使用键盘控制gazebo小车模型运动
gazebo小车模型创建详见另一篇博客
博客地址:gazebo小车模型(附带仿真环境) - zylyehuo - 博客园
参考链接
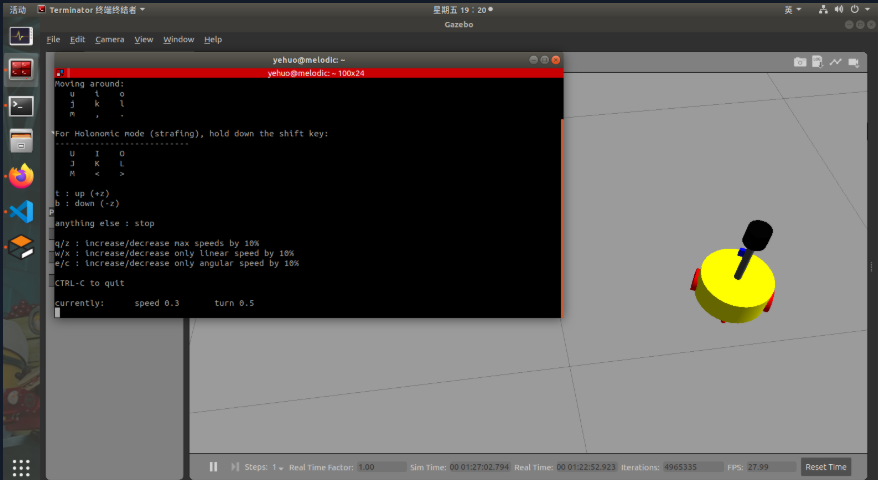
成果图

step1: 打开vscode进入之前创建的 mycar_ws 工作空间

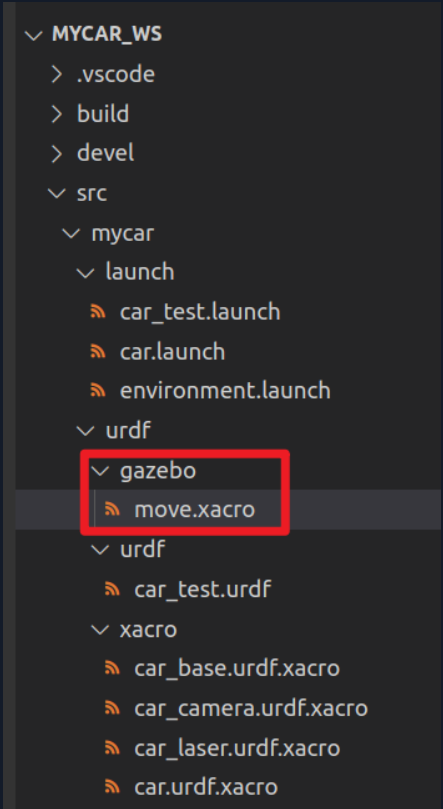
step2:按如图结构创建文件夹及文件
step3: 代码部分
src/mycar/urdf/gazebo/move.xacro
<robot name="my_car_move" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- Transmission implementation: used to connect the controller and joints -->
<xacro:macro name="joint_trans" params="joint_name">
<!-- Transmission is important to link the joints and the controller -->
<transmission name="${joint_name}_trans">
<type>transmission_interface/SimpleTransmission</type>
<joint name="${joint_name}">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
</joint>
<actuator name="${joint_name}_motor">
<hardwareInterface>hardware_interface/VelocityJointInterface</hardwareInterface>
<mechanicalReduction>1</mechanicalReduction>
</actuator>
</transmission>
</xacro:macro>
<!-- Each drive wheel needs to be equipped with a transmission device -->
<xacro:joint_trans joint_name="left_wheel2base_link" />
<xacro:joint_trans joint_name="right_wheel2base_link" />
<!-- controller -->
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<rosDebugLevel>Debug</rosDebugLevel>
<publishWheelTF>true</publishWheelTF>
<robotNamespace>/</robotNamespace>
<publishTf>1</publishTf>
<publishWheelJointState>true</publishWheelJointState>
<alwaysOn>true</alwaysOn>
<updateRate>100.0</updateRate>
<legacyMode>true</legacyMode>
<leftJoint>left_wheel2base_link</leftJoint> <!-- left wheel -->
<rightJoint>right_wheel2base_link</rightJoint> <!-- right wheel -->
<wheelSeparation>${base_radius * 2}</wheelSeparation> <!-- Wheel spacing -->
<wheelDiameter>${wheel_radius * 2}</wheelDiameter> <!-- Wheel diameter -->
