深度学习原理与框架-图像补全(原理与代码) 1.tf.nn.moments(求平均值和标准差) 2.tf.control_dependencies(先执行内部操作) 3.tf.cond(判别执行前或后函数) 4.tf.nn.atrous_conv2d 5.tf.nn.conv2d_transpose(反卷积) 7.tf.train.get_checkpoint_state(判断sess是否存在
1. tf.nn.moments(x, axes=[0, 1, 2]) # 对前三个维度求平均值和标准差,结果为最后一个维度,即对每个feature_map求平均值和标准差
参数说明:x为输入的feature_map, axes=[0, 1, 2] 对三个维度求平均,即每一个feature_map都获得一个平均值和标准差
2.with tf.control_dependencies([train_mean, train_var]): 即执行with里面的操作时,会先执行train_mean 和 train_var
参数说明:train_mean表示对pop_mean进行赋值的操作,train_var表示对pop_var进行赋值的操作
3.tf.cond(is_training, bn_train, bn_inference) # 如果is_training为真,执行bn_train函数操作,如果为假,执行bn_inference操作
参数说明:is_training 为真和假,bn_train表示训练的normalize, bn_inference表示测试的normalize
4. tf.nn.atrous_conv2d(x, filters, dilated, padding) # 进行空洞卷积操作,用于增加卷积的感受野
参数说明:x表示输入样本,filter表示卷积核,dilated表示卷积核的补零个数,padding表示对feature进行补零操作
5. tf.nn.conv2d_transpose(x, filters, output_size, strides) # 进行反卷积操作
参数说明:x表示输入样本,filter表示卷积核,output_size表示输出的维度, strides表示图像扩大的倍数
6.tf.nn.batch_normalization(x, mean, var, beta, scale, episilon) # 进行归一化操作
参数说明: x表示输入样本,mean表示卷积的平均值,var表示卷积的标准差,beta表示偏差,scale表示标准化后的范围,episilon防止分母为0
7.tf.train.get_checkpoint_state('./backup') # 判断用于进行model保存的文件中是否有checkpoint,即是否之前已经有过保存的sess
参数说明:'./backup'进行sess保存的文件名
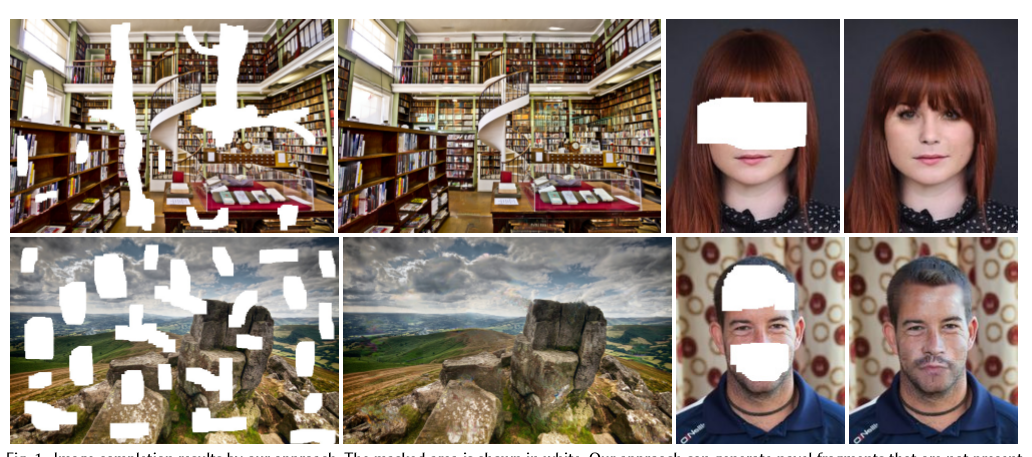
原理的话,使用论文中的图进行说明, 这是论文中的效果图,我们可以看出不管是场景还是人脸都有较好的复原效果
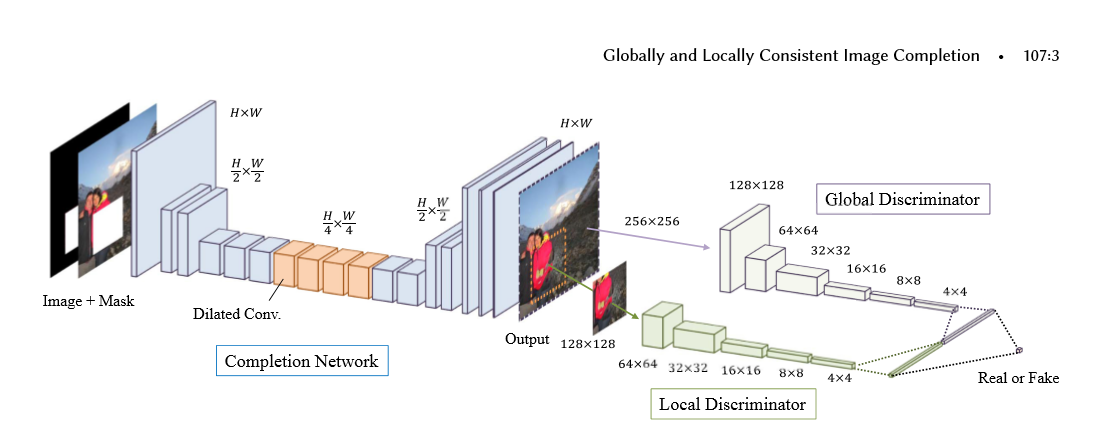
下面是论文的结构图, 主要是有2个结构组成,
第一个结构是全卷机填充网络:首先使用一个mask和图片进行组合,构成了具有空缺的图片,将空缺图片输入到全卷积中,经过stride等于2,做两次的向下卷积,然后经过4个dilated_conv(空洞卷积),为了在不损失维度的情况下,增加卷积核的视野,最后使用补零的反转卷积进行维度的升高,再经过最后两层卷积构成了图片。
第二个结构是global_discrimanator 和 local_discimanator
对于global_x输入的大小为全图的大小,而local_x的输入大小为全图大小的一半,上图的mask的大小为96-128且在local_x的内部,取值的范围为随机值
global_x 和 local_x经过卷积后,输出1024的输出,我们将输出进行串接tf.concat,对最后的输出结果[1]进行预测,判别图片为实际图片(真)还是经过填充的图片(假)
网络系数的展示



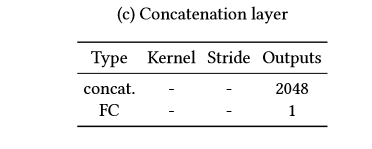
填充网络(卷积-空洞卷积-反卷积) 全局判别网络(卷积-全连接) 局部判别网络(卷积-全连接) 串接网络(全连接)
训练步骤:为了使得对抗网络训练更加的有效,我们需要先对填充网络进行预训练,然后是对判别网络进行训练,最后将生成网络和判别网络放在一起进行训练
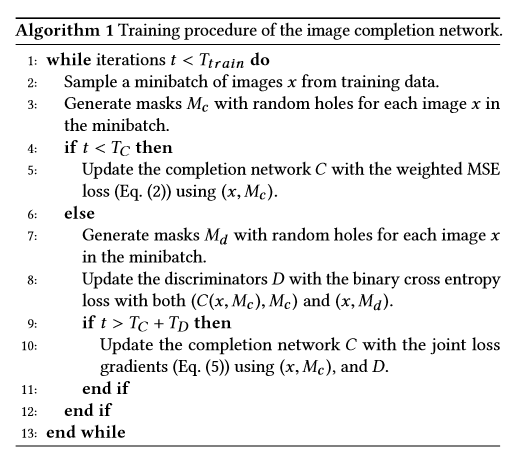
这里说明一下,填充 网络的损失值是mse,即tf.l2_loss() 判别网络的损失值是tf.reduce_mean(tf.nn.softmax...logits)
代码:代码主要由五个.py文件构建,
1.to_npy进行图片的预处理,并将数据保存为.npy文件,
2.load.py 使用np.load进行x_train和x_test数据的读取
3.train.py 主要进行参数的训练,并且构造出mask_batch, local_x和local_complement
4.network用于进行模型结构的搭建,构建生成网络和判别网络,同时获得生成网络和判别网络的损失值
5.layer 用于卷积,反卷积,全连接,空洞卷积等函数的构建
数据的准备:to_npy
import numpy as np
import tensorflow as tf
import glob
import cv2
import os # 将处理好的图片进行保存,为了防止经常需要处理图片
# 进行数据的压缩
IMAGE_SIZE = 128
# 训练集的比例
train_ep = 0.9
x = []
# 循环文件中的所有图片的地址
pathes = glob.glob('/data/*jpg')
# 循环前500个图片的地址
for path in pathes[:500]:
# 使用cv2.imread读取图片
img = cv2.imread(path)
# 将图片进行维度的变换
img = cv2.resize(img, (IMAGE_SIZE, IMAGE_SIZE))
# 将读入的图片从BGR转换为RGB
img = cv2.cvtColor(img, cv2.COLOR_BGR2RGB)
# 将图片添加到列表中
x.append(img)
# 如果不存在./npy文件
if not os.path.exists('./npy'):
# 使用os.makedirs进行创建文件npy
os.makedirs('./npy') # 获得train的索引
p = len(x) * train_ep
# 训练集x
train_x = x[:p]
# 测试集x
test_x = x[p:]
