opencv实现坐标旋转(教你框住小姐姐)
一、项目背景
最近在做一个人脸检测项目,需要接入百度AI的系统进行识别和检测。主要流程就是往指定的URL上post图片上去,之后接收检测结果就好了。
百度的检测结果包含这样的信息:
left - 人脸区域离左边界的距离
top - 人脸区域离上边界的距离
width - 人脸区域的宽度
height - 人脸区域的高度
ratation 人脸框相对于竖直方向的顺时针旋转角[-180, 180].
如果我想把人脸框出来,很容易想到的是以(left, top)为左上顶点,以width 为宽,height为高,画一个矩形就好了。但其实这样是不合理的,如果人头是倒着的,这样画出来是不合理的。就像下面这样:
所以必须考虑把旋转角加上去。于是我想的策略是先把框画出来,再逆时针旋转ratation 就可以了。
二、如何旋转
大致策略就是:先算出四个点的左标,再以左上角的点为原点,逆时针旋转ratation 就ok了。四个点的左标比较容易确定,利用起点左标加宽高就能算出来。
这里主要讲解如何算旋转后的左标,如下图:
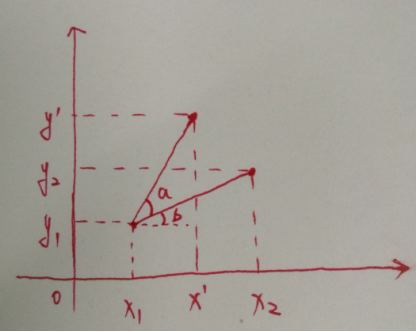
已知x1,x2,y1,y2和∠a,求x’,和y’。这时候就需要用到高中的三角函数的知识了。
假设,(x1, y1) 到 (x2, y2)的长度为r,再画一个∠b。
x’ = x1 + r * cos(a + b);
x’ = x1 + r * cos(a) * cos(b) - r * sin(a) * sin(b);
又因为:
r * cos(b) = x2 - x1;
r * sin(b) = (y2 - y1);
最终可以求出:
x’ = x1 + cos(a) * (x2 - x1) - sin(a) * (y2 - y1);
同理求出:
y’ = y1 + sin(a) * (x2 - x1) - cos(a) * (y2 - y1);
啊,这真是用了我毕生所学的数学知识,真没想到工作后还会用到三角函数的知识。还是要多学点数学知识才好啊。
三、源码
下面就是真正画图的东西了,为了测试这个公式是否可行,我用opencv画了一个四根线(其实就是一个方形),然后以左上角为顶点旋转。
下面的具体的代码,比较简单,主要是那个公式,所以也没什么注释。需要包含opencv头文件,以及链接opencv的库。
/*
* @author:xcywt
* @date:2018-08-10
* @contact me: https://www.cnblogs.com/xcywt/
*/
#include<iostream>
#include "opencv2/highgui/highgui.hpp" using namespace cv;
#define PI 3.14159265 #define ROTATE_COUNT 180
int RotateTest2()
{
if (ROTATE_COUNT > )
{
return -;
}
int x1 = , y1 = ;
int x2 = , y2 = ;
int x3 = , y3 = ;
int x4 = , y4 = ; int arrX1[ROTATE_COUNT], arrY1[ROTATE_COUNT];
int arrX2[ROTATE_COUNT], arrY2[ROTATE_COUNT];
int arrX3[ROTATE_COUNT], arrY3[ROTATE_COUNT];
int arrX4[ROTATE_COUNT], arrY4[ROTATE_COUNT]; int nAgree = ;
for (int i = ; i < ROTATE_COUNT; i++)
{
nAgree = i * ( / ROTATE_COUNT);
double dRot = nAgree * PI / ;
double dSinRot = sin(dRot), dCosRot = cos(dRot); arrX1[i] = x1;
arrY1[i] = y1; arrX2[i] = x1 + dCosRot * (x2 - x1) - dSinRot * (y2 - y1);
arrY2[i] = y1 + dSinRot * (x2 - x1) + dCosRot * (y2 - y1); arrX3[i] = x1 + dCosRot * (x3 - x1) - dSinRot * (y3 - y1);
arrY3[i] = y1 + dSinRot * (x3 - x1) + dCosRot * (y3 - y1); arrX4[i] = x1 + dCosRot * (x4 - x1) - dSinRot * (y4 - y1);
arrY4[i] = y1 + dSinRot * (x4 - x1) + dCosRot * (y4 - y1);
} Mat im(, , CV_8UC3);
line(im, Point(x1, y1), Point(x2, y2), Scalar(, , ), );
line(im, Point(x1, y1), Point(x4, y4), Scalar(, , ), );
line(im, Point(x3, y3), Point(x2, y2), Scalar(, , ), );
line(im, Point(x4, y4), Point(x3, y3), Scalar(, , ), ); for (int i = ; i < ROTATE_COUNT; i++)
{
