学习JUC源码(1)——AQS同步队列(源码分析结合图文理解)
前言
最近结合书籍《Java并发编程艺术》一直在看AQS的源码,发现AQS核心就是:利用内置的FIFO双向队列结构来实现线程排队获取int变量的同步状态,以此奠定了很多并发包中大部分实现基础,比如ReentranLock等。今天又是周末,便来总结下最近看的消化后的内容。
主要参考资料《Java并发编程艺术》(有需要的小伙伴可以找我,我这里只有电子PDF)结合ReentranLock、AQS等源码。
博文中的流程图,结构图等都是我理解之后一步步亲自画的,如果转载,请标明谢谢!
一、同步队列的结构与实现
1、同步队列的结构
(1)结构介绍
AQS使用的同步队列是基于一种CLH锁算法来实现(引用网上资料对CLH简单介绍):
CLH锁也是一种基于链表的可扩展、高性能、公平的自旋锁,申请线程只在本地变量上自旋,它不断轮询前驱的状态,如果发现前驱释放了锁就结束自旋;
结点之间是通过隐形的链表相连,之所以叫隐形的链表是由于这些结点之间没有明显的next指针,而是通过myPred所指向的结点的变化情况来影响myNode的行为;
当一个线程须要获取锁时,会创建一个新的QNode。将当中的locked设置为true表示须要获取锁。然后线程对tail域调用getAndSet方法,使自己成为队列的尾部。同一时候获取一个指向其前趋的引用myPred,然后该线程就在前趋结点的locked字段上旋转。直到前趋结点释放锁。
当一个线程须要释放锁时,将当前结点的locked域设置为false,同一时候回收前趋结点。线程A须要获取锁。其myNode域为true。些时tail指向线程A的结点,然后线程B也增加到线程A后面。tail指向线程B的结点。然后线程A和B都在它的myPred域上旋转,一旦它的myPred结点的locked字段变为false,它就能够获取锁。
而在源码中也有这样的介绍:
/**
* Wait queue node class.
*
* <p>The wait queue is a variant of a "CLH" (Craig, Landin, and
* Hagersten) lock queue. CLH locks are normally used for
* spinlocks.
* ...........
* <p>To enqueue into a CLH lock, you atomically splice it in as new
* tail. To dequeue, you just set the head field.
* <pre>
* +------+ prev +-----+ +-----+
* head | | <---- | | <---- | | tail
* +------+ +-----+ +-----+
* </pre>
* ..............
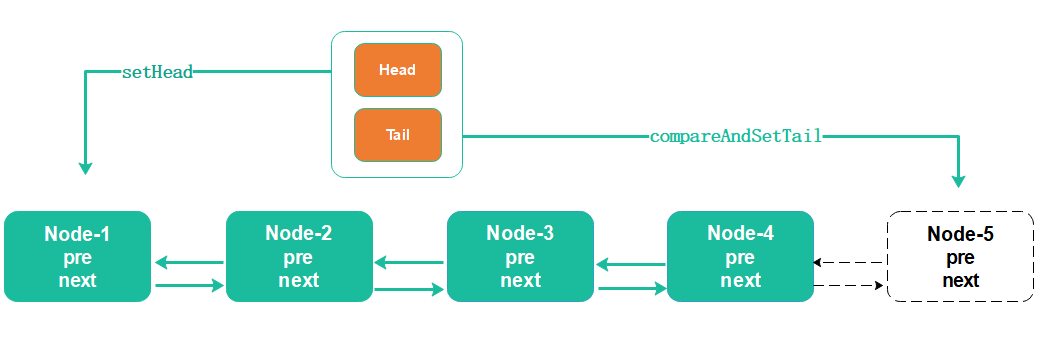
在AQS中的同步队列结构以及获取/释放锁都是基于此实现的,这里我们先放一个我画的基本结构来理解AQS同步队列,再进一步介绍一些细节。

根据以上图我们看到:
- 该队列是双向FIFO队列,每个节点都有pre、next域;
- 同步器包含了两个节点类型的引用,一个指向头结点,一个指向尾节点;
- 新加入线程被构造成Node通过调用compareAndSetTail加入同步队列中;
- 使用setHead(Node node)设置头结点,指向队列头。使用compareAndSetTail(Node exceptNode, Node updateNode)指向队列尾节点。
在源码中我们可以看到:
// 内部类Node节点
static final class Node{...}
// 同步队列的head引用
private transient volatile Node head;
// 同步队列的tail引用
private transient volatile Node tail;
(2)节点构成
那么Node结构的具体构成是什么呢?我们具体看内部类Node的源码:
static final class Node {
/** Marker to indicate a node is waiting in shared mode */
static final Node SHARED = new Node();
/** Marker to indicate a node is waiting in exclusive mode */
static final Node EXCLUSIVE = null;
