stm32 usart 异步传输示例
STM32F103xE的USART异步数据传输示例
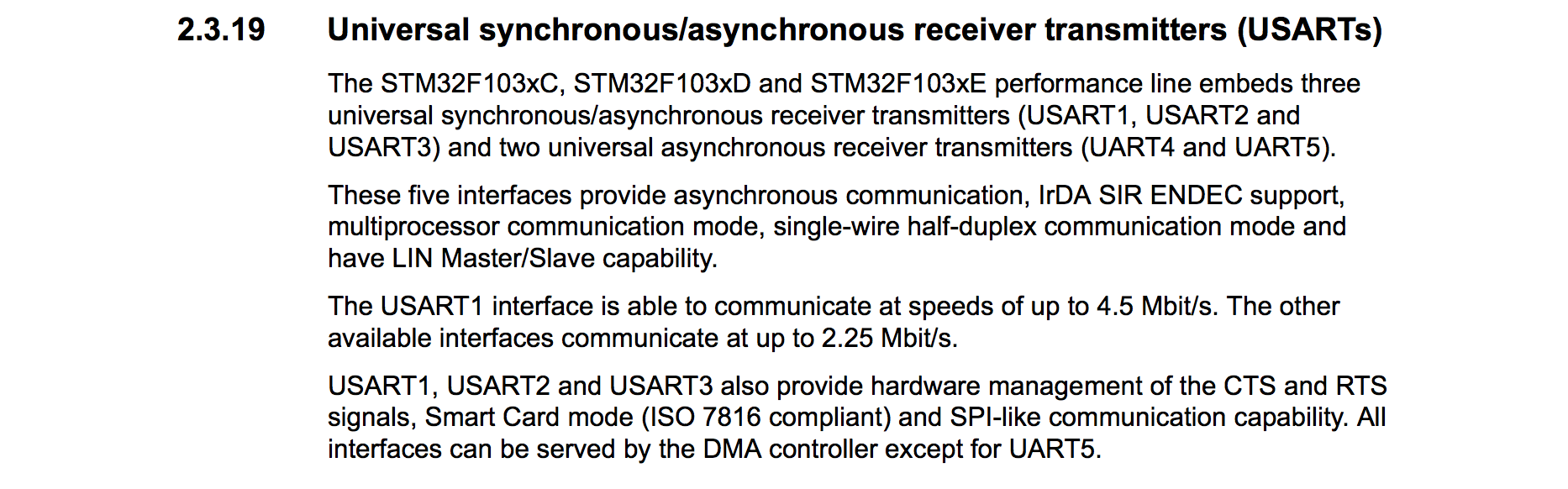
USART全称Universal Synchronous/Asynchronous Receiver/Transmitter,是一种可以进行同步/异步通信的串行设备接口。
通过查阅STM32官方手册得之,STM32f10x系列一共有五个USART传输串口。其中USART1、USART2、USART3为同步/异步串行通信接口,USART4、USART5为异步串行通信接口。
STM32外设的初始化步骤基本上是:
- 使能外设时钟
- 配置外设所需要的I/O端口
- 配置外设
- 使能外设
根据这个步骤首先我们使能外设时钟
使能外设时钟
查阅手册
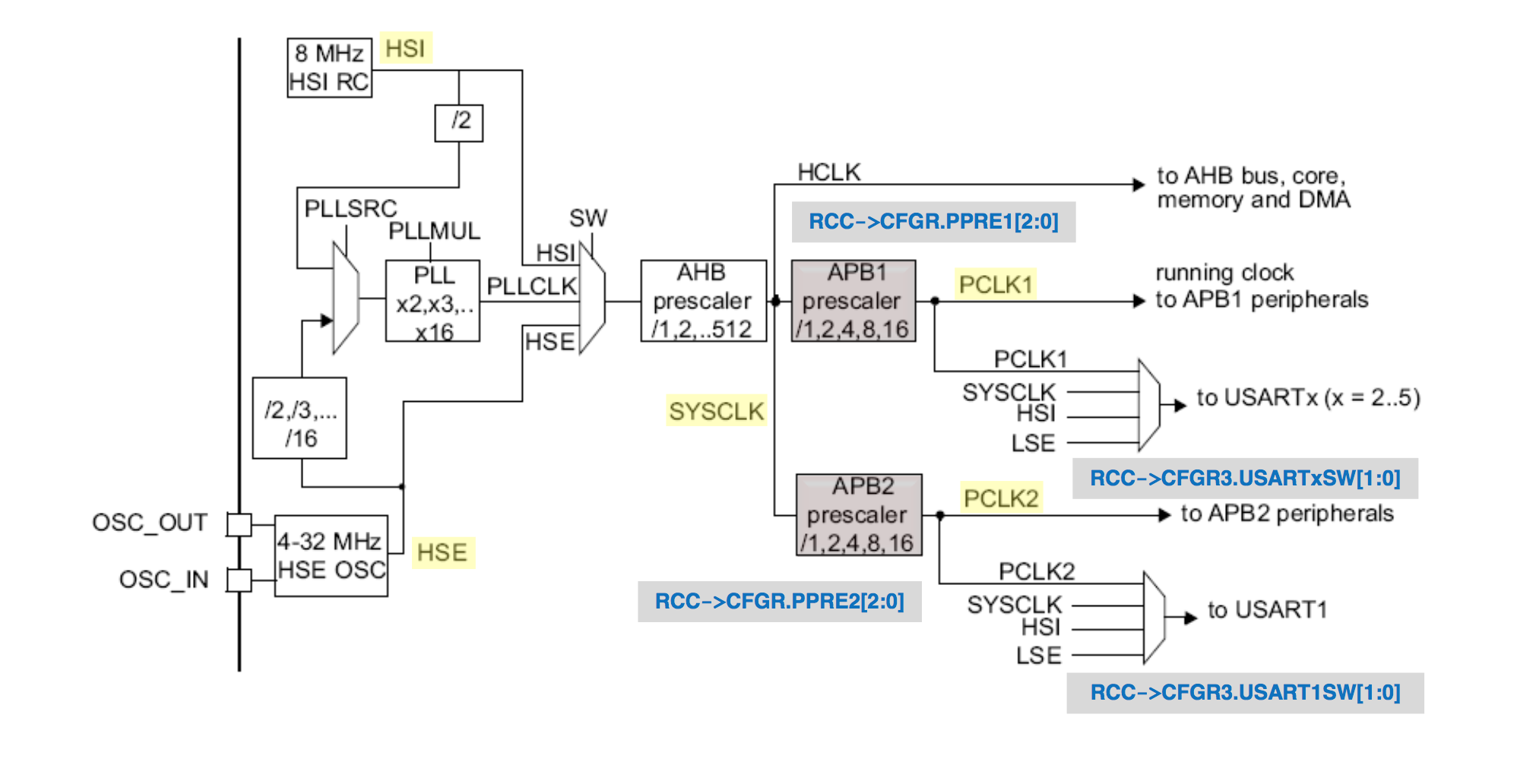
通过该图我们看到USART1位于总线APB2上面,而USART2、3和UART4、5位于总线APB1上面。
因此我们开启USART1的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);//开启USART1时钟
配置外设所需I/O端口
通过查阅STM32官方手册得之,STM32f10x系列一共有五个USART传输串口。其中USART1、USART2、USART3为同步/异步串行通信接口,USART4、USART5为异步串行通信接口。
在这里我们将使用USART1同步/异步串行通信接口为例,进行介绍。既然想通过USART1通信接口发送数据,那肯定GPIO引脚呀,因此继续在官方手册中查找
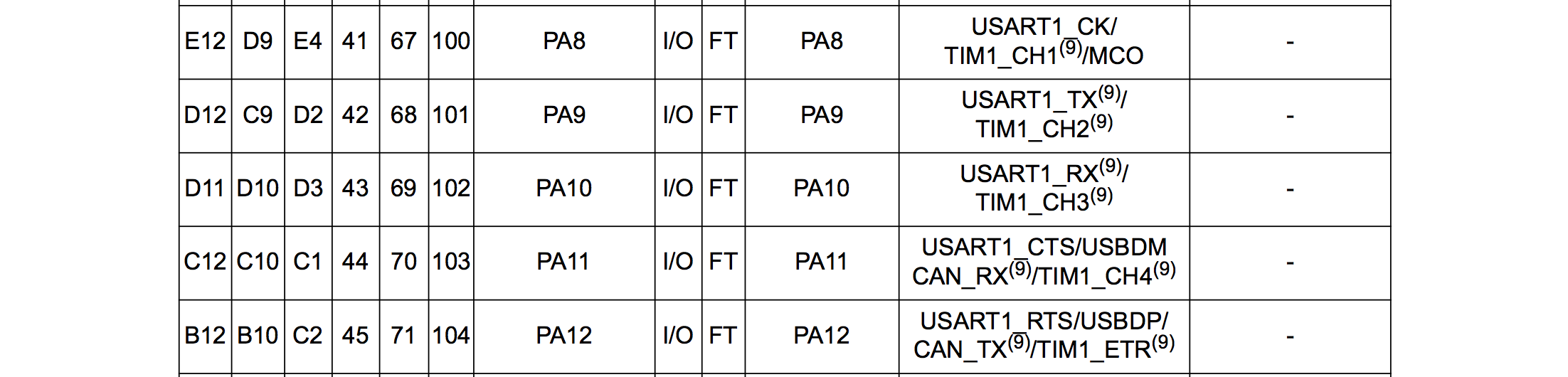
该表格清楚明了的说明了USART1的各个引脚。其中TX(Transmit data发送数据输出)、RX(Receive data接受数据输入)、CK(Clock发送时钟输出)、CTS(Clear to Send允许发送)、RTS(Request to Send请求发送)分别对应于PA09、PA10、PA08、PA11、PA12。
因此我们配置I/O端口:
GPIO_InitTypeDef GPIO_InitStrue;
//时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
//GPIO10使能TX
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_10; //10脚
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_50MHz;//IO口速度为50MHz
GPIO_Init(GPIOB,&GPIO_InitStrue); //根据设定参数初始化GPIOB_10
//GPIO10使能RX
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_11;//11脚
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_50MHz;//IO口速度为50MHz
GPIO_Init(GPIOB,&GPIO_InitStrue); //根据设定参数初始化GPIOB_11
配置外设
在这里外设当然是USART1啦。我们只需要根据自己的需要配置就行啦。主要的配置项有波特率,有无硬件控制流,发送/接受,有无奇偶校验,停止位,数据位。
其中波特率指的是数据传输到速度指每秒钟发送多少bit的数据;硬件控制流指是否通过CTS和RTS控制数据传输;有无奇偶校验则比较简单就是是否对传输的数据进行奇偶校验;因为USART接口传输需要对数据进行封装,即在原有的数据中加上开始位,在原始数据的尾部加上停止位,因此停止位值得就是停止位的长度;数据位指的是每次传输中有效数据的长度。
