蓝牙4.0模块,AT指令集
一,LED状态

二,蓝牙模块有两种通信模式
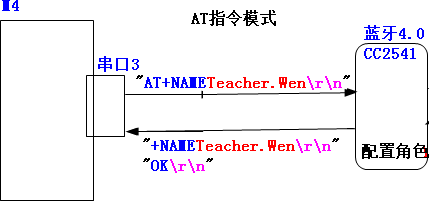
1,AT指令模式

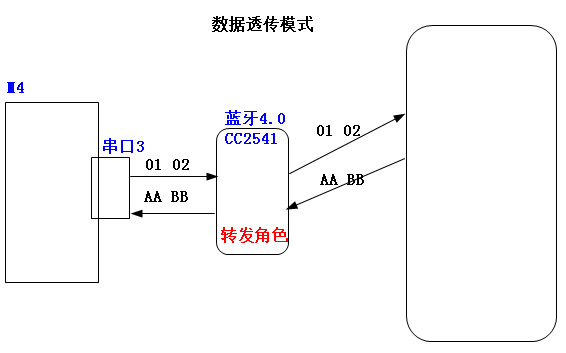
2,数据透传模式
三、AT指令程序设计
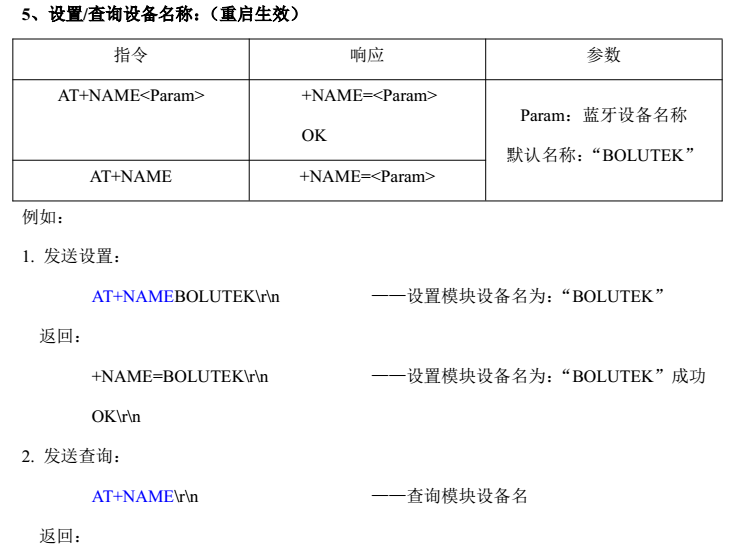
1、设置模块的名字
void usart3_send_str(char *pbuf)
{
while(pbuf && *pbuf)
{
USART_SendData(USART3,*pbuf++);
while(USART_GetFlagStatus(USART3,USART_FLAG_TXE)==RESET);
}
} void ble_set_config(void)
{
//配置模块的名字
usart3_send_str("AT+NAMETeacher.Wen\r\n");
delay_ms();
}
#include "stm32f4xx.h"
#include "stm32f4xx_gpio.h"
#include "stm32f4xx_rcc.h"
#include "stm32f4xx_usart.h"
#include "stdio.h" static GPIO_InitTypeDef GPIO_InitStructure;
static USART_InitTypeDef USART_InitStructure;
static NVIC_InitTypeDef NVIC_InitStructure; void delay_us(uint32_t nus)
{
uint32_t temp;
SysTick->LOAD =SystemCoreClock//*nus; //时间加载
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //使能滴答定时器开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(<<))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
} void delay_ms(uint16_t nms)
{
uint32_t temp;
SysTick->LOAD=SystemCoreClock//*nms; //时间加载(SysTick->LOAD为24bit)
SysTick->VAL =0x00; //清空计数器
SysTick->CTRL|=SysTick_CTRL_ENABLE_Msk ; //能滴答定时器开始倒数
do
{
temp=SysTick->CTRL;
}while((temp&0x01)&&!(temp&(<<))); //等待时间到达
SysTick->CTRL&=~SysTick_CTRL_ENABLE_Msk; //关闭计数器
SysTick->VAL =0X00; //清空计数器
} void LED_Init(void)
{ //使能GPIOE,GPIOF时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOE | RCC_AHB1Periph_GPIOF, ENABLE); //GPIOF9,F10初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //LED0和LED1对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式,
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出,驱动LED需要电流驱动
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOF, &GPIO_InitStructure); //初始化GPIOF,把配置的数据写入寄存器 //GPIOE13,PE14初始化设置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_13 | GPIO_Pin_14; //LED2和LED3对应IO口
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT; //普通输出模式
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz; //100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOE, &GPIO_InitStructure); //初始化GPIOE,把配置的数据写入寄存器 GPIO_SetBits(GPIOF,GPIO_Pin_9 | GPIO_Pin_10); //GPIOF9,PF10设置高,灯灭
GPIO_SetBits(GPIOE,GPIO_Pin_13 | GPIO_Pin_14);
} void USART1_Init(uint32_t baud)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA,ENABLE); //使能GPIOA时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE); //使能USART1时钟 //串口1对应引脚复用映射
GPIO_PinAFConfig(GPIOA,GPIO_PinSource9,GPIO_AF_USART1); //GPIOA9复用为USART1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource10,GPIO_AF_USART1); //GPIOA10复用为USART1 //USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9 | GPIO_Pin_10; //GPIOA9与GPIOA10
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOA,&GPIO_InitStructure); //初始化PA9,PA10 //USART1 初始化设置
USART_InitStructure.USART_BaudRate = baud; //波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART1, &USART_InitStructure); //初始化串口1 USART_Cmd(USART1, ENABLE); //使能串口1 USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); //开启相关中断 //Usart1 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART1_IRQn; //串口1中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
} void USART3_Init(uint32_t baud)
{
