Vivado与SDK的联合调试方法-使用ILA

首先介绍一下我的硬件平台:使用的开发板为米联客出的MIZ702,这个开发板与ZedBoard是兼容的。
Vivado硬件调试有几种手段:ILA(集成逻辑分析器Integrated Logic Analyzer)、VIO(虚拟I/O Virtual Input/Output)、Jtag-to-AXI等,本方法主要使用了ILA 。
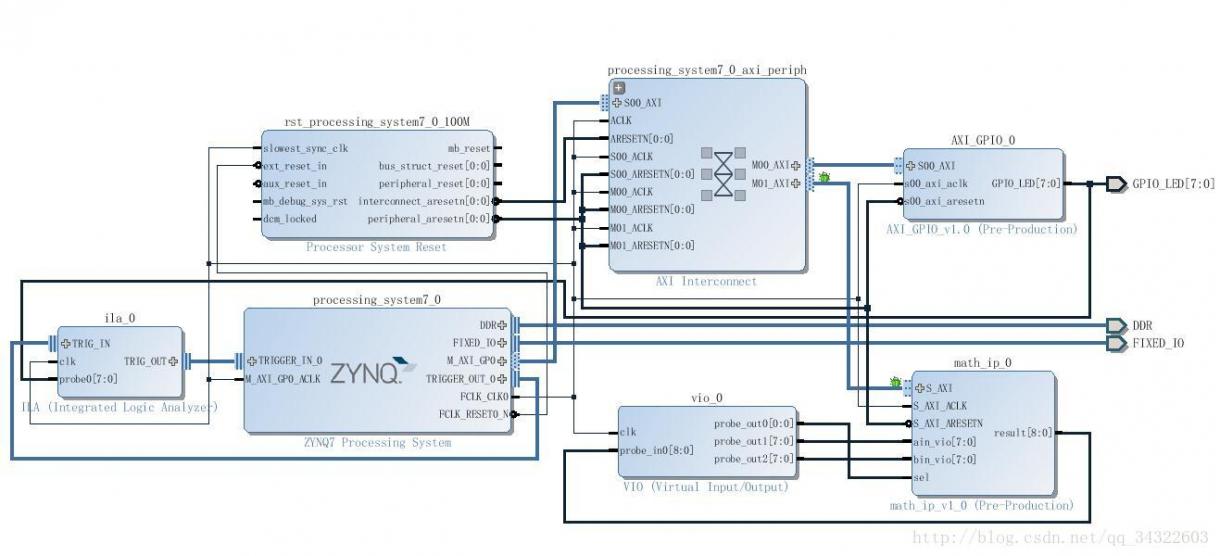
本实验系统使用了两种调试手段:ILA和VIO,ILA的引入方式又用了两种,一种是标记Debug mark,一种是添加ILA_IP两种方式我认为是一致的。其中ILA-IP抓取的LED的寄存器的波形,而Debug mark标记的是接到一个自主IP的AXI总线系统的Block Design如下图
联调步骤:
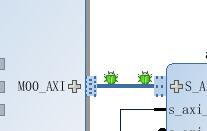
STEP1:在block design设计完系统硬件后,点击想要抓取波形的网络,右击选择mark debug,此时网络两端会显示一个Debug标识如下图,保存。
还有另外一种方法:直接添加ILA ip,设置好抓取波形的个数与每组波形的位宽,连接自己想要观测的总线,在这里我抓取的波形是一组8位的寄存器,所控制的是8个LED灯。如下两图

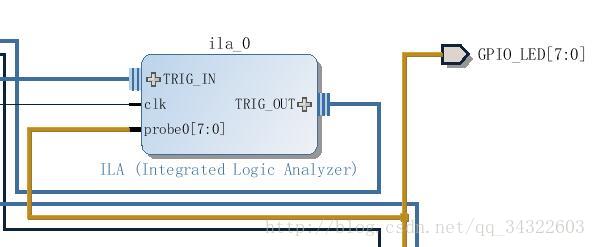
我认为这两种方法没有区别
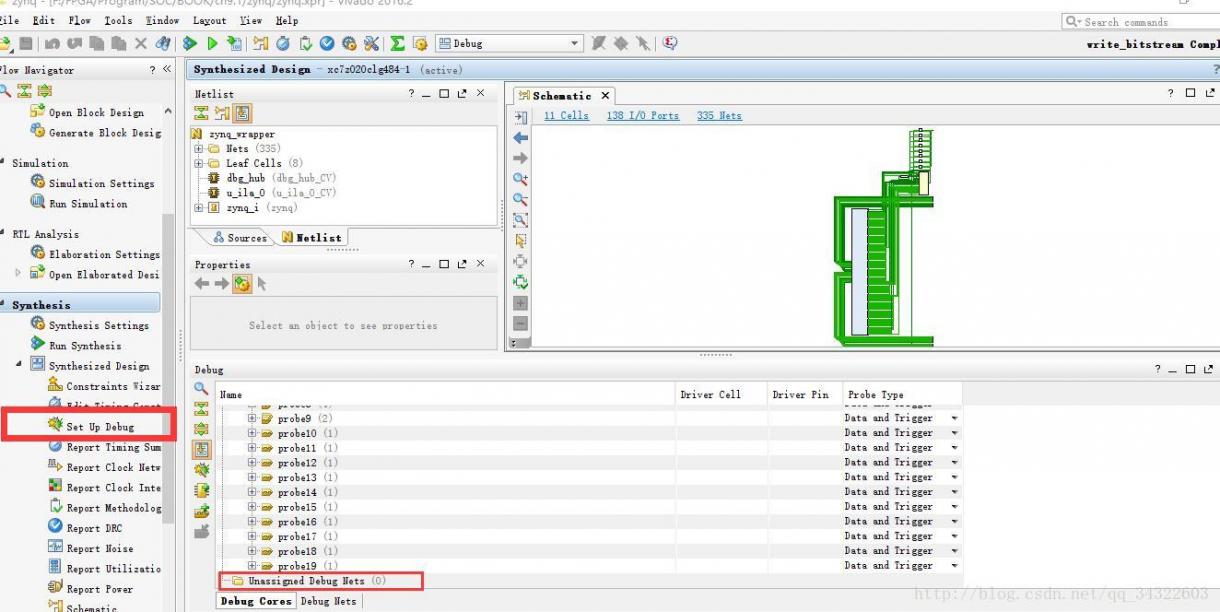
STEP2:对工程进行综合,综合完成后查看综合结果,可以看到下面的debug窗口中有未连接的Debug nets,点击Set up Debug并进行相关配置完成Debug nets的连接。完成后如下图所示:
STEP3:保存工程,此时系统会重新生成约束文件,对现有的约束文件进行填充,打开约束文件进行Reload即可,然后生成bitstream并将硬件导入SDK,运行SDK。
STEP4:在SDK中新建自己的调试应用程序,我的演示程序为流水灯主函数代码如下:
#include "xparameters.h" /* Peripheral parameters */
#include "xgpio.h" /* GPIO data struct and APIs */
#include "xil_printf.h"
#include "xil_cache.h"
