SAM4E单片机之旅——8、UART初步
通信还是比让LED灯闪烁实用得多的。
这次试试使用UART,实现开发版和PC间的通信。功能比较简单,就是把PC发向开发版的内容发送回去。这次主要介绍一下UART的配置,至于通信,则使用较为简单的不断查询UART状态寄存器的循环实现。
一、 准备工作
UART作为异步串口通信协议的一种,所以必须先要准备一根串口线。用串口线将PC的串口和开发板的DBGU口连起来。
同时,在PC上需要准备好串口通信软件。
二、 电路
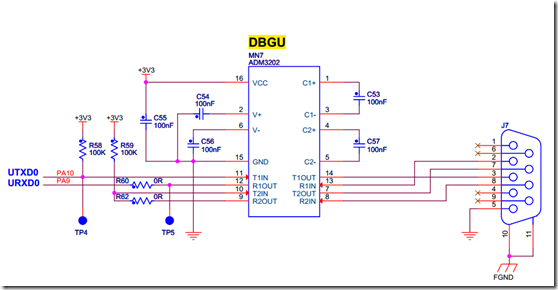
DBGU有两个引脚分别与PA10和PA9相连,这两个复用引脚的外设A即为UART0。
三、 PIO配置
需将PA9和PA10引脚两个引脚复用为外设A引脚。
四、 UART测试
为测试线缆的连接、串口通信软件是否正确,可以先使用UART的测试模式。在使用“自动回应模式”或者“远程回环模式”时,接收引脚均会和发送引脚相连,即发送端会接收到发送的数据。
以下为在UART_MR中选择“远程回环模式”时的代码:
UART0->UART_MR = UART_MR_CHMODE_REMOTE_LOOPBACK;
若PIO配置、线缆连接、PC端软件均无问题,则现在在PC端即可接收到原本发送的数据了。测试成功后注意删除相关的测试代码。
五、 UART配置
PMC时启用UART时钟
PMC->PMC_PCER0 = (1 << ID_UART0);
- 波特率设置
波特率的计算方法为:MCK / ( CD * 16 ),其中CD在UART_BRGR中设置。
因为CD必须为整数,所以能使用的波特率的值就较为有限了。同时,我所使用的串口通信软件只支持选择常用的波特率。而在通信过程中,对双方波特率的误差有一定的限制(如芯片手册中提到,不推荐USART在波特率误差超过5%时使用)。所以这更减少了波特率的选择范围。
在使用默认MCK,即4 MHz的情况下,我选择使用一个较为慢速的波特率:19200 Hz。将CD的值设为13,使实际波特率为19230 Hz左右,即误差大概为0.1%。
UART0->UART_BRGR = UART_BRGR_CD( 13 );
- UART控制
需要在UART控制寄存器(UART_CR)中使能接收器及发送器:
UART0->UART_CR = UART_CR_RXEN | UART_CR_TXEN;
- UART数据包格式
本芯片的UART支持的格式仅有:8位数据位、发送时停止位为1位。但我们可以设置校验位,不过为了简单起见,这里不使用校验:
UART0->UART_MR = UART_MR_PAR_NO;
六、 数据收发
通过不断查询状态寄存器的相关字段,以了解收发的状态,然后进行操作即可:
while(1)
{
/* 接收*/
while ((UART0->UART_SR & UART_SR_RXRDY) == 0)
;
data = UART0->UART_RHR; /* 发送*/
while((UART0->UART_SR & UART_SR_TXRDY) == 0)
;
UART0->UART_THR = data;
}
七、 PC端配置
将PC端的串口通信格式设置如下:波特率 19200;数据位 8;停止位 1;校验 无。设置完成后即可通信。
SAM4E单片机之旅——8、UART初步的更多相关文章
- SAM4E单片机之旅——17、通过UART进行标准IO
交互还是很有必要的,而且使用键盘和显示器的交互效率还是很高的.当然,可以直接使用UART进行字符的输入和输出.但是又何必浪费了C的标准输入输出的格式控制之类的功能呢? 这次内容就是使用scanf() ...
- SAM4E单片机之旅——13、LCD之ASF初步
在Atmel Studio 6中,集成了Atmel Software Framework(ASF框架).通过它提供的库,可以很快速地完成新的项目. 这次的最终目标使用ASF在LCD上显示出文字“Hel ...
- SAM4E单片机之旅——11、UART之PDC收发
使用PDC进行数据的收发能减少CPU的开销.这次就使用PDC进行UART数据的接收与发送,同时,也利用TC也实现了PDC的接收超时. PDC是针对外设的DMA控制器.对比DMA控制器,它更为简便,与相 ...