line(im, Point(arrX1[i], arrY1[i]), Point(arrX2[i], arrY2[i]), Scalar(, , ), );
line(im, Point(arrX1[i], arrY1[i]), Point(arrX4[i], arrY4[i]), Scalar(, , ), );
line(im, Point(arrX3[i], arrY3[i]), Point(arrX2[i], arrY2[i]), Scalar(, , ), );
line(im, Point(arrX4[i], arrY4[i]), Point(arrX3[i], arrY3[i]), Scalar(, , ), );
}
imshow("Is ok", im);
cvWaitKey(); return ;
} int RotateTest()
{
int nAgree = ;
double dRot = nAgree * PI / ;
double dSinRot = sin(dRot), dCosRot = cos(dRot); int x1 = , y1 = ;
int x2 = , y2 = ;
int x3 = , y3 = ;
int x4 = , y4 = ; int x1_1 = x1, y1_1 = y1;
int x2_1 = x1 + dCosRot * (x2 - x1) - dSinRot * (y2 - y1), y2_1 = y1 + dSinRot * (x2 - x1) + dCosRot * (y2 - y1);
int x3_1 = x1 + dCosRot * (x3 - x1) - dSinRot * (y3 - y1), y3_1 = y1 + dSinRot * (x3 - x1) + dCosRot * (y3 - y1);
int x4_1 = x1 + dCosRot * (x4 - x1) - dSinRot * (y4 - y1), y4_1 = y1 + dSinRot * (x4 - x1) + dCosRot * (y4 - y1); std::cout << "P1:(" << x1 << " , " << y1 << ") --> (" << x1_1 << ", " << y1_1 << ")" << std::endl;
std::cout << "P2:(" << x2 << " , " << y2 << ") --> (" << x2_1 << ", " << y2_1 << ")" << std::endl;
std::cout << "P3:(" << x3 << " , " << y3 << ") --> (" << x3_1 << ", " << y3_1 << ")" << std::endl;
std::cout << "P4:(" << x4 << " , " << y4 << ") --> (" << x4_1 << ", " << y4_1 << ")" << std::endl; Mat im(, , CV_8UC3);
line(im, Point(x1, y1), Point(x2, y2), Scalar(, , ), );
line(im, Point(x1, y1), Point(x4, y4), Scalar(, , ), );
line(im, Point(x3, y3), Point(x2, y2), Scalar(, , ), );
line(im, Point(x4, y4), Point(x3, y3), Scalar(, , ), ); line(im, Point(x1_1, y1_1), Point(x2_1, y2_1), Scalar(, , ), );
line(im, Point(x1_1, y1_1), Point(x4_1, y4_1), Scalar(, , ), );
line(im, Point(x3_1, y3_1), Point(x2_1, y2_1), Scalar(, , ), );
line(im, Point(x4_1, y4_1), Point(x3_1, y3_1), Scalar(, , ), ); imshow("Is ok", im);
cvWaitKey();
return ; } int main()
{
//RotateTest();
RotateTest2();
return ;
}
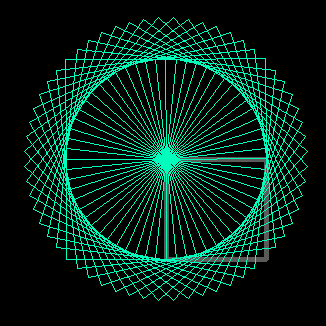
其中RotateTest2()实现了在一个Mat上,画出了旋转各个角度的样子,具体把360分成 ROTATE_COUNT这么多份。可以看到效果还是很好看的。
ROTATE_COUNT为10时:

ROTATE_COUNT为60时:
ROTATE_COUNT为180时:
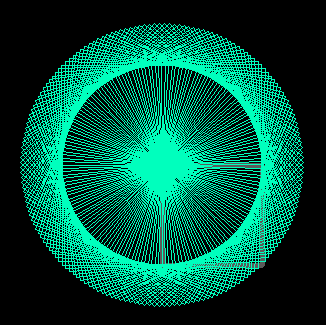
ROTATE_COUNT为360时:
旋转之后的神仙姐姐就框的比较准确了。这样就能正确的框住小姐姐了。

四、总结
数学还是很有用的。人工智能、深度学习还是需要具备数学知识的。
opencv实现坐标旋转(教你框住小姐姐)的更多相关文章
- HDU4456-Crowd (坐标旋转处理+hash处理+二维树状数组)
题意: 给出一个矩阵,初始每个位置上的值都为0,然后有两种操作 一种是更改某个位置上的值 另一种是求某个位置附近曼哈顿距离不大于K的所有位置的值的总和 技巧: 坐标旋转,使得操作之后菱形变成方方正正的 ...