#define GPIO_BITWIDTH 8 /* This is the width of the GPIO */
#define GPIO_DEVICE_ID XPAR_AXI_GPIO_0_DEVICE_ID //device id
#define LED_DELAY 10000000 /* times delay*/
#define LED_MAX_BLINK 0x1 /* Number of times the LED Blinks */
#define LED_CHANNEL 1 /* GPIO channel*/
#define printf xil_printf /* A smaller footprint printf */
XGpio Gpio; /* The Instance of the GPIO Driver */
XGpio GpioOutput; /* The driver instance for GPIO Device configured as O/P */
int GpioMarquee (u16 DeviceId, u32 GpioWidth)
{
volatile int Delay;
u32 LedBit;
u32 LedLoop;
int Status;
/*
* Initialize the GPIO driver so that it's ready to use,
* specify the device ID that is generated in xparameters.h
*/
Status = XGpio_Initialize(&GpioOutput, DeviceId);
if (Status != XST_SUCCESS) {
return XST_FAILURE;
}
//Set the direction for all signals to be outputs
XGpio_SetDataDirection(&GpioOutput, LED_CHANNEL, 0x0);
// Set the GPIO outputs to low
XGpio_DiscreteWrite(&GpioOutput, LED_CHANNEL, 0x0);
for (LedBit = 0x0; LedBit < GpioWidth; LedBit++) {
for (LedLoop = 0; LedLoop < LED_MAX_BLINK; LedLoop++) {
//Set the GPIO Output to High
