opencv实现坐标旋转(教你框住小姐姐)
一、项目背景
最近在做一个人脸检测项目,需要接入百度AI的系统进行识别和检测。主要流程就是往指定的URL上post图片上去,之后接收检测结果就好了。
百度的检测结果包含这样的信息:
left - 人脸区域离左边界的距离
top - 人脸区域离上边界的距离
width - 人脸区域的宽度
height - 人脸区域的高度
ratation 人脸框相对于竖直方向的顺时针旋转角[-180, 180].
如果我想把人脸框出来,很容易想到的是以(left, top)为左上顶点,以width 为宽,height为高,画一个矩形就好了。但其实这样是不合理的,如果人头是倒着的,这样画出来是不合理的。就像下面这样:
所以必须考虑把旋转角加上去。于是我想的策略是先把框画出来,再逆时针旋转ratation 就可以了。
二、如何旋转
大致策略就是:先算出四个点的左标,再以左上角的点为原点,逆时针旋转ratation 就ok了。四个点的左标比较容易确定,利用起点左标加宽高就能算出来。
这里主要讲解如何算旋转后的左标,如下图:
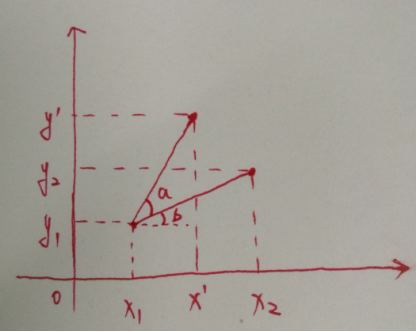
已知x1,x2,y1,y2和∠a,求x’,和y’。这时候就需要用到高中的三角函数的知识了。
假设,(x1, y1) 到 (x2, y2)的长度为r,再画一个∠b。
x’ = x1 + r * cos(a + b);
x’ = x1 + r * cos(a) * cos(b) - r * sin(a) * sin(b);
又因为:
r * cos(b) = x2 - x1;
r * sin(b) = (y2 - y1);
最终可以求出:
x’ = x1 + cos(a) * (x2 - x1) - sin(a) * (y2 - y1);
同理求出:
y’ = y1 + sin(a) * (x2 - x1) - cos(a) * (y2 - y1);
啊,这真是用了我毕生所学的数学知识,真没想到工作后还会用到三角函数的知识。还是要多学点数学知识才好啊。
三、源码
下面就是真正画图的东西了,为了测试这个公式是否可行,我用opencv画了一个四根线(其实就是一个方形),然后以左上角为顶点旋转。
下面的具体的代码,比较简单,主要是那个公式,所以也没什么注释。需要包含opencv头文件,以及链接opencv的库。
/*
* @author:xcywt
* @date:2018-08-10
* @contact me: https://www.cnblogs.com/xcywt/
*/
#include<iostream>
#include "opencv2/highgui/highgui.hpp" using namespace cv;
#define PI 3.14159265 #define ROTATE_COUNT 180
int RotateTest2()
{
if (ROTATE_COUNT > )
{
return -;
}
int x1 = , y1 = ;
int x2 = , y2 = ;
int x3 = , y3 = ;
int x4 = , y4 = ; int arrX1[ROTATE_COUNT], arrY1[ROTATE_COUNT];
int arrX2[ROTATE_COUNT], arrY2[ROTATE_COUNT];
int arrX3[ROTATE_COUNT], arrY3[ROTATE_COUNT];
int arrX4[ROTATE_COUNT], arrY4[ROTATE_COUNT]; int nAgree = ;
for (int i = ; i < ROTATE_COUNT; i++)
{
nAgree = i * ( / ROTATE_COUNT);
double dRot = nAgree * PI / ;
double dSinRot = sin(dRot), dCosRot = cos(dRot); arrX1[i] = x1;
arrY1[i] = y1; arrX2[i] = x1 + dCosRot * (x2 - x1) - dSinRot * (y2 - y1);
arrY2[i] = y1 + dSinRot * (x2 - x1) + dCosRot * (y2 - y1); arrX3[i] = x1 + dCosRot * (x3 - x1) - dSinRot * (y3 - y1);
arrY3[i] = y1 + dSinRot * (x3 - x1) + dCosRot * (y3 - y1); arrX4[i] = x1 + dCosRot * (x4 - x1) - dSinRot * (y4 - y1);
arrY4[i] = y1 + dSinRot * (x4 - x1) + dCosRot * (y4 - y1);
} Mat im(, , CV_8UC3);
line(im, Point(x1, y1), Point(x2, y2), Scalar(, , ), );
line(im, Point(x1, y1), Point(x4, y4), Scalar(, , ), );
line(im, Point(x3, y3), Point(x2, y2), Scalar(, , ), );
line(im, Point(x4, y4), Point(x3, y3), Scalar(, , ), ); for (int i = ; i < ROTATE_COUNT; i++)
{