# 将预处理好的图片保存为.npy文件
np.save('./npy/x_train.npy', train_x)
np.save('./npy/x_test.npy', test_x)
train.py
import numpy as np
import tensorflow as tf
import os
from network import *
import load
import tqdm
import cv2 # 第一步:定义超参数
IMAGE_SIZE = 128 # 输入图片的大小
LOCAL_SIZE = 64 # local的大小
HOL_MIN = 24 # 洞的最小值
HOL_MAX = 48 # 洞的最大值
LEARNING_RATE = 1e-3 # 学习率
BATCH_SIZE = 1 # batch_size大小
PRETRAIN_NUM = 100 # 对生成网络预训练的次数 def train():
# 第二步:构造输入的初始化参数
x = tf.placeholder(tf.float32, [BATCH_SIZE, IMAGE_SIZE, IMAGE_SIZE, 3]) # 图片x,维度为1, 128, 128, 3
mask = tf.placeholder(tf.float32, [BATCH_SIZE, IMAGE_SIZE, IMAGE_SIZE, 1]) # 掩模mask, 1, 128, 128, 1用于生成图片空白区域
x_local = tf.placeholder(tf.float32, [BATCH_SIZE, LOCAL_SIZE, LOCAL_SIZE, 3]) # 图片x部分图像,维度为1, 64, 64, 3
completion_global = tf.placeholder(tf.float32, [BATCH_SIZE, IMAGE_SIZE, IMAGE_SIZE, 3]) # 生成图像的维度,1, 128,128,3
completion_local = tf.placeholder(tf.float32, [BATCH_SIZE, LOCAL_SIZE, LOCAL_SIZE, 3]) # 生成图像部分图像,1, 64, 64, 3
is_training = tf.placeholder(tf.bool, []) # 是够进行训练,在batch_normalize中使用 # 第三步:调用network,构造网络框架,包括生成网络,判别网络,以及其生成和判别的损失值
model = Network(x, mask, x_local, completion_global, completion_local, is_training, BATCH_SIZE) # 第四步:使用tf.session 构造sess
sess = tf.Session() # 第五步:初始化global_step和epoch
global_step = tf.Variable(0, name='global_step', trainable=False)
epoch = tf.Variable(0, name='epoch', trainable=False)
# 第六步:构造自适应梯度下降器,获得生成网络和判别网络损失值下降操作
opt = tf.train.AdamOptimizer(LEARNING_RATE)
g_loss_op = opt.minimize(model.g_loss, global_step=global_step)
d_loss_op = opt.minimize(model.d_loss, global_step=global_step)
# 第七步:使用sess.run进行初始化操作
init = tf.global_variables_initializer()
sess.run(init)
# 第八步:如果存在./backup文件,就使用saver.restore()加载sess
if tf.train.get_checkpoint_state('./backup'):
saver = tf.train.Saver()
saver.restore(sess, './backup/latest')
# 第九步:获得训练集和测试集,使用load中定义的load函数, 并对读取的图片做归一化操作
x_train, x_test = load.load()
x_train = np.array([a/127.5 - 1 for a in x_train])
x_test = np.array([a/127.5 - 1 for a in x_test])
# 定义一个epoch迭代的次数
step_num = int(len(x_train)/BATCH_SIZE) while True:
# 第十步:将epoch值进行+1操作
sess.run(tf.assign_add(epoch, 1))
# 对输入的x_train进行洗牌操作,每次迭代
np.random.shuffle(x_train)
# 第十一步:如果当前迭代的次数小于预训练,进行生成网络的训练
if sess.run(epoch) <= PRETRAIN_NUM:
# 迭代每个epoch,每次迭代的大小为一个batch_size
for i in tqdm.tqdm(range(step_num)):
# 获得一个batch_size的图片
x_batch = x_train[BATCH_SIZE*i:(i+1)*BATCH_SIZE]
# 获得points_batch, 和一个batch_size的掩模
points_batch, masks_batch = get_points()
# 将x和mask_batch,is_training 传入,进行g_loss_op即损失值的降低
_, _g_loss = sess.run([g_loss_op, model.g_loss], feed_dict={x:x_batch, mask:masks_batch, is_training:True})
# 进行验证操作
# 对x_test进行洗牌操作
np.random.shuffle(x_test)
# 获得一个BATHC_SIZE的大小
x_batch = x_test[:BATCH_SIZE]
# 获得一个batch_size 的生成图片,执行model.completion
completion = sess.run([model.completion], feed_dict={x:x_batch, mask:masks_batch, is_training:False})
# 取出其中一张图片,做归一化的反操作,还原回原始图片
sample = np.array((completion[0] + 1) * 127.5, dtype=np.uint8)