/** waitStatus value to indicate thread has cancelled */
static final int CANCELLED = 1;
/** waitStatus value to indicate successor's thread needs unparking */
static final int SIGNAL = -1;
/** waitStatus value to indicate thread is waiting on condition */
static final int CONDITION = -2;
/**
* waitStatus value to indicate the next acquireShared should
* unconditionally propagate
*/
static final int PROPAGATE = -3;
/** 等待状态:
* 0 INITAIL: 初始状态
* 1 CANCELLED: 由于等待超时或者被中断,需要从同步队列中取消等待,节点进入该状态不会被改变
* -1 SIGNAL: 当前节点释放同步状态或被取消,则等待状态的后继节点被通知
* -2 CONDITION: 节点在等待队列中,线程在Condition上,需要其它线程调用Condition的signal()方法才能从等待队转移到同步队列
* -3 PROPAGATE: 表示下一个共享式同步状态将会无条件被传播下去
*/
volatile int waitStatus;
/** 前驱结点 */
volatile Node prev;
/** 后继节点 */
volatile Node next;
/** 获取同步状态的线程 */
volatile Thread thread;
/** 等待队列中的后继节点 */
Node nextWaiter;
/** 判断Node是否是共享模式 */
final boolean isShared() {
return nextWaiter == SHARED;
}
/** 返回前驱结点 */
final Node predecessor() throws NullPointerException {
Node p = prev;
if (p == null)
throw new NullPointerException();
else
return p;
}
Node() { // Used to establish initial head or SHARED marker
}
Node(Thread thread, Node mode) { // Used by addWaiter
this.nextWaiter = mode;
this.thread = thread;
}
Node(Thread thread, int waitStatus) { // Used by Condition
this.waitStatus = waitStatus;
this.thread = thread;
}
}
从源码中可以发现:同步队列中的节点Node用来保存获取同步状态失败的线程引用、等待状态以及前驱和后继节点。
节点是构成同步队列的基础,没有成功获取同步状态的线程将成为节点加入该队列的尾部。当一个线程无法获取同步状态时,会被构造成节点并加入同步队列中,通过CAS保证设置尾节点这一步是线程安全的,此时才能认为当前节点(线程)成功加入同步队列与尾节点建立联系。具体的实现逻辑请看下面介绍!
2、同步状态获取与释放
(1)独占式同步状态获取与释放
通过调用同步器acquire(int arg)方法可以获取同步状态,该方法中断不敏感,也就是由于线程获取同步状态失败后进入同步队列中,后序线程对进行中断操作时,线程不会从同步队列中移出
public final void acquire(int arg) {
if (!tryAcquire(arg) &&
acquireQueued(addWaiter(Node.EXCLUSIVE), arg))
selfInterrupt();
}
同步状态获取主要的流程步骤:
1)首先调用自定义同步器实现tryAcquire(int arg)方法,该方法保证线程安全的获取同步状态。
2)如果获取失败则构造同步节点(独占式Node.EXCLUSIVE)并通过addWaiter(Node ndoe)方法将该节点加入到同步队列的尾部,同时enq(node)通过for(;;)循环保证安全设置尾节点。
private Node addWaiter(Node mode) {