- SAM4E单片机之旅——10、UART与MCK之PLL
为使用更更高的波特率,则需要更更高的外设时钟的频率.这个时候就需要用到锁相环(PLL)了.锁相环可以对输入的时钟进行分频.升频后进行输出.MCK可以使用的锁相环为PLLA,而PLLA的输入时钟为MAI ...
- SAM4E单片机之旅——9、UART与MCK之MAINCK
为得到更高的带宽,需要使用更高的波特率.UART波特率的计算已经介绍过了,现在就尝试下调整外设的时钟频率.可以有多种方法调整外设时钟(MCK)的频率,这里先介绍先主要时钟(MAINCK)的设置,其中包 ...
- SAM4E单片机之旅——18、通过AFEC(ADC)获取输入的电压
很多时候,一个电压不仅仅需要定性(高电平或者低电平),而且要定量(了解具体电压的数值).这个时候就可以用到模数转换器(ADC)了.这次的内容是测量开发板搭载的滑动变阻器(VR1)的电压,然后把ADC转 ...
- SAM4E单片机之旅——24、使用DSP库求向量数量积
DSP(Digital Signal Processing,数字信号处理)中会使用大量的数学运算.Cortex-M4中,配置了一些强大的部件,以提高DSP能力.同时CMSIS提供了一个DSP库,提供了 ...
- SAM4E单片机之旅——23、在AS6(GCC)中使用FPU
浮点单元(Floating Point Unit,FPU),是用于处理浮点数运算的单元. 为使用FPU,除了需要启用FPU外,还需要对编译器进行设置,以使其针对浮点运算生成特殊的指令.虽然在Atmel ...
- SAM4E单片机之旅——19、CAN间通信
CAN协议具有良好的可靠性,在工业中应用广泛.这次就先熟悉CAN的基本功能. 开发板有两个CAN,每个CAN有8个信箱.这次内容是从CAN0的信箱0发送数据到CAN1的信箱0. 除本次使用的功能外,C ...
随机推荐
- 【CF666B】World Tour(贪心,最短路)
题意:给你一张有向图,叫你给出四个点的序列a,b,c,d,使得这四个点依次间的最短路之和最大.(4 ≤ n ≤ 3000, 3 ≤ m ≤ 5000) 思路:O(n4)可用来对拍 我们需要O(n2)级 ...
- Linux 设备驱动的固件加载【转】
转自:http://blog.csdn.net/zqixiao_09/article/details/51106663 版权声明:本文为博主原创文章,未经博主允许不得转载. 作为一个驱动作者, 你可能 ...
- AJAX 是一种在无需重新加载整个网页的情况下,能够更新部分网页的技术。
AJAX = Asynchronous JavaScript and XML(异步的 JavaScript 和 XML). AJAX 不是新的编程语言,而是一种使用现有标准的新方法. AJAX 是与服 ...
- JS-禁止移动端长按页面后弹出“在浏览器打开”这个菜单
阻止浏览器的touchstart事件 document.addEventListener('touchstart', function(e) { e.preventDefault(); ...
- Codechef Black Nodes in Subgraphs(树型背包)
题目链接 Black Nodes in Subgraphs 题目意思就是在一棵树中所有点标记为两种颜色(黑和白) 然后询问是否存在大小为X恰好有Y个黑点的连通块 这题我们可以用树型背包的方法 设$f[ ...
- 树(弱化版)(lca)
3306: 树 时间限制: 10 Sec 内存限制: 256 MB 题目描述 给定一棵大小为 n 的有根点权树,支持以下操作: • 换根 • 修改点权 • 查询子树最小值 输入 第一行 ...
- logging模块详解以及常见代码
1.在django中获取客户端IP地址: if 'HTTP_X_FORWARDED_FOR' in request.META: ip = request.META['HTTP_X_FORWARDED_ ...
- URAL - 1860 Fiborial
Discription Consider a sequence F i that satisfies the following conditions: Find the number of dif ...
- Chelly的串串专题
CF149E 题意:给出一个长度为n的文本串和m个模式串,求有多少个模式串可以拆成两半,使得这两半按顺序匹配(n<=2e5,m<=100) 最暴力的想法就是对于每个询问串,全部和原串做一遍 ...
- 赞一下TMS Software 和 AdvStringGrid
非常久前给Support发Email问能不能在设计期给AdvStringGrid标题加个数字标识.每次我都是自己改代码加上去.这次升级到新版本号,没想到增加了这个功能: 功能虽小可是非常有用,非常多的 ...