# 将图片进行保存,使用cv2.imwrite
cv2.imwrite('{}_epoch.jpg'.format('{0:06d}'.format(epoch)), cv2.cvtColor(sample, cv2.COLOR_RGB2BGR))
# 将参数保存在./backup/latest
saver = tf.train.Saver()
saver.save(sess, './backup/latest', write_meta_graph=False)
# 如果次数为100次,就将参数保存在/backup/pre_train
if sess.run(epoch) == PRETRAIN_NUM:
saver.save(sess, './backup/pre_train', write_meta_graph=False) # 第十二步:如果epoch大于预训练的次数,就对生成网络和判别网络进行同时的训练
else:
# 循环一个epoch
for i in tqdm.tqdm(range(step_num)):
# 获得一个batch的图片
x_batch = x_train[BATCH_SIZE*i:(i+1)*BATCH_SIZE]
# 获得一个batch的点坐标,和一个batch的掩模
points_batch, masks_batch = get_points()
# 初始化g_loss
g_loss_value = 0
# 初始化d_loss
d_loss_value = 0
# 执行g_loss_op降低g_loss损失值,同时执行self.completion,获得生成图片completion
_, completion, g_loss = sess.run([g_loss_op, model.completion, model.g_loss], feed_dict={x:x_batch, mask:masks_batch, is_training:True})
# 将g_loss添加到g_loss_value
g_loss_value += g_loss
# 构造一个batch的x_local
x_local_batch = []
# 构造一个batch的completion_batch
completion_local_batch = []
# 循环batch_size
for i in range(BATCH_SIZE):
# 获得point_batch中一个点坐标
x1, y1, x2, y2 = points_batch[i]
# 构造一个x_local, 添加到x_local_batch
x_local_batch.append(x_batch[i][y1:y2, x1:x2, :])
# 构造一个completion_local, 添加到completion_local_batch
completion_local_batch.append(completion[i][y1:y2, x1:x2])
# 执行d_loss_op,降低d_loss的损失值
_, d_loss = sess.run([d_loss_op, model.d_loss], feed_dict={x:x_batch, mask:masks_batch, x_local:x_local_batch, completion_global:completion,
completion_local:completion_local_batch, is_training:True})
# 将损失值进行添加
d_loss_value += d_loss
# 清洗x_test
np.random.shuffle(x_test)
# 获得一个x_batch
x_batch = x_test[:BATCH_SIZE]
# 输入测试图片获得生成图片
completion = sess.run([model.completion], feed_dict={x:x_batch, mask:masks_batch, is_training:False})
# 取生成图片的第一张图片,进行反归一化
sample = np.array((completion[0] + 1) * 127.5, dtype=np.uint8)
# 使用cv2.imwrite保存图片
cv2.imwrite('{}.epoch'.format('{0:06d}'.format(epoch)), cv2.cvtColor(sample, cv2.COLOR_RGB2BGR))
# 构造tf.train.Saver() 进行sess的保存操作
saver = tf.train.Saver()
saver.save(sess, './backup/latest', write_meta_graph=False) def get_points():
# 构造点列表,用于构建局部图像
points = []
# 构造掩模列表,用于构造残缺的原始图像
maskes = []
for i in range(BATCH_SIZE):
# 获得左上角两个点,范围为[0, IMAGE_SIZE-LOCAL_SIZE]
x1, y1 = np.random.randint(0, IMAGE_SIZE-LOCAL_SIZE, 2)
# 获得右下角的两个点,分别进行相加操作
x2, y2 = np.array([x1, y1]) + LOCAL_SIZE
# 将坐标添加到points
points.append([x1, y1, x2, y2])
# 在H0L_MIN和HOL_MAX范围内构造w,h
w, h = np.random.randint(HOL_MIN, HOL_MAX, 2)
# 左上角x轴的坐标为x1+(0, LOCAL_SIZE-w)的范围内
p1 = x1 + np.random.randint(0, LOCAL_SIZE-w)
# 左上角y轴的坐标为y1+(0, LOCAL_SIZE-h)的范围内
q1 = y1 + np.random.randint(0, LOCAL_SIZE-h)
# 右边的x坐标为p1+w
p2 = p1 + w
# 右边的y坐标为q1+h
q2 = q1 + h
# 构造全为0的3维矩阵
m = np.zeros(shape=[IMAGE_SIZE, IMAGE_SIZE, 1])
# 在该范围内的值为1, 并进行添加
m[q1:q2, p1:p2, :] = 1
maskes.append(m)
# 返回points和掩模的数组
return np.array(points), np.array(maskes) if __name__ == '__main__':
train()