// 根据给定模式构造Node
Node node = new Node(Thread.currentThread(), mode);
// Try the fast path of enq; backup to full enq on failure
Node pred = tail; // 尝试在尾部添加
if (pred != null) {
node.prev = pred;
// cas方式保证正确添加尾节点
if (compareAndSetTail(pred, node)) {
pred.next = node;
return node;
}
}
// enq主要是通过for(;;)死循环来确保节点正确添加
// 在for(;;)死循环中,通过cas将节点设置为尾节点时,才返回;否则一直尝试设置
enq(node);
return node;
}
private Node enq(final Node node) {
for (;;) {
Node t = tail;
if (t == null) { // Must initialize 当tail节点为null时,必须初始化构造好 head节点
if (compareAndSetHead(new Node()))
tail = head;
} else { // 否则就通过cas开始添加尾节点
node.prev = t;
if (compareAndSetTail(t, node)) {
t.next = node;
return t;
}
}
}
}
假设原队列中存在Node-1到Node-4节点,此时某个线程获取同步状态失败则构成成Node-5通过CAS方式加入队列(下图忽略自旋环节)。
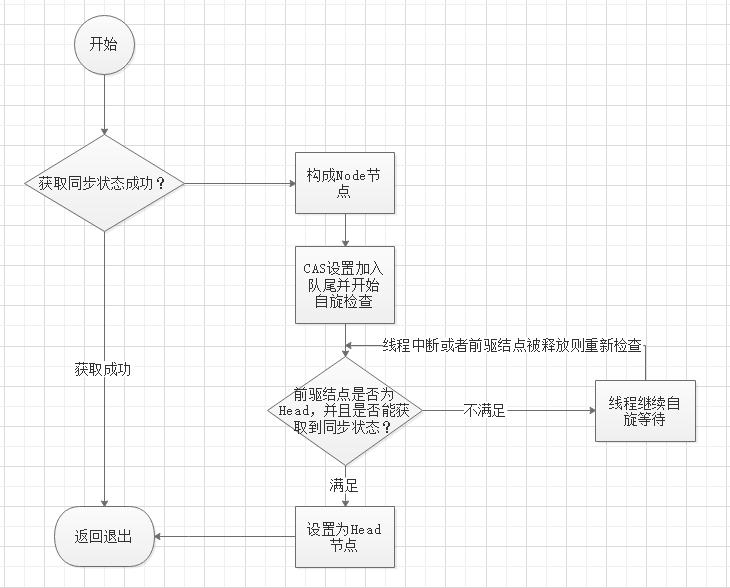
3)节点进入同步队列之后“自旋”,即acquireQueued(final Node node, int arg)方法,在这个方法中,当前node死循环尝试获取锁状态,但是只有node的前驱结点是Head才能尝试获取同步状态,获取成功之后立即设置当前节点为Head,并成功返回。否则就会一直自旋。
final boolean acquireQueued(final Node node, int arg) {
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
// 当前node节点的前驱是Head时(p == head),才能有资格去尝试获取同步状态(tryAcquire(arg))
// 这是因为当前节点的前驱结点获得同步状态,才能唤醒后继节点,即当前节点
if (p == head && tryAcquire(arg)) { // 以上条件满足之后
setHead(node); // 设置当前节点为Head
p.next = null; // help GC // 释放ndoe的前驱节点
failed = false;
return interrupted;
}
// 线程被中断或者前驱结点被释放,则继续进入检查:p == head && tryAcquire(arg
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
此时新加入的Node-5节点也开始自旋,此时的Head(Node-1)已经获取到了同步状态,而Node-2退出了自旋,成为了新的Head。
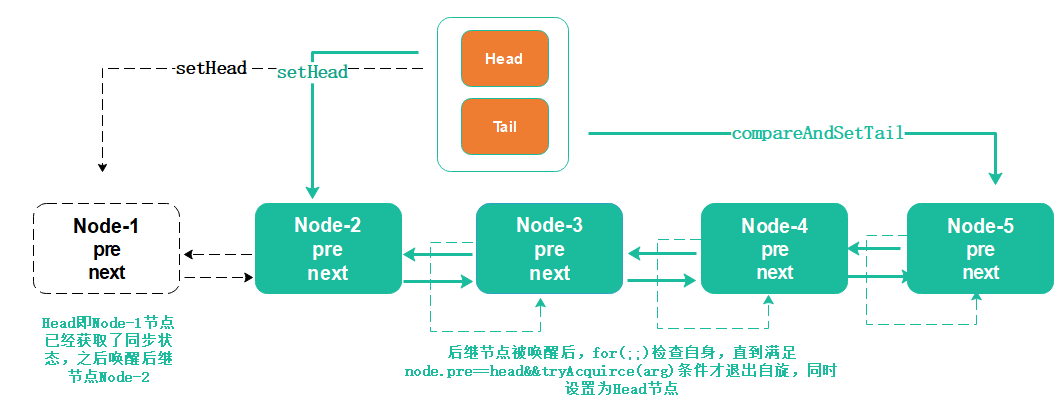
文字总结:
1)同步器会维护一个双向FIFO队列,获取同步失败的线程将会被构造成Node加入队尾(并且做自旋检查:检查前驱结点是否是Head);
2)当前线程想要获得同步状态,前提是其前驱结点是头结点,并且获得了同步状态;
3)当Head调用release(int arg)释放锁的同时会唤醒后继节点(即当前节点),后继节点结束自旋
流程图总结:
同步器的release方法:释放锁的同时,唤醒后继节点(进而时后继节点重新获取同步状态)
public final boolean release(int arg) {
if (tryRelease(arg)) {
Node h = head;
if (h != null && h.waitStatus != 0)
// 该方法会唤醒Head节点的后继节点,使其重试尝试获取同步状态
unparkSuccessor(h);
return true;
}
return false;
}