一个配置的示例:
USART_InitStrue.USART_BaudRate=9600;//波特率9600
USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//无硬件流控制
USART_InitStrue.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;//使能发送、接收
USART_InitStrue.USART_Parity=USART_Parity_No;//无基偶校验
USART_InitStrue.USART_StopBits=USART_StopBits_1;//停止位1位
USART_InitStrue.USART_WordLength=USART_WordLength_8b;//数据8位
USART_Init(USART1,&USART_InitStrue);//根据设定初始化USART1
使能外设
直接使能USART即可
USART_Cmd(USART1,ENABLE);
接下来配置USART1的中断
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//开中断USART1
NVIC_InitStrue.NVIC_IRQChannel=USART1_IRQn;//通道
NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE;//使能
NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1;//抢占优先级
NVIC_InitStrue.NVIC_IRQChannelSubPriority=1;//子优先级
NVIC_Init(&NVIC_InitStrue);
以及中断服务函数
在该函数中我们首先判断中断类型,是否为接受中断;如果是接受中断则接受字符并通过USART1发送出去,最后我们使用了一个while函数来确保数据成功发送。
//中断服务函数
void USART1_IRQHandler(void)
{
u8 USART1_in;
if(USART_GetITStatus(USART1,USART_IT_RXNE))
{
USART1_in=USART_ReceiveData(USART1);
USART_SendData(USART1, USART1_in);//向串口3发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
}
}
废话少说,直接上最终代码
配置IO引脚、USART、中断向量优先级等参数:
//串口初始化
void USART1_init()
{
GPIO_InitTypeDef GPIO_InitStrue;
USART_InitTypeDef USART_InitStrue;
NVIC_InitTypeDef NVIC_InitStrue;
//时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA,ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1,ENABLE);
//GPIO10使能TX
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_10; //10脚
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_50MHz;//IO口速度为50MHz