代码:network.py: 构建Network类,构造生成网络,生成self.completion, 构造判别网络,获得x,x_local的输出结果self.real,获得global_completion, local_completion的输出结果self.fake, 使用l2_loss构造生成网络的损失值g_loss, 使用交叉熵构造判别网络的损失值d_loss
第一步:使用self.generator构造生成网络, 输入为x*(1-mask), is_training
第二步:使用self.imition * mask + x * (1-mask) 构造self.completion 即生成的图片
第三步:使用self.discrimator, 输入为x, x_local, is_training, reuse=False, 用于真实样本的判别self.real
第四步:使用self.discrimator, 输入为global_complement, local_complement, is_training, reuse=True, 用于生成样本的判别self.fake
第五步:使用tf.nn.l2_loss生成mse的损失值,用于生成网络的损失值,self.g_loss
第六步:使用tf.reduce_mean(tf.sotfmax..logits(labels=tf.ones_like(real), logits=real)) 获得真实的交叉熵,同理获得生成样本的交叉熵,将两者进行加和乘以系数,获得最终的损失值即self.d_loss。
第七步:使用tf.get_collection(tf.GraphKey.TRAINABEL_VARIABLES, scope=‘generator’) 和scope = ‘discrimator’获得生成网络和判别网络的参数
import tensorflow as tf
import numpy as np
from layer import * class Network: def __init__(self, x, mask, x_local, completion_global, completion_local, is_training, batch_size):
self.batch_size = batch_size
# 第一步: 构造生成网络,获得生成的图片,(1-mask) * x 构成残缺空白的输入图片
self.imition = self.generator((1-mask)*x, is_training)
# 第二步:将生成图片部分区域与残缺空白的输入图片进行拼接,获得最终的图片
self.completion = mask * self.imition + (1-mask)*x
# 第三步:定义discriminator,对x和x_local判断real结果
self.real = self.discrimator(x, x_local, is_training, reuse=False)
# 第四步:使用discrimanator,对completion_global 和 completion_local判断fake结果
self.fake = self.discrimator(completion_global, completion_local, is_training, reuse=True)
# 第五步:定义生成网络的损失值,使用mse
self.g_loss = self.cal_g_loss(x, self.completion)
# 第六步:定义判别网络的损失值,使用交叉熵, 即real判别为1,fake判别为0
self.d_loss = self.cal_d_loss(self.real, self.fake)
# 第七步:获得生成网络的参数
g_variables = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope='generator')
d_variables = tf.get_collection(tf.GraphKeys.TRAINABLE_VARIABLES, scope='discrimator') # 判别网络的损失值,输入为
def cal_d_loss(self, real, fake):
# 损失值系数
epsilon = 4e-4
# 真实样本的交叉熵损失值, 标签为1
real_loss = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(logits=real, labels=tf.ones_like(real)))
# 生成样本的交叉熵损失值,标签为0
fake_loss = tf.reduce_mean(tf.nn.softmax_cross_entropy_with_logits(logits=fake, labels=tf.zeros_like(fake)))
# 将真实样本和生成样本的损失值进行加和,并进行损失系数的乘积
return tf.add(real_loss, fake_loss) * epsilon # 生成网络的损失值计算,使用的是mse
def cal_g_loss(self, x, completion):
# 使用l2_loss损失值计算
return tf.nn.l2_loss(x - completion) # 构建判别网络
def discrimator(self, x, x_local, is_training, reuse):
# 构建完整图片的判别网络
def global_discrimator(x):
# 设置完整图片判别网络参数的范围
with tf.variable_scope('global'):
# 第一层卷积,卷积大小为5*5*3*64,步长为2
with tf.variable_scope('conv1'):
x = conv_layer(x, [5, 5, 3, 64], 2)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x)
# 第二层卷积,卷积大小为5*5*3*64,步长为2
with tf.variable_scope('conv2'):
x = conv_layer(x, [5, 5, 64, 128], 2)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x)
# 第三层卷积,卷积大小为5*5*3*64,步长为2
with tf.variable_scope('conv3'):
x = conv_layer(x, [5, 5, 128, 256], 2)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x)
# 第四层卷积,卷积大小为5*5*3*64,步长为2
with tf.variable_scope('conv4'):