line(im, Point(arrX1[i], arrY1[i]), Point(arrX2[i], arrY2[i]), Scalar(, , ), );
line(im, Point(arrX1[i], arrY1[i]), Point(arrX4[i], arrY4[i]), Scalar(, , ), );
line(im, Point(arrX3[i], arrY3[i]), Point(arrX2[i], arrY2[i]), Scalar(, , ), );
line(im, Point(arrX4[i], arrY4[i]), Point(arrX3[i], arrY3[i]), Scalar(, , ), );
}
imshow("Is ok", im);
cvWaitKey(); return ;
} int RotateTest()
{
int nAgree = ;
double dRot = nAgree * PI / ;
double dSinRot = sin(dRot), dCosRot = cos(dRot); int x1 = , y1 = ;
int x2 = , y2 = ;
int x3 = , y3 = ;
int x4 = , y4 = ; int x1_1 = x1, y1_1 = y1;
int x2_1 = x1 + dCosRot * (x2 - x1) - dSinRot * (y2 - y1), y2_1 = y1 + dSinRot * (x2 - x1) + dCosRot * (y2 - y1);
int x3_1 = x1 + dCosRot * (x3 - x1) - dSinRot * (y3 - y1), y3_1 = y1 + dSinRot * (x3 - x1) + dCosRot * (y3 - y1);
int x4_1 = x1 + dCosRot * (x4 - x1) - dSinRot * (y4 - y1), y4_1 = y1 + dSinRot * (x4 - x1) + dCosRot * (y4 - y1); std::cout << "P1:(" << x1 << " , " << y1 << ") --> (" << x1_1 << ", " << y1_1 << ")" << std::endl;
std::cout << "P2:(" << x2 << " , " << y2 << ") --> (" << x2_1 << ", " << y2_1 << ")" << std::endl;
std::cout << "P3:(" << x3 << " , " << y3 << ") --> (" << x3_1 << ", " << y3_1 << ")" << std::endl;
std::cout << "P4:(" << x4 << " , " << y4 << ") --> (" << x4_1 << ", " << y4_1 << ")" << std::endl; Mat im(, , CV_8UC3);
line(im, Point(x1, y1), Point(x2, y2), Scalar(, , ), );
line(im, Point(x1, y1), Point(x4, y4), Scalar(, , ), );
line(im, Point(x3, y3), Point(x2, y2), Scalar(, , ), );
line(im, Point(x4, y4), Point(x3, y3), Scalar(, , ), ); line(im, Point(x1_1, y1_1), Point(x2_1, y2_1), Scalar(, , ), );
line(im, Point(x1_1, y1_1), Point(x4_1, y4_1), Scalar(, , ), );
line(im, Point(x3_1, y3_1), Point(x2_1, y2_1), Scalar(, , ), );
line(im, Point(x4_1, y4_1), Point(x3_1, y3_1), Scalar(, , ), ); imshow("Is ok", im);
cvWaitKey();
return ; } int main()
{
//RotateTest();
RotateTest2();
return ;
}
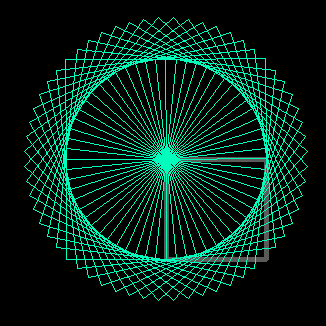
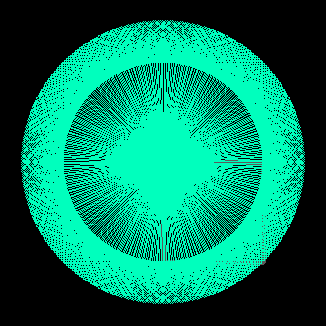
其中RotateTest2()实现了在一个Mat上,画出了旋转各个角度的样子,具体把360分成 ROTATE_COUNT这么多份。可以看到效果还是很好看的。
ROTATE_COUNT为10时:

ROTATE_COUNT为60时:
ROTATE_COUNT为180时:
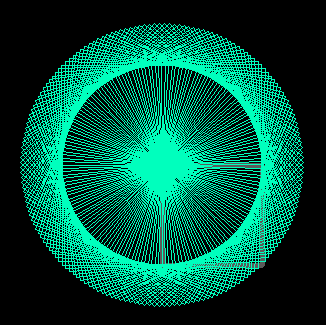
ROTATE_COUNT为360时:
旋转之后的神仙姐姐就框的比较准确了。这样就能正确的框住小姐姐了。

四、总结
数学还是很有用的。人工智能、深度学习还是需要具备数学知识的。
opencv实现坐标旋转(教你框住小姐姐)的更多相关文章
- HDU4456-Crowd (坐标旋转处理+hash处理+二维树状数组)
题意: 给出一个矩阵,初始每个位置上的值都为0,然后有两种操作 一种是更改某个位置上的值 另一种是求某个位置附近曼哈顿距离不大于K的所有位置的值的总和 技巧: 坐标旋转,使得操作之后菱形变成方方正正的 ...