GPIO_Init(GPIOB,&GPIO_InitStrue); //根据设定参数初始化GPIOB_10
//GPIO10使能RX
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_11;//11脚
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_50MHz;//IO口速度为50MHz
GPIO_Init(GPIOB,&GPIO_InitStrue); //根据设定参数初始化GPIOB_11
//USART初始化
USART_InitStrue.USART_BaudRate=9600;//波特率9600
USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//无硬件流控制
USART_InitStrue.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;//使能发送、接收
USART_InitStrue.USART_Parity=USART_Parity_No;//无基偶校验
USART_InitStrue.USART_StopBits=USART_StopBits_1;//停止位1位
USART_InitStrue.USART_WordLength=USART_WordLength_8b;//数据8位
USART_Init(USART1,&USART_InitStrue);//根据设定初始化USART1
//USART1使能
USART_Cmd(USART1,ENABLE);
//开中断
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//开中断USART1
NVIC_InitStrue.NVIC_IRQChannel=USART1_IRQn;//通道
NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE;//使能
NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1;//抢占优先级
NVIC_InitStrue.NVIC_IRQChannelSubPriority=1;//子优先级
NVIC_Init(&NVIC_InitStrue);
}
中断接受函数
//中断服务函数
void USART1_IRQHandler(void)
{
u8 USART1_in;
if(USART_GetITStatus(USART1,USART_IT_RXNE))
{
USART1_in=USART_ReceiveData(USART1);
USART_SendData(USART1, USART1_in);//向串口3发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
}
}
将使用USART1同步/异步串行通信接口为例,进行介绍。既然想通过USART1通信接口发送数据,那肯定GPIO引脚呀,因此继续在官方手册中查找
废话少说,直接上代码
配置IO引脚、USART、中断向量优先级等参数:
//串口初始化
void USART1_init()
{
GPIO_InitTypeDef GPIO_InitStrue;
USART_InitTypeDef USART_InitStrue;
NVIC_InitTypeDef NVIC_InitStrue;
//时钟使能
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);
RCC_APB1PeriphClockCmd(RCC_APB1Periph_USART1,ENABLE);
//GPIO10使能TX