- HDU 1700 Points on Cycle (坐标旋转)
题目链接:HDU 1700 Problem Description There is a cycle with its center on the origin. Now give you a poi ...
- 【30分钟学完】canvas动画|游戏基础(6):坐标旋转探究
前言 本篇主要讲坐标旋转及其应用,这是编程动画必不可少的技术. 阅读本篇前请先打好前面的基础. 本人能力有限,欢迎牛人共同讨论,批评指正. 坐标旋转 模拟场景:已知一个中心点(centerX,cent ...
- 刷抖音太累,教你用Python把高颜值的小姐姐都爬下来慢慢看
前言 文的文字及图片来源于网络,仅供学习.交流使用,不具有任何商业用途,版权归原作者所有,如有问题请及时联系我们以作处理. 作者: 星安果.AirPython 目 标 场 景 相信大家平时刷抖音短视频 ...
- python+opencv抠图并旋转(根据坐标抠图)
import cv2 import numpy as np def subimage(image, center, theta, width, height): theta *= np.pi / 18 ...
- hdu 1700 Points on Cycle(坐标旋转)
http://acm.hdu.edu.cn/showproblem.php?pid=1700 Points on Cycle Time Limit: 1000/1000 MS (Java/Others ...
- opencv图像的旋转
#include"stdafx.h"#include"opencv2/opencv.hpp" using namespace cv;// clockwise 为 ...
- eigen 四元数进行坐标旋转
(<视觉SLAM十四讲>第三讲习题7)设有小萝卜一号和二号在世界坐标系中.一号位姿q1 = [0.35, 0.2, 0.3, 0.1],t1=[0.3, 0.1, 0.1].二号位姿q2= ...
- UVA 11178 Morley's Theorem (坐标旋转)
题目链接:UVA 11178 Description Input Output Sample Input Sample Output Solution 题意 \(Morley's\ theorem\) ...
随机推荐
- AES解密后多了\0
AES加密解密之后发现多了几个空格,不知道原因.在调试时发现多了\0这种东西 不知道为什么会多这些.后来.replace("\0","")这样做了事
- 做事从来不坚持的我又开始学习PyQt了。。。。。。
链接附上,不再更新:PyQt5图形界面编程 第一部分 第一个程序 # -*- coding: utf-8 -*- import sys from PyQt5.QtWidgets import QApp ...
- centos7安装java环境和maven环境
Java 官方下载:http://www.oracle.com/technetwork/java/javase/downloads/index.html Maven官方下载:http://mave ...
- nginx常用配置
nginx.conf配置文件详解 其主要分为几个模块 全局快 从开始到events块之间的一部分内容,其作用域为全局作用域 events块 主要负责Nginx服务器与用户的网络连接 常用设置: 是否开 ...
- Ubuntu16.04下的NetCore环境搭建(附录含Ubuntu 18.04 安装 NetCore2.1)
跨平台系列汇总:http://www.cnblogs.com/dunitian/p/4822808.html#linux VSCode安装:http://www.cnblogs.com/dunitia ...
- ArcGIS for qml -关于空间参考如何选择设置
作者: 狐狸家的鱼 Github: 八至 版权声明:如需转载请获取授权和联系作者 1.关于空间参考 空间参考可以通过众所周知的ID(WKID) - 整数值来引用. 官网指南中也有对此的专门说明 htt ...
- (转)MySQL中In与Exists的区别
背景:总结mysql相关的知识点. 如果A表有n条记录,那么exists查询就是将这n条记录逐条取出,然后判断n遍exists条件. select * from user where exists s ...
- 第十一节、Harris角点检测原理(附源码)
OpenCV可以检测图像的主要特征,然后提取这些特征.使其成为图像描述符,这类似于人的眼睛和大脑.这些图像特征可作为图像搜索的数据库.此外,人们可以利用这些关键点将图像拼接起来,组成一个更大的图像,比 ...
- unittest的使用二——生成基于html的测试报告
mac下的安装: 1.下载HTMLTestRunner.py文件,下载地址http://tungwaiyip.info/software/HTMLTestRunner.html,可以复制里面的内容到一 ...
- mongodb的sql日志
在Yii2中是没有打印出mongodb的sql语句,故借用下log来查看吧. 在网上有说可以使用$model->find()->createCommand()->getRawSql( ...