XGpio_DiscreteWrite(&GpioOutput, LED_CHANNEL,
1 << LedBit);
//Wait a small amount of time so the LED is visible
for (Delay = 0; Delay < LED_DELAY; Delay++);
//Clear the GPIO Output
XGpio_DiscreteClear(&GpioOutput, LED_CHANNEL,
1 << LedBit);
// Wait a small amount of time so the LED is visible
for (Delay = 0; Delay < LED_DELAY; Delay++);
}
}
return XST_SUCCESS;
}
int main(void)
{//Application start
/* loop forever*/
while(1){
u32 status;
status = GpioMarquee (GPIO_DEVICE_ID,GPIO_BITWIDTH);
if (status == 0)
print("SUCESS!.\r\n");
else print("FAILED.\r\n");
}
return XST_SUCCESS;
}
然后常规方法进入软件调试界面,设置断点。(这里提醒一下,联合调试一定要在SDK下将比特流下载到FPGA中,而不要在vivado中下载比特流。Xilinx官方给出的解释是:由于使用PS端的时钟来接入ILA,所以要现在SDK中将比特流进行下载)
STEP5:在Vivado中连接目标板,此时进入硬件调试界面如图
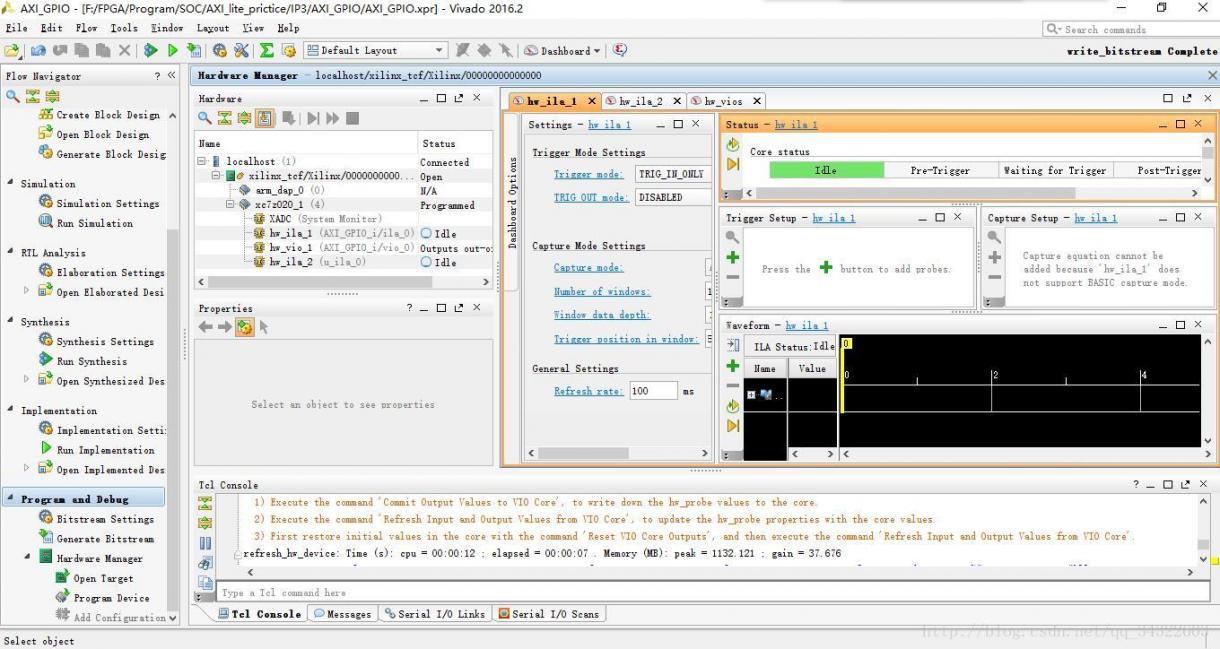
左边栏hardware会显示系统添加的硬件调试IP,我的硬件中手动加入了一个ila ip和vio ip也将一段总线标记了mark debug,标记了mark debug的总线,在进行set up debug的操作时系统会自动添加一个ila ip,左边栏显示了三个调试ip。
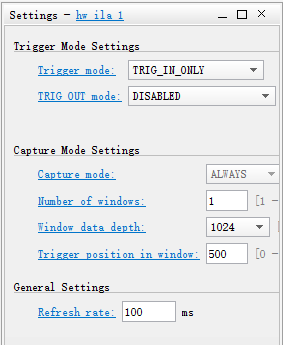
这里面大大小小有好多窗口一一介绍一下:
1、设置窗口,window data depth其实就是波形的分辨率,trigger position in window就是数据的触发在波形中显示的起始位置,设置了触发后才会有作用。
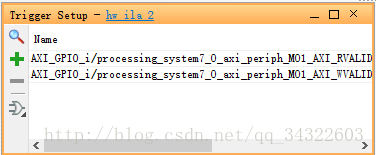