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_AF_PP;//复用推挽输出
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_10; //10脚
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_50MHz;//IO口速度为50MHz
GPIO_Init(GPIOB,&GPIO_InitStrue); //根据设定参数初始化GPIOB_10
//GPIO10使能RX
GPIO_InitStrue.GPIO_Mode=GPIO_Mode_IN_FLOATING;//浮空输入
GPIO_InitStrue.GPIO_Pin=GPIO_Pin_11;//11脚
GPIO_InitStrue.GPIO_Speed=GPIO_Speed_50MHz;//IO口速度为50MHz
GPIO_Init(GPIOB,&GPIO_InitStrue); //根据设定参数初始化GPIOB_11
//USART初始化
USART_InitStrue.USART_BaudRate=9600;//波特率9600
USART_InitStrue.USART_HardwareFlowControl=USART_HardwareFlowControl_None;//无硬件流控制
USART_InitStrue.USART_Mode=USART_Mode_Rx|USART_Mode_Tx;//使能发送、接收
USART_InitStrue.USART_Parity=USART_Parity_No;//无基偶校验
USART_InitStrue.USART_StopBits=USART_StopBits_1;//停止位1位
USART_InitStrue.USART_WordLength=USART_WordLength_8b;//数据8位
USART_Init(USART1,&USART_InitStrue);//根据设定初始化USART1
//USART1使能
USART_Cmd(USART1,ENABLE);
//开中断
USART_ITConfig(USART1,USART_IT_RXNE,ENABLE);//开中断USART1
NVIC_InitStrue.NVIC_IRQChannel=USART1_IRQn;//通道
NVIC_InitStrue.NVIC_IRQChannelCmd=ENABLE;//使能
NVIC_InitStrue.NVIC_IRQChannelPreemptionPriority=1;//抢占优先级
NVIC_InitStrue.NVIC_IRQChannelSubPriority=1;//子优先级
NVIC_Init(&NVIC_InitStrue);
}
中断接受函数
//中断服务函数
void USART1_IRQHandler(void)
{
u8 USART1_in;
if(USART_GetITStatus(USART1,USART_IT_RXNE))
{
USART1_in=USART_ReceiveData(USART1);
USART_SendData(USART1, USART1_in);//向串口3发送数据
while(USART_GetFlagStatus(USART1,USART_FLAG_TC)!=SET);//等待发送结束
}
}
stm32 usart 异步传输示例的更多相关文章
- [stm32] USART USART1收发功能工程
>_<!功能:PC端发送一个特定的字符:0x0d 0x0a,单片机则返回一句话,如图: >_<!知识: 1.复用功能I/O和调试配置(AFIO) 为了优化外设数目,可以把一些 ...