UnparkSuccessor(Node node)方法使用LookSupport(LockSupport.unpark)唤醒处于等待状态的线程(之后会慢慢看源码介绍)。
(2)共享式同步状态获取与释放
共享锁跟独占式锁最大的不同就是:某一时刻有多个线程同时获取到同步状态,获取判断是否获取同步状态成功的关键,获取到的同步状态要大于等于0。而其他步骤基本都是一致的,还是从源码开始分析起:带后缀Share都为共享式同步方法。
1)acquireShared(int arg)获取同步状态:如果获取失败则加入队尾,并且检查是否具备退出自旋的条件(前驱结点是头结点并且能成功获取同步状态)
public final void acquireShared(int arg) {
// tryAcquireShared 获取同步状态,大于0才是获取状态成功,否则就是失败
if (tryAcquireShared(arg) < 0)
// 获取状态失败则构造共享Node,加入队列;
// 并且检查是否具备退出自旋的条件:即preNode为head,并且能获取到同步状态
doAcquireShared(arg);
}
2)doAcquireShared(arg):获取失败的Node加入队列,如果当前节点的前驱结点是头结点的话,尝试获取同步状态,如果大于等于0则在for(;;)中退出(退出自旋)。
private void doAcquireShared(int arg) {
// 构造共享模式的Node
final Node node = addWaiter(Node.SHARED);
boolean failed = true;
try {
boolean interrupted = false;
for (;;) {
final Node p = node.predecessor();
if (p == head) {
int r = tryAcquireShared(arg);
// 前驱节点是头结点,并且能获取状态成功,则return返回,退出死循环(自旋)
if (r >= 0) {
setHeadAndPropagate(node, r);
p.next = null; // help GC
if (interrupted)
selfInterrupt();
failed = false;
return;
}
}
if (shouldParkAfterFailedAcquire(p, node) &&
parkAndCheckInterrupt())
interrupted = true;
}
} finally {
if (failed)
cancelAcquire(node);
}
}
3)releaseShared(int arg):释放同步状态,通过loop+CAS方式释放多个线程的同步状态。
public final boolean releaseShared(int arg) {
if (tryReleaseShared(arg)) {
// 通过loop+CAS方式释放多个线程的同步状态
doReleaseShared();
return true;
}
return false;
}
二、自定义同步组件(实现Lock,内部类Sync继承AQS)
1、实现一个不可重入的互斥锁Mutex
2、实现指定共享数量的共享锁MyShareLock
--------------未完待续(为了加深理解画图写代码花费时间较长,所以慢慢来保证质量,不着急!)-------------
------------------2020.12.08已补充,学习JUC源码(2)——自定义同步组件----------------------
学习JUC源码(1)——AQS同步队列(源码分析结合图文理解)的更多相关文章
- 学习JUC源码(3)——Condition等待队列(源码分析结合图文理解)
前言 在Java多线程中的wait/notify通信模式结尾就已经介绍过,Java线程之间有两种种等待/通知模式,在那篇博文中是利用Object监视器的方法(wait(),notify().notif ...
- JUC并发编程基石AQS之主流程源码解析
前言 由于AQS的源码太过凝练,而且有很多分支比如取消排队.等待条件等,如果把所有的分支在一篇文章的写完可能会看懵,所以这篇文章主要是从正常流程先走一遍,重点不在取消排队等分支,之后会专门写一篇取消排 ...
- 学习JUC源码(2)——自定义同步组件
前言 在之前的博文(学习JUC源码(1)--AQS同步队列(源码分析结合图文理解))中,已经介绍了AQS同步队列的相关原理与概念,这里为了再加深理解ReentranLock等源码,模仿构造同步组件的基 ...