<broadcastTF>1</broadcastTF>
<wheelTorque>30</wheelTorque>
<wheelAcceleration>1.8</wheelAcceleration>
<commandTopic>cmd_vel</commandTopic> <!-- Motion Control Topics -->
<odometryFrame>odom</odometryFrame>
<odometryTopic>odom</odometryTopic> <!-- Odometer topic -->
<robotBaseFrame>base_footprint</robotBaseFrame> <!-- Root coordinate system -->
</plugin>
</gazebo>
</robot>
src/mycar/urdf/xacro/car.urdf.xacro
<robot name="car" xmlns:xacro="http://wiki.ros.org/xacro">
<xacro:include filename="inertial_matrix.xacro" />
<xacro:include filename="car_base.urdf.xacro" />
<xacro:include filename="car_camera.urdf.xacro" />
<xacro:include filename="car_laser.urdf.xacro" />
<!-- 以下为新添加的部分 -->
<!-- move control -->
<xacro:include filename="../gazebo/move.xacro" />
</robot>
step4: 运行 gazebo
(1)在终端执行 roscore 指令
roscore
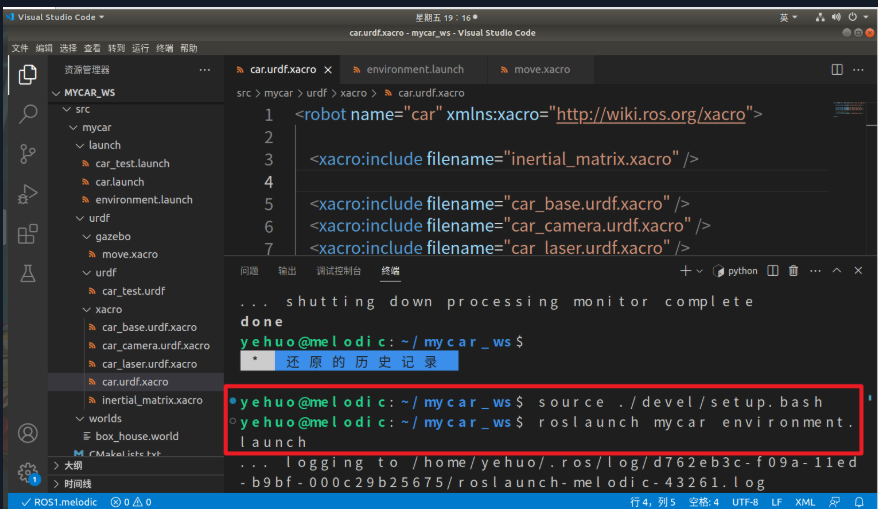
(2)在 vscode 中 编译启动 launch文件
source ./devel/setup.bash
roslaunch mycar environment.launch
(3)gazebo 打开后,再打开一个新终端
rosrun teleop_twist_keyboard teleop_twist_keyboard.py _speed:=0.3 _turn:=0.5
问题汇总
1、[rospack] Error: package 'teleop_twist_keyboard' not found
解决方法
2、运行 gazebo 报错
解决方法
(1)检查 src/mycar/urdf/xacro/car.urdf.xacro 中路径是否正确
(2)检查 src/mycar/urdf/gazebo/move.xacro 中 joint_name 等结点名称是否与之前定义的一致
使用键盘控制gazebo小车模型运动的更多相关文章
- [转]基于ROS平台的移动机器人-4-通过ROS利用键盘控制小车移动
原文出处: https://blog.csdn.net/Forrest_Z/article/details/55002484 准备工作 1.下载串口通信的ROS包 (1)cd ~/catkin_ws/ ...
- ros_indigo使用keyboard键盘控制虚拟或实际机器人
首先,上参考网址: http://wiki.ros.org/Robots/TIAGo http://wiki.ros.org/teleop_twist_keyboard 第一个,使用TIAGo的gaz ...
- 基于ROS和beaglebone的串口通信方式,使用键盘控制移动机器人
一.所需工具包 1.ROS键盘包:teleop_twist_keyboard 2.ROS串口通讯包:serial $ cd ~/catkin_ws/src $ git clone https://g ...