- 单片机stm32 USART串口实际应用解析
stm32作为现在嵌入式物联网单片机行业中经常要用多的技术,相信大家都有所接触,今天这篇就给大家详细的分析下有关于stm32的出口,还不是很清楚的朋友要注意看看了哦,在最后还会为大家分享有些关于stm ...
- stm32 USART rs485 rs232
转载自:http://www.cnblogs.com/chineseboy/archive/2013/03/06/2947173.html 前题: 前段时间,在公司调试了一个项目,很简单,但对于初学的 ...
- STM32 USART 波特率计算
The baud rate for the receiver and transmitter (Rx and Tx) are both set to the same value as program ...
- stm32 usart的几种通信模式
一 USART 通用同步异步收发器(USART)提供了一种灵活的方法与使用工业标准NRZ异步串行数据格式的外部设备之间进行全双工数据交换. USART支持同步单向通信和半双工单线通信,也支持LIN(局 ...
- STM32 ~ USART接收不定长数据
IDLE中断什么时候发生? IDLE就是串口收到一帧数据后,发生的中断.什么是一帧数据呢?比如说给单片机一次发来1个字节,或者一次发来8个字节,这些一次发来的数据,就称为一帧数据,也可以叫做一包数据. ...
- stm32 USART使用标志
在USART的发送端有2个寄存器,一个是程序可以看到的USART_DR寄存器,另一个是程序看不到的移位寄存器,对应USART数据发送有两个标志,一个是TXE=发送数据寄存器空,另一个是TC=发送结束. ...
- stm32 usart 串口
比特率是每秒钟传输二进制代码的位数,单位是:位/秒(bps).如每秒钟传送240个字符, 而每个字符格式包含10位(1个起始位.1个停止位.8个数据位),这时的比特率为: 10位 × 240个/秒 = ...
- [stm32] NRF24L01+USART搞定有线和无线通信
前言 一般进行远程监控时,2.4G无线通信是充当远程数据传输的一种方法.这时就需要在现场部分具备无线数据发送装置,而在上位机部分由于一般只有串口,所以将采集到的数据送到电脑里又要在上位机端设计一个数据 ...
随机推荐
- 关于GC和析构函数的一个趣题
这个有趣的问题感谢装配脑袋友情提供. 请看如下代码: public class Dummy { public static Dummy Instance; ; ~Dummy() { Instance ...
- Ubuntu 14 安装 .Net Core
.Net Core的安装包的分发地址如下: https://apt-mo.trafficmanager.net/repos/dotnet-release/pool/main/d/ 方法一: 可以分别手 ...
- Hadoop HDFS 用户指南
This document is a starting point for users working with Hadoop Distributed File System (HDFS) eithe ...
- 页面静态化技术Freemarker技术的介绍及使用实例.
一.FreeMarker简介 1.动态网页和静态网页差异 在进入主题之前我先介绍一下什么是动态网页,动态网页是指跟静态网页相对应的一种网页编程技术.静态网页,随着HTML代码的生成,页面的内容和显示效 ...
- Swift语言快速入门
Swift语言快速入门(首部同步新版官方API文档和语法的Swift图书,确保代码可编译,作者专家在线答疑,图书勘误实时跟进) 极客学院 编著 ISBN 978-7-121-24328-8 201 ...
- 动态加载JS 和 CSS
<script type="text/javascript"> $(function () { var filename = '/assets/css/main.css ...
- 了解screen对象的常用视图属性
前面的话 screen对象基本上只用来表明客户端的能力,其中包括浏览器窗口外部的显示器的信息,如像素高度和宽度等.每个浏览器中的screen对象都包含着各不相同的属性.本文将详细介绍screen对象的 ...
- Android之startService()和bindService()区别
1. 生命周期: startService()方式启动,Service是通过接受Intent并且会经历onCreate()和onStart().当用户在发出意图使之销毁时会经历onDestroy(), ...
- c++ stringstream(老好用了)
前言: 以前没有接触过stringstream这个类的时候,常用的字符串和数字转换函数就是sscanf和sprintf函数.开始的时候就觉得这两个函数应经很叼了,但是毕竟是属于c的.c++中引入了流的 ...
- Neutron Vlan Network 原理- 每天5分钟玩转 OpenStack(92)
前面我们陆续学习了 Neutron local network,flat network 和 DHCP 服务,从本节将开始讨论 vlan network. vlan network 是带 tag 的网 ...