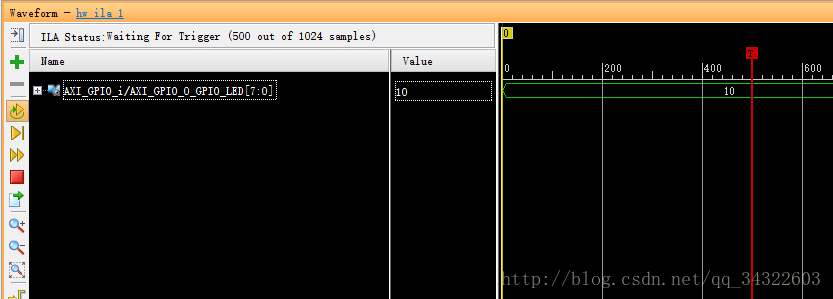
2、触发设置窗口,可以设置触发信号,以及触发方式(上升沿、下降沿)等等。若在SDK中的命令执行一句的过程中FPGA有时序变化,且时序是相关的,比如说我的写操作,当write有上升沿的时候执行,对目标地址写操作数。这时候如果设置了触发信号为write,系统的时序显示就会随着write进行动作,且在触发位置处进行改变。这个功能我们可以进行一些总线的时序分析。ILA2中检测了AXI总线,我们就可以看到相关时序图。ILA1只是对一个寄存器进行了监视,只能看到他的值的变化而已。
3、状态窗口:显示当前调试状态
4、调试波形窗口

大家调试不必按照此硬件系统和软件来调试,完全可以在自己的系统中添加ILA-IP来对自己的系统进行调试
欢迎大家批评指正,也希望能与大家交流ZYNQ的学习经验。
参考文献:
1、嵌入式系统软硬件协同设计实战指南-基于Xilinx ZYNQ
2、ug936-vivado-tutorial-programming-debugging
本文转载自:qq_34322603的博客
Vivado与SDK的联合调试方法-使用ILA的更多相关文章
- 痞子衡嵌入式:大话双核i.MXRT1170之在线联合调试双核工程的三种方法(IAR篇)
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家分享的是i.MXRT1170下在线联合调试双核工程的方法(基于IAR). 前段时间痞子衡写过一篇<双核i.MXRT1170之单独在线调试从 ...
- vivado和modelsim联合调试仿真
vivado和modelsim联合调试仿真 0赞 发表于 2017/5/10 19:10:59 阅读(881) 评论(0) 使用vivado和modelsim联合调试仿真时,在破解完modelsim后 ...
- LeanCloud SDK 中秒杀70%问题的调试方法
非常多同学在LeanCloud上遇到的不少问题,事实上能够自我解决的,如今介绍一下LeanCloud上的调试方法. LeanCloud 是通过 REST API来进行前后端分离的.这意味着当出现故障的 ...
- NDK开发历程(一):android native code的调试方法
引用:http://www.cnblogs.com/ychellboy/archive/2013/02/22/2922683.html 使用NDK在android上做开发是一件“痛并快乐着”的差事,之 ...