- Java并发包源码学习系列:详解Condition条件队列、signal和await
目录 Condition接口 AQS条件变量的支持之ConditionObject内部类 回顾AQS中的Node void await() 添加到条件队列 Node addConditionWaite ...
- AQS独占式同步队列入队与出队
入队 Node AQS同步队列和等待队列共用同一种节点结构Node,与同步队列相关的属性如下. prev 前驱结点 next 后继节点 thread 入队的线程 入队节点的状态 INITIAl 0 初 ...
- AbstractQueuedSynchronizer同步队列与Condition等待队列协同机制
概要: AQS维护了一个同步队列 Condition是JUC的一个接口,AQS的ConditionObject实现了这个接口,维护了一个等待队列(等待signal信号的队列) 线程调用reentran ...
- Java并发包源码学习系列:CLH同步队列及同步资源获取与释放
目录 本篇学习目标 CLH队列的结构 资源获取 入队Node addWaiter(Node mode) 不断尝试Node enq(final Node node) boolean acquireQue ...
- [Java并发] AQS抽象队列同步器源码解析--锁获取过程
要深入了解java并发知识,AbstractQueuedSynchronizer(AQS)是必须要拿出来深入学习的,AQS可以说是贯穿了整个JUC并发包,例如ReentrantLock,CountDo ...
- JUC锁:核心类AQS源码详解
目录 1 疑点todo和解疑 2 AbstractQueuedSynchronizer学习总结 2.1 AQS要点总结 2.2 细节分析 2.2.1 插入节点时先更新prev再更新前驱next 2.2 ...
随机推荐
- 手机运行Linux系统,可以办公,可以上网,太爽了!
之前用 Termux 编程一直都是在黑乎乎的命令行敲代码,有多少人知道其实可以在手机上用 Termux 构建一个包含桌面环境的 Linux 系统呢. 这个构建出的 linux 系统,可以显示出桌面,可 ...
- pthread 多线程基础
本文主要介绍如何通过 pthread 库进行多线程编程,并通过以下例子进行说明. 基于莱布尼兹级数计算 \(\pi\) . 多线程归并排序 参考文章: [1] https://computing.ll ...
- tcp syn-synack-ack 服务端发送syn-ack
tcp_v4_send_synack()用于发送SYNACK段,在tcp_v4_conn_request()中被调用. 首先调用tcp_make_synack()构造SYNACK段,主要是构造TCP报 ...
- 用seaborn绘制散点图
散点图可以显示观察数据的分布,描述数据的相关性,matlibplot也可以绘制散点图,不过我一般优先使用seaborn库的sctterplot()绘制,下面就介绍一下如何用seaborn.scatte ...
- python实战GUI界面+mysql
前言 前面用tkinter做了一个巨丑的GUI界面,今天想把它变漂亮起来,重新找回page做了一个界面,它也是基于tkinter开发的所见即所得的界面编辑器,前面因为代码搞不明白没用上,现在重新研究一 ...
- 编译的Ceph二进制文件过大问题
前言 在ceph的研发群里看到一个cepher提出一个问题,编译的ceph的二进制文件过大,因为我一直用的打包好的rpm包,没有关注这个问题,重新编译了一遍发现确实有这个问题 本篇就是记录如何解决这个 ...
- Ubuntu12.10 设置默认命令行启动
在虚拟机当中安装ubuntu12.10的时候默认把图形界面给装上了,由于不需要使用桌面,所以为了省去每次进入到图形界面然后再用ctrl+F1的方式切换到命令行的步骤,希望能够默认进入的是命令行模式,那 ...
- Go语言配置管理神器——Viper中文教程
Viper是适用于Go应用程序的完整配置解决方案.它被设计用于在应用程序中工作,并且可以处理所有类型的配置需求和格式. Viper Viper是适用于Go应用程序的完整配置解决方案.它被设计用于在应用 ...
- Elasticsearch 国内镜像下载站
镜像地址:https://thans.cn/mirror/elasticsearch.html 支持 5.0.0~7.3.1 各个平台的各个版本. 本文章转载他人.
- 小而精的 Docker 项目,为什么要使用 Docker? Docker 容器
前言 为什么要使用 Docker? Docker 容器的启动在秒级 Docker 对系统资源利用率高,一台主机上可以同时运行数千个 Docker 容器. Docker 基本不消耗系统资源,使得运行在 ...