- OpenGL之路(八)加入�光照效果和键盘控制
在opengl中加入�光照的效果,可用键盘控制放大缩小 w键放大 s键缩小 d键开关灯 预览效果例如以下: 源代码例如以下: #include <gl/glut.h> #include & ...
- 基于VHDL利用PS2键盘控制的电子密码锁设计
基于VHDL利用PS2键盘控制的密码锁设计 附件:下载地址 中文摘要 摘 要:现代社会,人们的安全意识正在不断提升.按键密码锁由于其具有方便性.低成本等特征,还是大有用武之地的.但是通常的按键密码锁开 ...
- 【Unity3D】使用鼠标键盘控制Camera视角(即时战略类游戏视角):缩近,拉远,旋转
今天写一个demo,要用到鼠标键盘控制三维视角,因此写了个脚本用于控制. 该脚本可以用于即时战略类游戏的视角,提供了缩进,拉伸,旋转.同时按住鼠标右键不放,移动鼠标可以实现第一人称视角的效果. usi ...
- 求s=a+aa+aaa+aaaa+aa...a的值,其中a是一个数字。例如2+22+222+2222+22222(此时共有5个数相加),几个数相加有键盘控制。
package com.lw.HomeWork1;//包名 2 import java.util.Scanner; public class Demo18 { /** * @param args */ ...
- 再探 Ext JS 6 (sencha touch/ext升级版) 变化篇 (编译命令、滚动条、控制层、模型层、路由)
从sencha touch 2.4.2升级到ext js 6,cmd版本升级到6.0之后发生了很多变化 首先从cmd说起,cmd 6 中sencha app build package不能使用了,se ...
- 键盘控制div移动
<!DOCTYPE html><html lang="zh-CN"><head> <meta charset="UTF-8&qu ...
- js键盘控制div移动,解决停顿问题
问题版本代码如下: 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 <html> &l ...
随机推荐
- Pod的优雅上下线
Pod的优雅上下线依赖k8s的监控检查机制,以及 Pod lifecycle Hooks,通过这些kubernetes的机制,配合服务发现的流量管理机制,实现业务的优雅上下线. 基础概念 Pod 健康 ...
- G1原理—5.G1垃圾回收过程之Mixed GC
大纲 1.Mixed GC混合回收是什么 2.YGC可作为Mixed GC的初始标记阶段 3.Mixed GC并发标记算法详解(一) 4.Mixed GC并发标记算法详解(二) 5.Mixed GC并 ...
- 第三章 dubbo源码解析目录
7.6 服务远程暴露 - 注册服务到zookeeper 为了安全:服务启动的ip全部使用10.10.10.10 远程服务的暴露总体步骤: 将ref封装为invoker 将invoker转换为expor ...
- codeblocks快捷键注释
ctrl+shift+c可以快速注释掉多行. ctrl+shift+x可以取消注释
- uniapp去修改vuex中state中的值
修改state中的值 修改state中的值,方法 (1) 在mutations中写修改state的api. (2)写好之后,直接store.commit("changeValue" ...
- uni-app之条件编译
ifdef 仅出现在XXx平台上 仅出现在 App 平台下的代码 #ifdef APP-PLUS 需条件编译的代码 #endif <!-- 只在H5上有哈 --> <!-- #ifd ...
- 最大流的 Dinic 算法和 ISAP 算法
上期回顾:https://www.cnblogs.com/ofnoname/p/18678895 之前我们已经介绍了最大流问题的基本定义.最大流最小割定理.增广路径与残量网络的构建方法,以及如何利用这 ...
- Linux 服务器防火墙开放端口命令(iptables、firewalld和ufw)
本文主要介绍Linux中,Centos.Ubuntu和Debian开放防火墙端口的命令(iptables.firewalld和ufw)方法. 1.Centos中开放端口 1.systemctl sta ...
- oracle 常用函数2
1.ASCII 2 2.CHR. 2 3.CONCAT. 2 4.INITCAP. 2 5.INSTR(C1,C2,I,J) 3 6.LENGTH *. 3 7.LOWER. 3 8.UPPER. 3 ...
- 理解ID3决策树
决策树是一个树形结构,类似下面这样: 上图除了根节点外,有三个叶子节点和一个非叶子节点. 在解决分类问题的决策树中,叶子节点就表示所有的分类,比如这里的分类就有3种:无聊时阅读的邮件.需及时处理的邮件 ...