x = conv_layer(x, [5, 5, 256, 512], 2)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x)
# 第五层卷积,卷积大小为5*5*3*64,步长为2
with tf.variable_scope('conv5'):
x = conv_layer(x, [5, 5, 512, 512], 2)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x)
# 构建全连接层,输出为1024
with tf.variable_scope('fc'):
# 对卷积层的输出进行维度变换
x = flatten_conv(x)
# 进行全连接操作,输出的维度为1024
x = fc_layer(x, 1024) return x
# 构造局部图像的判别网络
def local_discrimator(x):
# 设置局部网络判别的参数范围
with tf.variable_scope('local'):
# 第一层卷积,卷积大小为5*5*3*64,步长为2
with tf.variable_scope('conv1'):
x = conv_layer(x, [5, 5, 3, 64], 2)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x)
# 第二层卷积,卷积大小为5*5*3*64,步长为2
with tf.variable_scope('conv2'):
x = conv_layer(x, [5, 5, 64, 128], 2)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x)
# 第三层卷积,卷积大小为5*5*3*64,步长为2
with tf.variable_scope('conv3'):
x = conv_layer(x, [5, 5, 128, 256], 2)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x)
# 第四层卷积,卷积大小为5*5*3*64,步长为2
with tf.variable_scope('conv4'):
x = conv_layer(x, [5, 5, 256, 512], 2)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x)
# 构造全连接网络,输出结构为1024
with tf.variable_scope('fc'):
x = flatten_conv(x)
x = fc_layer(x, 1024) return x
# 设置判别网络的参数范围
with tf.variable_scope('discrimator', reuse=reuse):
# 带入x_local获得局部图像的判别输出值
local_disc = local_discrimator(x_local)
# 带入x获得完整图像的判别输出值
global_disc = global_discrimator(x)
with tf.variable_scope('concatenation'):
# 将局部图像输出值与全局图像进行串接,维度为[batch_size, 2048]
output = tf.concat((local_disc, global_disc), axis=1)
# 接上一个全连接,最后的输出值维度为1
output = fc_layer(output, 1)
# 返回判别结果
return output # 用于进行生成网络,输入为拥有空白区域的图片,is_training表示是否是在训练
def generator(self, x, is_training):
# 定义参数的范围为'generator'
with tf.variable_scope('generator'):
# 第一层卷积层
with tf.variable_scope('conv1'):
# 卷积核的大小为[5, 5, 3, 64],步长为1
x = conv_layer(x, [5, 5, 3, 64], 1)
# 归一化操作
x = batch_normalize(x, is_training)
# 非线性激活
x = tf.nn.relu(x)
# 第二层卷积
with tf.variable_scope('conv2'):
# 卷积核的大小为[3, 3, 64, 128], 步长为2, 维度变为原来的1/2
x = conv_layer(x, [3, 3, 64, 128], 2)
# 归一化操作
x = batch_normalize(x, is_training)
# 非线性激活
x = tf.nn.relu(x)
# 第三层卷积操作
with tf.variable_scope('conv3'):
# 卷积核的大小为[3, 3, 128, 128], 步长为1
x = conv_layer(x, [3, 3, 128, 128], 1)
# 归一化操作
x = batch_normalize(x, is_training)
# 非线性激活
x = tf.nn.relu(x)
# 第四层卷积操作
with tf.variable_scope('conv4'):
# 卷积核的大小为[3, 3, 128, 256], 步长为2
x = conv_layer(x, [3, 3, 128, 256], 2)
# 归一化操作
x = batch_normalize(x, is_training)
# 非线性激活
x = tf.nn.relu(x)
# 第五层卷积操作
with tf.variable_scope('conv5'):
# 卷积核的大小为[3, 3, 256, 256], 步长为1
x = conv_layer(x, [3, 3, 256, 256], 1)
# 归一化操作
x = batch_normalize(x, is_training)
# 非线性激活
x = tf.nn.relu(x)
# 第六层卷积操作
with tf.variable_scope('conv6'):
# 卷积核的大小为[3, 3, 256, 256], 步长为1
x = conv_layer(x, [3, 3, 256, 256], 1)
# 归一化操作
x = batch_normalize(x, is_training)
# 非线性激活
x = tf.nn.relu(x)
# 第一层空洞卷积
with tf.variable_scope('dilated1'):
# 卷积核的大小为[3, 3, 256, 256], 卷积补零的个数为1
x = dilated_conv_layer(x, [3, 3, 256, 256], 2)
# 归一化操作
x = batch_normalize(x, is_training)