- Jni 调试 : eclipse + Vs 联合调试
摘要: 本文原创,转载请注明地址 http://www.cnblogs.com/baokang/p/4982640.html 1.在Eclipse 中,Java 类中链接库引用到vs的debug目录下 ...
- Linux内核调试方法总结【转】
转自:http://my.oschina.net/fgq611/blog/113249 内核开发比用户空间开发更难的一个因素就是内核调试艰难.内核错误往往会导致系统宕机,很难保留出错时的现场.调试内核 ...
- 【转】Linux内核调试方法总结
目录[-] 一 调试前的准备 二 内核中的bug 三 内核调试配置选项 1 内核配置 2 调试原子操作 四 引发bug并打印信息 1 BUG()和BUG_ON() 2 dump_sta ...
- 工具使用——MATLAB基本调试方法
作者:桂. 时间:2017-02-28 07:06:30 链接:http://www.cnblogs.com/xingshansi/articles/6477185.html 声明:转载请注明出处, ...
- Linux内核调试方法总结
Linux内核调试方法总结 一 调试前的准备 二 内核中的bug 三 内核调试配置选项 1 内核配置 2 调试原子操作 四 引发bug并打印信息 1 BUG()和BUG_ON() 2 ...
随机推荐
- Java的静态成员类
Java的静态成员类: 1.静态成员类是最简单的嵌套类.最好把它看成一个普通的类,只是碰巧被声明在另一个类的内部而已,它可以访问外围类的所以成员,包括那些声明为私有的成员. 2.静态成员类是外围类的一 ...
- android使用百度地图SDK获取定位信息
本文使用Android Studio开发. 获取定位信息相对简单.我们仅仅须要例如以下几步: 第一步,注冊百度账号,在百度地图开放平台新建应用.生成API_KEY.这些就不细说了,请前往这里:titl ...
- 【shell】各种括号()、(())、[]、[[]]、{}的使用
圆括号 1.单圆括号() ①命令组,括号中的命令将会开启一个子shell独立运行:括号中以分号连接,最后一个命令不需要;各命令和括号无需空格 Linux:/qins # (var=1;echo $va ...
- 基于源码编译openssl
openssh依赖于openssl,由于ssl频繁曝出漏洞,牵扯到openssh.而自身也存在漏洞... 00.下载openssl https://www.openssl.org/source/ ht ...
- java正则表达式去除html中所有的标签和特殊HTML字符(以&开头的)
来源于:https://www.androiddev.net/java%E6%AD%A3%E5%88%99%E8%A1%A8%E8%BE%BE%E5%BC%8F%E5%8E%BB%E9%99%A4ht ...
- CocoaAsyncSocket UDP发送数据超过包大小限制(Message too long)
最近在做iOS上,基于UDP传输音视频时遇到的一个问题,这边纪录一下: 由于考虑实时性比较高,所以采用了 CocoaAsyncSocket 的UDP框架来实现,将视频切割成一帧帧的图片发给服务端,不过 ...
- BigDecimal的用法详解(保留两位小数,四舍五入,数字格式化,科学计数法转数字,数字里的逗号处理)
转自:https://blog.csdn.net/ochangwen/article/details/51531866 一.简介 Java在java.math包中提供的API类BigDecimal,用 ...
- 谈谈选用技术的原则,技术学习方法技巧,阅读代码的技巧及其它 MSF的一点心得
谈谈技术原则,技术学习方法,代码阅读及其它(正文) 这篇文章是前一阵在水木BBS上和别人讨论中偶自己发言的摘编,是偶这几年开发过程完全经验式的总结.完全个人经验,供批判. 一.选用技术的原则 比较规范 ...
- 纯CSS兑现侧边栏/分栏高度自动相等(转)
这里直接介绍我认为的最佳的侧边栏/分栏高度自动相等方法.核心的CSS代码如下(数值不固定): margin-bottom:-3000px; padding-bottom:3000px; 再配合父标签的 ...
- C# winform DataGridView 常见属性
C# winform DataGridView 属性说明① 取得或者修改当前单元格的内容 ② 设定单元格只读 ③ 不显示最下面的新行 ④ 判断新增行 ⑤ 行的用户删除操作的自定义 ⑥ 行.列的隐藏和删 ...