- HDU 1700 Points on Cycle (坐标旋转)
题目链接:HDU 1700 Problem Description There is a cycle with its center on the origin. Now give you a poi ...
- 【30分钟学完】canvas动画|游戏基础(6):坐标旋转探究
前言 本篇主要讲坐标旋转及其应用,这是编程动画必不可少的技术. 阅读本篇前请先打好前面的基础. 本人能力有限,欢迎牛人共同讨论,批评指正. 坐标旋转 模拟场景:已知一个中心点(centerX,cent ...
- 刷抖音太累,教你用Python把高颜值的小姐姐都爬下来慢慢看
前言 文的文字及图片来源于网络,仅供学习.交流使用,不具有任何商业用途,版权归原作者所有,如有问题请及时联系我们以作处理. 作者: 星安果.AirPython 目 标 场 景 相信大家平时刷抖音短视频 ...
- python+opencv抠图并旋转(根据坐标抠图)
import cv2 import numpy as np def subimage(image, center, theta, width, height): theta *= np.pi / 18 ...
- hdu 1700 Points on Cycle(坐标旋转)
http://acm.hdu.edu.cn/showproblem.php?pid=1700 Points on Cycle Time Limit: 1000/1000 MS (Java/Others ...
- opencv图像的旋转
#include"stdafx.h"#include"opencv2/opencv.hpp" using namespace cv;// clockwise 为 ...
- eigen 四元数进行坐标旋转
(<视觉SLAM十四讲>第三讲习题7)设有小萝卜一号和二号在世界坐标系中.一号位姿q1 = [0.35, 0.2, 0.3, 0.1],t1=[0.3, 0.1, 0.1].二号位姿q2= ...
- UVA 11178 Morley's Theorem (坐标旋转)
题目链接:UVA 11178 Description Input Output Sample Input Sample Output Solution 题意 \(Morley's\ theorem\) ...
随机推荐
- 「SCOI2016」围棋 解题报告
「SCOI2016」围棋 打CF后困不拉基的,搞了一上午... 考虑直接状压棋子,然后发现会t 考虑我们需要上一行的状态本质上是某个位置为末尾是否可以匹配第一行的串 于是状态可以\(2^m\)压住了, ...
- [bzoj1717][Milk Patterns 产奶的模式]
题目链接 思路 先求出后缀数组,并且求出LCP.二分一下长度len.check的时候就是看有没有连续的k个后缀的LCP大于len.也就是判断是不是有连续的k-1个height大于len. 代码 #in ...
- fopen() 返回 NULL, 奇葩原因:当前进程打开多个句柄,忘记关闭。(bug)
今天在测试一个程序的时候,突然第一次弹出错误对话框,提示: 创建新文件失败. fopen() 返回 NULL 我又重启程序测试,还是提示同样的错误. 经过几分钟的检查,发现一个规律:当处理到500多个 ...
- 在Java中调用与系统有关的剪切板Clipboard
java从1.5版开始已经能与系统的剪切板很好的交互了. 如果可以在程序中直接调用系统的剪切板来保存“复制”的对象内容,那可以说的比之前的想法好很多. 下面是一个对java.io.File对象进行co ...
- Nginx快捷启动配置
Linux下Nginx开关服务,正常方式是这样({nginx}-为Nginx安装路径): {nginx}/sbin/nginx #启动 {nginx}/sbin/nginx -s stop #停止 这 ...
- 为什么 管理工具里没有Internet(IIS)管理器选项
如上图,localhost页能打开了,但是管理工具里没有iis管理器,主要原因是安装iis时候没有选择web管理工具,选取安装上就 有了
- 使用bcftools提取指定样本的vcf文件(extract specified samples in vcf format)
1.下载安装bcftools. 2.准备样本ID文件,这里命名为samplelistname.txt,一个样本一行,如下所示: sample1 sample2 sample3 3.输入命令: bcft ...
- C++ template一些体悟(3)
其实没啥体悟,因为还没有感受到这些例子的作用,记一下先 #include <iostream> using namespace std; class alloc { }; template ...
- 类图uml
画类图或时序的软件类图astah-community-6_9_0-b4c6e9-jre-setup 先写总体架构再写流程图 即先写类图再流程图 b ^ | a a继承b 工具类是us ...
- day-01(html)
本文档并非个人所写,只是方便自己参考: 案例1-网站信息展示需求: 在页面展示一些文字信息,需要排版技术分析: html:超文本标签语言////////////////////html: 作用:展示 ...