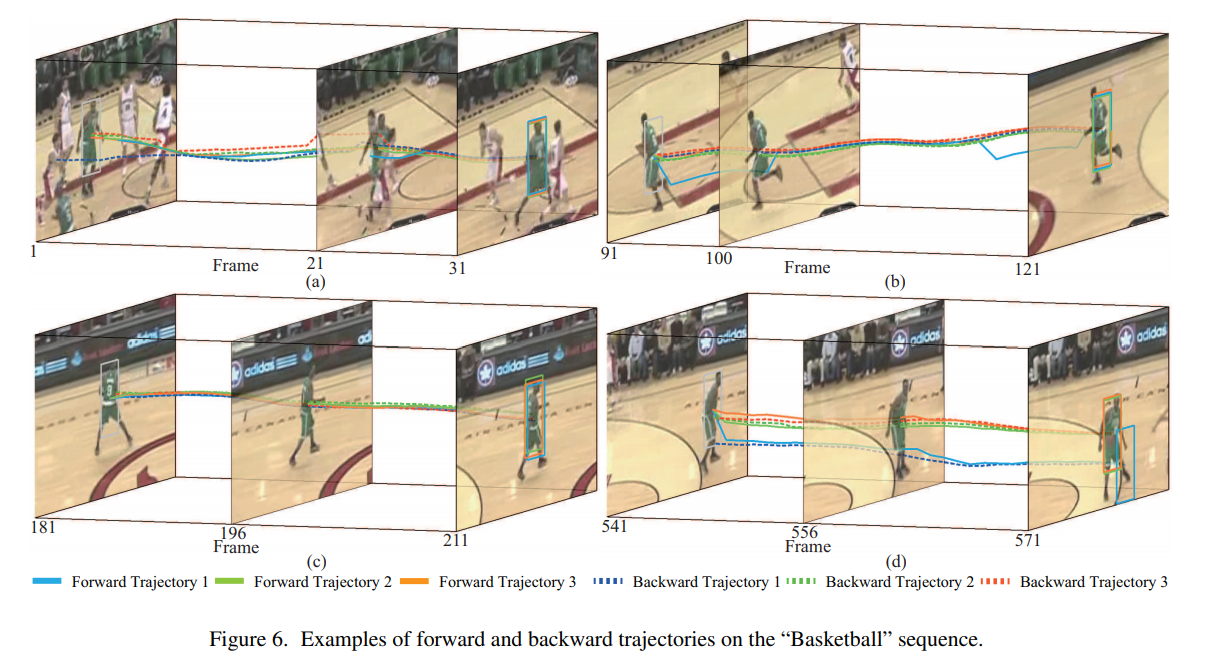
首先,从前些帧到当前帧,先用 tracker 进行跟踪,那么可以得到前向轨迹:

然后,在 frame t2 时刻的位置,我们初始化再初始化一个 tracker 进行后向的跟踪。后向轨迹如下:

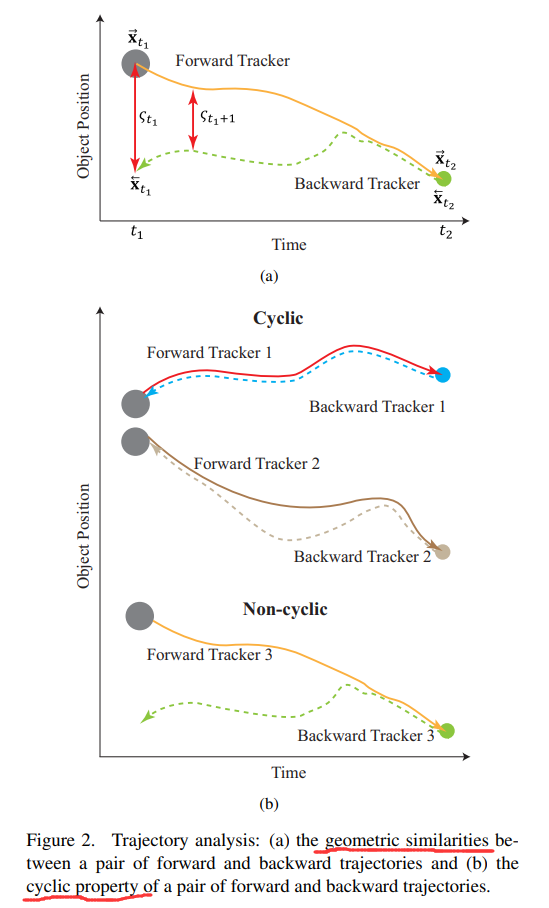
注意到,在间隔 [t1, t2] 的最后一帧 t2,我们有 作者用后向轨迹来检查前向轨迹的可靠性,但是采用三种不同的度量方式:geometric similarity, cyclic weight, and appearance similarity。如图 2 (a)所示,几何相似性得分如下:
作者用后向轨迹来检查前向轨迹的可靠性,但是采用三种不同的度量方式:geometric similarity, cyclic weight, and appearance similarity。如图 2 (a)所示,几何相似性得分如下:

利用的是前向位置 和 后向位置的距离,其中分母为 500。理想的情况下,后向估计应该和前向是一致的,此时的几何相似性为 1。
接下来,我们衡量前向和后向的循环权重。由于跟踪失败情况的存在,后向传播的最终位置可能和前向的起始位置不相同。在这种情况下,两个轨迹并不能构成一个闭环。如图 2(b)所示,跟踪器 1 和 2 构成了闭环,但是 3 并没有。此外,虽然 1 和 2 都构成了闭环,但是两者的 IoU 差距还是很大的,因为 2 出现了很大的不重合。但是这可能是因为 heavy occlusion,反而 跟踪器 2 可能是成功跟踪上的。与此对比,跟踪器 3 可能就是失败的 tracker 了。
实际上,作者计算两个对应 BBox 的重合度,得到:

其中,德尔塔 里面有一个 x 的表示的是该 BBox 的面积,而有两个 BBox 的是两个 BBox 的重合面积。当该比值小于 0.3 的时候,表示前向和后向轨迹不一致。作者统计在这个短期内不匹配的次数,以检查两个轨迹是否构成一个闭环。然后,定义两个轨迹的循环权重如下:

注意到,10^6 是一个任意的大数(big number)。
此外,作者也定义了 appearance similarity 来衡量反向位置的可靠性。假设我们已经用多个 tracker 跑完了某一段,得到了前向轨迹。我们保持四个图像块,沿着前向轨迹选择的 bbox。第一帧的 bbox 是默认选择的,其他三个bbox更新用于产生最高的判别函数得分。假设 P(x) 表示 x 位置的 image patch,然后,其后向轨迹对应该图像块的 appearance similarity 可以定义为:

其中,分母中 delta 2 的平方 为 900,w 和 h 分别是 BBox 的宽和高。K 是高斯权重 mask,黑点表示 pixel-by-pixel weight multiplication。如果该指标较小,则表明:反向轨迹的 bbox 相对于以前的,快速改变了其外观,可能表明出现了 tracking error。
最终,我们组合几何相似性,循环权重,外观相似性来量化跟踪器的鲁棒性,得到:
该度量值越大,表明前向轨迹越可靠。
3.3 Tracking by Optimal Trajectory Selection.
作者为了降低计算复杂度,每间隔 $\tao$ 帧运行一次轨迹分析。然后开始计算鲁棒性得分,得到当前 frame clip 的轨迹,即:公式(11)。
3.4 Failure Handling:
作者也设置了一个阈值,对多个轨迹进行分析,进行 tracking failure 的判断。
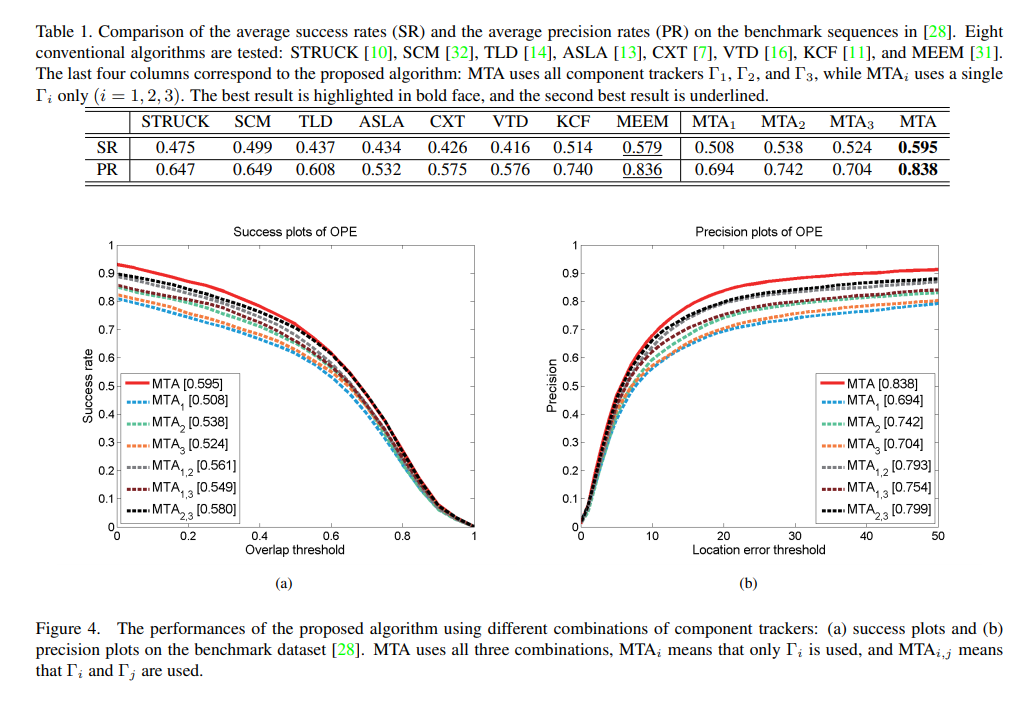
4. Experiments:

==
Multihypothesis Trajectory Analysis for Robust Visual Tracking的更多相关文章
- Summary on Visual Tracking: Paper List, Benchmarks and Top Groups
Summary on Visual Tracking: Paper List, Benchmarks and Top Groups 2018-07-26 10:32:15 This blog is c ...
- Resources in Visual Tracking
这个应该是目前最全的Tracking相关的文章了 一.Surveyand benchmark: 1. PAMI2014:VisualTracking_ An Experimental Sur ...
- Adaptive Decontamination of the Training Set: A Unified Formulation for Discriminative Visual Tracking
Martin Danelljan 判决类追踪模型是由训练样本学习得到,但是为了适应目标和背景的变化sample set在每一帧中都会更新. 令(xjk, yjk)表示第k帧k={1,2,...,t}中 ...
- Survey of single-target visual tracking methods based on online learning 翻译
基于在线学习的单目标跟踪算法调研 摘要 视觉跟踪在计算机视觉和机器人学领域是一个流行和有挑战的话题.由于多种场景下出现的目标外貌和复杂环境变量的改变,先进的跟踪框架就有必要采用在线学习的原理.本论文简 ...
- 论文笔记之: Hierarchical Convolutional Features for Visual Tracking
Hierarchical Convolutional Features for Visual Tracking ICCV 2015 摘要:跟卢湖川的那个文章一样,本文也是利用深度学习各个 layer ...
- 论文笔记:SiamRPN++: Evolution of Siamese Visual Tracking with Very Deep Networks
SiamRPN++: Evolution of Siamese Visual Tracking with Very Deep Networks 2019-04-02 12:44:36 Paper:ht ...
- 论文笔记:Deeper and Wider Siamese Networks for Real-Time Visual Tracking
Deeper and Wider Siamese Networks for Real-Time Visual TrackingUpdated on 2019-04-01 16:10:37 Paper ...
- Particle filter for visual tracking
Kalman Filter Cons: Kalman filtering is inadequate because it is based on the unimodal Gaussian dist ...
- ‘Skimming-Perusal’ Tracking: A Framework for Real-Time and Robust Long-term Tracking
‘Skimming-Perusal’ Tracking: A Framework for Real-Time and Robust Long-term Tracking 2019-09-05 21:1 ...
随机推荐
- 智能制造进入下半场?APS如何进行优化
按照现在算法和计算机处理能力的发展,现在资源优化的方向已经逐渐摒弃,而是在更系统的“有限产能计划的”框架内一并解决产能和物料的问题. 我们所看到的新近涌现出来的很多APS系统.但碍于算法的复杂程度,在 ...
- nginx 常用的location rewrite proxy_pass
location 以 = 开头,表示精确匹配:如只匹配根目录结尾的请求,后面不能带任何字符串. 以^~ 开头,表示uri以某个常规字符串开头,如果匹配到,则不继续往下匹配.不是正则匹配 以~ 开头,表 ...
- js检测页面触底
<script> function getDocumentTop() { var scrollTop = 0, bodyScrollTop = 0, documentScrollTop = ...
- go中如何更好的迭代
三种迭代方式 3 ways to iterate in Go 有如下三种迭代的写法: 回调函数方式迭代 通过Next()方法迭代.参照python 迭代器的概念,自定义Next()方法来迭代 通过ch ...
- 互斥锁的robust属性的介绍和使用
一个具体的场景:在多线程中,当一个线程获得锁之后异常退出后,应该怎么处理? 方案一 使用锁的robust特性 简单地讲,就是当拥有这个锁的线程挂了后,下一个尝试去获得锁的线程会得到EOWNWERDEA ...
- Httpd服务入门知识-Httpd服务常见配置案例之ServerSignature指令选项
Httpd服务入门知识-Httpd服务常见配置案例之ServerSignature指令选项 作者:尹正杰 版权声明:原创作品,谢绝转载!否则将追究法律责任. 一.ServerSignature指令概述 ...
- Cleaning Robot POJ - 2688
题目链接:https://vjudge.net/problem/POJ-2688 题意:在一个地面上,有一个扫地机器人,有一些障碍物,有一些脏的地砖,问,机器热能不能清扫所有的地砖, (机器人不能越过 ...
- 大数据调度工具oozie详细介绍
背景 之前项目中的sqoop等离线数据迁移job都是利用shell脚本通过crontab进行定时执行,这样实现的话比较简单,但是随着多个job复杂度的提升,无论是协调工作还是任务监控都变得麻烦,我们选 ...
- 用数据泵技术实现逻辑备份Oracle 11g R2 数据泵技术详解(expdp impdp)
用数据泵技术实现逻辑备份 from:https://blog.csdn.net/weixin_41078837/article/details/80618916 逻辑备份概述 逻辑备份时创建数据库对象 ...
- 数据库plsql配置
https://jingyan.baidu.com/article/d8072ac4957b28ec95cefd9f.html