# 非线性激活
x = tf.nn.relu(x)
# 第二层空洞卷积
with tf.variable_scope('dilated2'):
# 卷积核的大小为[3, 3, 256, 256], 卷积补零的个数为3
x = dilated_conv_layer(x, [3, 3, 256, 256], 4)
# 归一化
x = batch_normalize(x, is_training)
# 非线性激活
x = tf.nn.relu(x)
# 第三层空洞卷积
with tf.variable_scope('dilated3'):
# 卷积核的大小为[3, 3, 256, 256], 卷积补零的个数为7
x = dilated_conv_layer(x, [3, 3, 256, 256], 8)
# 归一化操作
x = batch_normalize(x, is_training)
# 非线性激活
x = tf.nn.relu(x)
# 第四层空洞卷积
with tf.variable_scope('dilated4'):
# 卷积核的大小为[3, 3, 256, 256], 卷积补零的个数为15
x = dilated_conv_layer(x, [3, 3, 256, 256], 16)
# 归一化操作
x = batch_normalize(x, is_training)
# 非线性激活
x = tf.nn.relu(x)
# 第七层卷积
with tf.variable_scope('conv7'):
# 卷积的维度为[3, 3, 256, 256], 步长为1
x = conv_layer(x, [3, 3, 256, 256], 1)
# 归一化操作
x = batch_normalize(x, is_training)
# 激活
x = tf.nn.relu(x)
# 第八层卷积
with tf.variable_scope('conv8'):
# 卷积的维度为[3, 3, 256, 256], 步长为1
x = conv_layer(x, [3, 3, 256, 256], 1)
# 归一化操作
x = batch_normalize(x, is_training)
# 激活操作
x = tf.nn.relu(x)
# 第一层反卷积,将维度提升为原来的2倍,即从32,32变为64,64
with tf.variable_scope('deconv1'):
# 反卷积,[4, 4, 128, 256] 4 和 4表示卷积的大小,256表示输入维度,128表示输出维度,[self.batch_size, 64, 64, 128]表示输出的大小,2表示扩张的倍数
x = deconv_layer(x, [4, 4, 128, 256], [self.batch_size, 64, 64, 128], 2)
# 归一化操作
x = batch_normalize(x, is_training)
# 激活操作
x = tf.nn.relu(x) with tf.variable_scope('conv9'):
# 第九层卷积,卷积核大小为[3, 3, 128, 128], 步长为1
x = conv_layer(x, [3, 3, 128, 128], 1)
# 归一化操作
x = batch_normalize(x, is_training)
# 激活操作
x = tf.nn.relu(x) with tf.variable_scope('deconv2'):
# 进行反卷积,将维度变为[128, 128]
x = deconv_layer(x, [4, 4, 64, 128], [self.batch_size, 128, 128, 64], 2)
# 归一化操作
x = batch_normalize(x, is_training)
# 激活
x = tf.nn.relu(x) with tf.variable_scope('conv10'):
# 第十层卷积,进行维度的降低,即把64降维32
x = conv_layer(x, [3, 3, 64, 32], 1)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x) with tf.variable_scope('conv11'):
# 第十一层,进行维度的降低,把32层的维度转换为3层的维度,即图像的维度值
x = conv_layer(x, [3, 3, 32, 3], 1)
x = batch_normalize(x, is_training)
x = tf.nn.relu(x) return x
layer.py 用于构建一些基础的网络结构,如卷积层,全连接层,反卷积层,空洞卷积层,归一化层,维度变化层,
import tensorflow as tf # 构造卷积层, 使用的是tf.nn.conv2d
def conv_layer(x, shape, stride):
# 构造卷积核,大小为shape,进行参数更新
filter = tf.get_variable('weight',
shape=shape,
dtype=tf.float32,
initializer=tf.contrib.layers.xavier_initializer(),
trainable=True)
# 进行卷积操作
return tf.nn.conv2d(x, filter, strides=[1, stride, stride, 1], padding='SAME') # 构造归一化操作,测试阶段使用的mean和var为训练阶段的动量平均的mean和var
def batch_normalize(x, is_training, decay=0.99, epsilon=0.001):
# 进行训练时的归一化
def bn_train():
# batch的mean和batch的var, 使用tf.nn.moments获得标准差和均值
batch_mean, batch_var = tf.nn.moments(x, axes=[0, 1, 2])
# 将pop_mean 使用tf.assign进行更新操作,为动量梯度的平均值
train_mean = tf.assign(pop_mean, pop_mean * decay + batch_mean * (1-decay))
# 将pop_var 使用tf.assign进行更新操作,为动量梯度的标准差
train_var = tf.assign(pop_var, pop_var * decay + batch_var * (1-decay))
# 使用tf.control_dependencies,先执行更新操作
with tf.control_dependencies([train_mean, train_var]):