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOB,ENABLE); //使能GPIOB时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART3,ENABLE); //使能USART3时钟 //串口3对应引脚复用映射
GPIO_PinAFConfig(GPIOB,GPIO_PinSource10,GPIO_AF_USART3); //GPIOB10复用为USART3
GPIO_PinAFConfig(GPIOB,GPIO_PinSource11,GPIO_AF_USART3); //GPIOB11复用为USART3 //USART1端口配置
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11; //GPIOB10与GPIOB11
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF; //复用功能
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; //速度50MHz
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP; //推挽复用输出
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP; //上拉
GPIO_Init(GPIOB,&GPIO_InitStructure); //初始化PB10,PB11 //USART1 初始化设置
USART_InitStructure.USART_BaudRate = baud; //波特率设置
USART_InitStructure.USART_WordLength = USART_WordLength_8b; //字长为8位数据格式
USART_InitStructure.USART_StopBits = USART_StopBits_1; //一个停止位
USART_InitStructure.USART_Parity = USART_Parity_No; //无奇偶校验位
USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None; //无硬件数据流控制
USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx; //收发模式
USART_Init(USART3, &USART_InitStructure); //初始化串口3 USART_Cmd(USART3, ENABLE); //使能串口3 USART_ITConfig(USART3, USART_IT_RXNE, ENABLE); //开启相关中断 //Usart3 NVIC 配置
NVIC_InitStructure.NVIC_IRQChannel = USART3_IRQn; //串口3中断通道
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=; //抢占优先级3
NVIC_InitStructure.NVIC_IRQChannelSubPriority =; //子优先级3
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道使能
NVIC_Init(&NVIC_InitStructure); //根据指定的参数初始化VIC寄存器
} //重定义fputc
int fputc(int ch,FILE *f)
{
USART_SendData(USART1,ch);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET); return ch;
} void usart1_send_bytes(uint8_t *pbuf,uint32_t len)
{
while(len--)
{
USART_SendData(USART1,*pbuf++);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
} void usart1_send_str(char *pbuf)
{
while(pbuf && *pbuf)
{
USART_SendData(USART1,*pbuf++);
while(USART_GetFlagStatus(USART1,USART_FLAG_TXE)==RESET);
}
} void usart3_send_bytes(uint8_t *pbuf,uint32_t len)
{
while(len--)
{
USART_SendData(USART3,*pbuf++);
while(USART_GetFlagStatus(USART3,USART_FLAG_TXE)==RESET);
}
} void usart3_send_str(char *pbuf)
{
while(pbuf && *pbuf)
{
USART_SendData(USART3,*pbuf++);
while(USART_GetFlagStatus(USART3,USART_FLAG_TXE)==RESET);
}
} void ble_set_config(void)
{
//配置模块的名字
usart3_send_str("AT+NAMEHELLO\r\n");
delay_ms();
} int main(void)
{ LED_Init(); //系统定时器初始化,时钟源来自HCLK,且进行8分频,
//系统定时器时钟频率=168MHz/8=21MHz
SysTick_CLKSourceConfig(SysTick_CLKSource_HCLK_Div8); //设置中断优先级分组2
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //串口1,波特率115200bps,开启接收中断
USART1_Init(); printf("hello ble at test\r\n"); //串口3,波特率9600bps,开启接收中断,蓝牙模块出厂设置为9600bps
USART3_Init(); ble_set_config(); while()
{ }
} void USART1_IRQHandler(void) //串口1中断服务程序
{
uint8_t d; if(USART_GetITStatus(USART1, USART_IT_RXNE) != RESET) //接收中断
{
//接收数据
d = USART_ReceiveData(USART1); //发送数据
usart3_send_bytes(&d,); } } void USART3_IRQHandler(void) //串口3中断服务程序
{
uint8_t d; if(USART_GetITStatus(USART3, USART_IT_RXNE) != RESET) //接收中断
{
//接收数据
d = USART_ReceiveData(USART3); //发送数据
usart1_send_bytes(&d,); } }
main.c
蓝牙4.0模块,AT指令集的更多相关文章
- RF-BM-S02(V1.0)蓝牙4.0模块 使用手册
一.产品概述 图1 RF-BM-S02纯硬件模块 RF-BM-S02是一款采用美国德州仪器TI 蓝牙4.0 CC2540作为核心处理器的高性能.超低功耗(Bluetooth Low Energy)射频 ...