# 进行归一化操作,使用的平均值为当前的batch_mean 和 batch_var, beta和scale需要进行参数更新
return tf.nn.batch_normalization(x, batch_mean, batch_var, beta, scale, epsilon) def bn_inference():
# 测试时的归一化操作,pop_mean和pop_var表示训练时动量梯度的平均值和标准差, beta为偏度,scale为范围
return tf.nn.batch_normalization(x, pop_mean, pop_var, beta, scale, epsilon) # 获得最后一个维度
dim = x.get_shape().as_list()[-1]
# 构造训练过程中的偏度bata
beta = tf.get_variable(
name='beta',
shape=[dim],
dtype=tf.float32,
initializer=tf.truncated_normal_initializer(stddev=0.0),
trainable=True
)
# 构造训练过程中的范围scale
scale = tf.get_variable(
name='scale',
shape=[dim],
dtype=tf.float32,
initializer=tf.truncated_normal_initializer(stddev=0.1),
trainable=True
)
# 构造动量平均的平均值的初始值
pop_mean = tf.get_variable(
name = 'pop_mean',
shape=[dim],
dtype=tf.float32,
initializer=tf.constant_initializer(0.0),
trainable=False
)
# 构造动量平均的标准差的初始值
pop_var = tf.get_variable(
name='pop_var',
shape=[dim],
dtype=tf.float32,
initializer=tf.constant_initializer(1.0),
trainable=False)
# 如果is_training为true执行bn_train, 否者执行bn_inference
return tf.cond(is_training, bn_train, bn_inference) # 构造空洞卷积,dilation表示卷积补零的个数
def dilated_conv_layer(x, shape, dilation):
# filter表示卷积核的构造
filters = tf.get_variable('filters',
shape=shape,
dtype=tf.float32,
initializer=tf.contrib.layers.xavier_initializer(),
trainable=True)
# 进行空洞卷积,dilation表示卷积核补零的大小
return tf.nn.atrous_conv2d(x, filters, dilation, padding='SAME') # 构造反卷积,output_shape表示输出的维度,stride表示扩大的倍数
def deconv_layer(x, filter_shape, output_shape, stride):
# 构造卷积
filters = tf.get_variable(
name = 'weight',
shape=filter_shape,
dtype=tf.float32,
initializer=tf.truncated_normal_initializer(stddev=0.1),
trainable=True
)
return tf.nn.conv2d_transpose(x, filters, output_shape, [1, stride, stride, 1]) # 进行维度的变化,用于进行全连接
def flatten_conv(x):
num = x.shape[0]
return tf.reshape(x, [num, -1]) # 构造全连接函数
def fc_layer(x, output_dim):
# 获得输入的最后一个维度,用于构造w
input_dim = x.get_shape().as_list()[-1]
# w的维度为input_dim, output_dim
w = tf.get_variable(
name='w',
shape=[input_dim, output_dim],
dtype=tf.float32,
initializer=tf.truncated_normal_initializer(stddev=0.1),
trainable=True
)
# b的维度为output_dim
b = tf.get_variable(
name='b',
shape=[output_dim],
dtype=tf.float32,
initializer=tf.truncated_normal_initializer(stddev=0.0),
trainable=True
)
# 进行点乘操作
return tf.add(tf.matmul(x, w), b)
load.py 进行.npy数据的载入操作
import numpy as np
import tensorflow as tf
import os # dir为data的路径
def load(dir='../data/npy'):
# 使用np.load获得存储好的数据
# 加载训练集
train_x = np.load(os.path.join(dir, 'x_train.npy'))
# 加载验证集
test_x = np.load(os.path.join(dir, 'x_test.npy'))
# 返回训练集和验证集
return train_x, test_x
深度学习原理与框架-图像补全(原理与代码) 1.tf.nn.moments(求平均值和标准差) 2.tf.control_dependencies(先执行内部操作) 3.tf.cond(判别执行前或后函数) 4.tf.nn.atrous_conv2d 5.tf.nn.conv2d_transpose(反卷积) 7.tf.train.get_checkpoint_state(判断sess是否存在的更多相关文章
- 深度学习与计算机视觉(12)_tensorflow实现基于深度学习的图像补全
深度学习与计算机视觉(12)_tensorflow实现基于深度学习的图像补全 原文地址:Image Completion with Deep Learning in TensorFlow by Bra ...
- [源码解析] 深度学习分布式训练框架 horovod (21) --- 之如何恢复训练
[源码解析] 深度学习分布式训练框架 horovod (21) --- 之如何恢复训练 目录 [源码解析] 深度学习分布式训练框架 horovod (21) --- 之如何恢复训练 0x00 摘要 0 ...
- [源码解析] 深度学习分布式训练框架 Horovod (1) --- 基础知识
[源码解析] 深度学习分布式训练框架 Horovod --- (1) 基础知识 目录 [源码解析] 深度学习分布式训练框架 Horovod --- (1) 基础知识 0x00 摘要 0x01 分布式并 ...
- [源码解析] 深度学习分布式训练框架 horovod (2) --- 从使用者角度切入
[源码解析] 深度学习分布式训练框架 horovod (2) --- 从使用者角度切入 目录 [源码解析] 深度学习分布式训练框架 horovod (2) --- 从使用者角度切入 0x00 摘要 0 ...
- 对比深度学习十大框架:TensorFlow 并非最好?
http://www.oschina.net/news/80593/deep-learning-frameworks-a-review-before-finishing-2016 TensorFlow ...
- 作为深度学习最强框架的TensorFlow如何进行时序预测!(转)
作为深度学习最强框架的TensorFlow如何进行时序预测! BigQuant 2 个月前 摘要: 2017年深度学习框架关注度排名tensorflow以绝对的优势占领榜首,本文通过一个小例子介绍了T ...
- 模型汇总24 - 深度学习中Attention Mechanism详细介绍:原理、分类及应用
模型汇总24 - 深度学习中Attention Mechanism详细介绍:原理.分类及应用 lqfarmer 深度学习研究员.欢迎扫描头像二维码,获取更多精彩内容. 946 人赞同了该文章 Atte ...
- [源码解析] 深度学习分布式训练框架 horovod (4) --- 网络基础 & Driver
[源码解析] 深度学习分布式训练框架 horovod (4) --- 网络基础 & Driver 目录 [源码解析] 深度学习分布式训练框架 horovod (4) --- 网络基础 & ...
- [源码解析] 深度学习分布式训练框架 horovod (3) --- Horovodrun背后做了什么
[源码解析] 深度学习分布式训练框架 horovod (3) --- Horovodrun背后做了什么 目录 [源码解析] 深度学习分布式训练框架 horovod (3) --- Horovodrun ...
随机推荐
- 285款photoshop烟花笔刷
这是一套非常漂亮的PS烟花笔刷,包含285款不同形状效果的笔刷样式,此套photoshop烟花笔刷非常容易使用,使用可以将它们用作照片叠加,用于数码照片处理,作为游戏或艺术品的视觉效果,以及作为装饰元 ...
- win10连接宽带,拨号提示错误720:不能建立到远程计算机的连接,解决方法
使用账号密码登录时,一直报720错误.解决方法是卸载以下IP驱动.卸载之后重新连接就正常了.亲测有效
- Jmeter 传 PUT 请求方式
最近用 Jmeter 发送 PUT 请求,踩了个坑,现记录如下: 难点在在于 body 内有一大串 json 形式的内容 1.PUT 请求的 body 内,直接将 json串传 form-data 形 ...
- javascript中的立即执行函数的原理
形如 ((function Test(a) { //code here... })('Hello')); 被称作立即执行函数. 首先需要了解的是,这并不是一种hack,这是javascript的基本语 ...
- 单例模式实例&多线程应用
单例模式是指:对于一个类在内存中只能存在唯一一个对象,这种设计模式叫做单例设计模式. 单例设计模式的写法: 1. 设置私有(private)的构造方法. 2. 实例化一个该类的对象作为成员变量,并设置 ...
- WinDbg安装
WinDbg是微软发布的一款相当优秀的源码级(source-level)调试工具,可以用于Kernel模式调试和用户模式调试,还可以调试Dump文件. 主页:http://msdn.microsoft ...
- postfix配置&使用
myorigin = $mydomain #以“user@example.com”(而不是“user@hostname.example.com”)发送邮件, #这样就没有理由将邮件发送到“user@h ...
- pip改源
临时 python -m pip install -i https://pypi.tuna.tsinghua.edu.cn/simple django==1.10 # ==后边指定版本号,也可以不指定 ...
- MSDE2008安装备忘
MSDE2008安装备忘(适用于WIN7 8 10) 1.系统中必须要VC8.0,即VC2005运行库.2.系统中必须要有.net framework2.0.3.5.4.6运行库.3.windows防 ...
- windows 10下安装linux系统
理员权限打开powershell,输入 Enable-WindowsOptionalFeature -Online -FeatureName Microsoft-Windows-Subsystem-L ...