- 信驰达蓝牙4.0模块全面升级 v2.20 U最新发布
作为国际蓝牙联盟成员之一,德州仪器(TI)于2012年强势推出CC254X系列单芯片(SOC)低功耗蓝牙收发器,经典51内核,最强优势在于丰富的外围(21个IO,UART,SPI,USB2.0,PWM ...
- 蓝牙4.0模块控制LED彩灯调光调色经验之谈
基于蓝牙模块的智能LED彩灯调光调色控制思路如下: 在此,找一个低功耗蓝牙模块内嵌接入LED灯的控制电路板,接入LED彩灯的控制电路中. 蓝牙模块彩灯控制方式如下,本文两类来解说led灯的控制方式: ...
- 基于蓝牙4.0(Bluetooth Low Energy)胎压监测方案设计
基于一种新的蓝牙技术——蓝牙4.0(Bluetooth Low Energy)新型的胎压监测系统(TPMS)的设计方案.鉴于蓝牙4.0(Bluetooth Low Energy)的低成本.低功耗.高稳 ...
- 蓝牙4.0(BLE)开发
转载请注明出处 http://blog.csdn.net/pony_maggie/article/details/26740237 作者:小马 IOS学习也一段时间了,该上点干货了.前段时间研究了一下 ...
- IOS学习之蓝牙4.0 BLE
IOS学习也一段时间了,该上点干货了.前段时间研究了一下IOS蓝牙通讯相关的东西,把研究的一个成果给大家分享一下. 一 项目背景 简单介绍一下做的东西,设备是一个金融刷卡器,通过蓝牙与iphone手机 ...
- iOS蓝牙BLE4.0通信功能
概述 iOS蓝牙BLE4.0通信功能,最近刚学的苹果,为了实现蓝牙门锁的项目,找了一天学习了下蓝牙的原理,亲手测试了一次蓝牙的通信功能,结果成功了,那么就把我学习的东西分享一下. 详细 代码下载:ht ...
- Android5.0(Lollipop) BLE蓝牙4.0+浅析demo连接(三)
作者:Bgwan链接:https://zhuanlan.zhihu.com/p/23363591来源:知乎著作权归作者所有.商业转载请联系作者获得授权,非商业转载请注明出处. Android5.0(L ...
- IN612 IN612L蓝牙5.0 SoC芯片替换NRF52832/NRF52840
IN612L是美国公司INPLAY的SOC产品系列之一,具有多模协同2.4G无线协议栈,支持2.4G私有协议栈以及蓝牙5.0全协议栈的SOC芯片.如2mbps高数据速率模式,125kbps/500kb ...
随机推荐
- ajax post上传数据时,前端出现的跨域权限问题:ccess to XMLHttpRequest at ‘’rom origin 'null' has been blocked by CORS policy: Response to preflight request doesn't pass access control check: It does not have HTTP ok st
本人前端使用多个框架时,jq ajax传参出现如下报错: 最后发现,可能是xhr的相关默认参数被修改了.顾使用jq 传参时,一直报错,jq ajax额外添加的关键参数: crossDomain: ...
- 解决https 请求过程中SSL问题
最近一个项目中用到了https的请求,在实际调用过程中发现之前的http方法不支持https,调用一直报错. 查询了一下,添加几行代码解决问题. public string HttpPost(stri ...
- 基于PhotoView的头像/圆形裁剪控件
常见的图片裁剪有两种,一种是图片固定,裁剪框移动放缩来确定裁剪区域,早期见的比较多,缺点在于不能直接预览裁剪后的效果:还有一种现在比较普遍了,就是裁剪框固定,直接拖动缩放图片,便于预览裁剪结果. 我做 ...
- iOS圆弧渐变进度条的实现
由于项目需要一个环形渐变进度条显示课程,这方便网上的确有很多相关资料但是,都是比较零散的而且,大多数只是放一堆代码就算完了.这里我想详细写一篇我自己实现这个进度条的过程. 实现一个圆弧进度条主要分为三 ...
- c#重写了窗体的OnKeyDown事件,但是不执行
设置下窗体的KeyPreview属性值为True即可 总结:遇到类似这样的问题,比如其他窗体运行没问题,就新建的窗体有问题.应该检查下窗体的属性.
- struct 和class到底有什么区别
我们知道struct是C语言的宠儿,当需要一个复杂类型的时候就需要定义一个struct 比如一个学生结构体,含有三个属性,分别是编号.名字和年龄. typedef struct Student { i ...
- eclipse导入项目后出现红色叉号的解决方案
对于一名程序员来说,我导入的项目在项目的名称上无端加了一个红色的叉号,虽然这个不友好的符号,对于我整个的项目运行没有任何影响,但是总让我觉得不舒服,大大的叉号写在我的项目的脑袋上,我心里能舒服吗?于是 ...
- man手册--iostat
iostat手册 IOSTAT(1) Linux User's Manual IOSTAT(1) NAME iostat - Report Central Processing Unit (CPU) ...
- DAY1注册店铺
- 【python】发送邮件,含附件
def send_mail(_user,_pwd,_to): # f = open(file_new,'rb') # mail_body = f.read() # f.close() # 读取最新测试 ...