OpenCV 之 空间滤波
1 空间滤波
1.1 基本概念
空间域,在图像处理中,指的是像平面本身; 空间滤波,则是在像平面内,对像素值所进行的滤波处理。
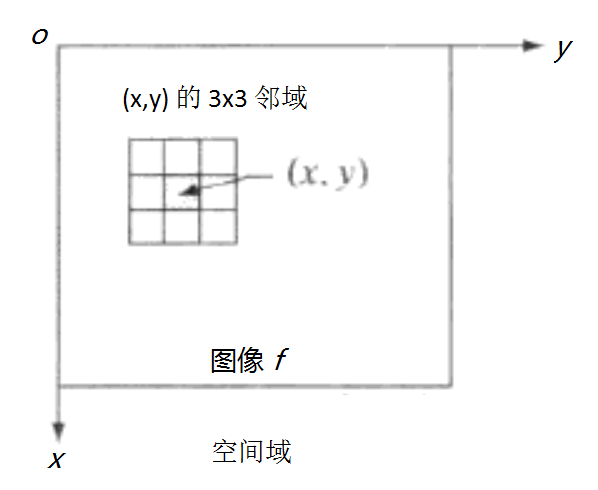
如上图所示,假设点 (x, y) 为图像 f 中的任意点,中间正方形是该点的 3x3 邻域 (也称为 “滤波器”)
当该邻域,从图像的左上角开始,以水平扫描的方式,逐个像素移动,最后到右下角时,便会产生一幅新的图像。
1.2 滤波机制
若输入图像为 f(x, y),则经空间滤波后,输出图像 g(x, y) 为
$\quad g(x, y) = \sum \limits_{s=-a}^a \: \sum \limits_{t=-b}^b {w(s, t)\:f(x+s, y+t)} $,其中 w(s, t) 为滤波器模板
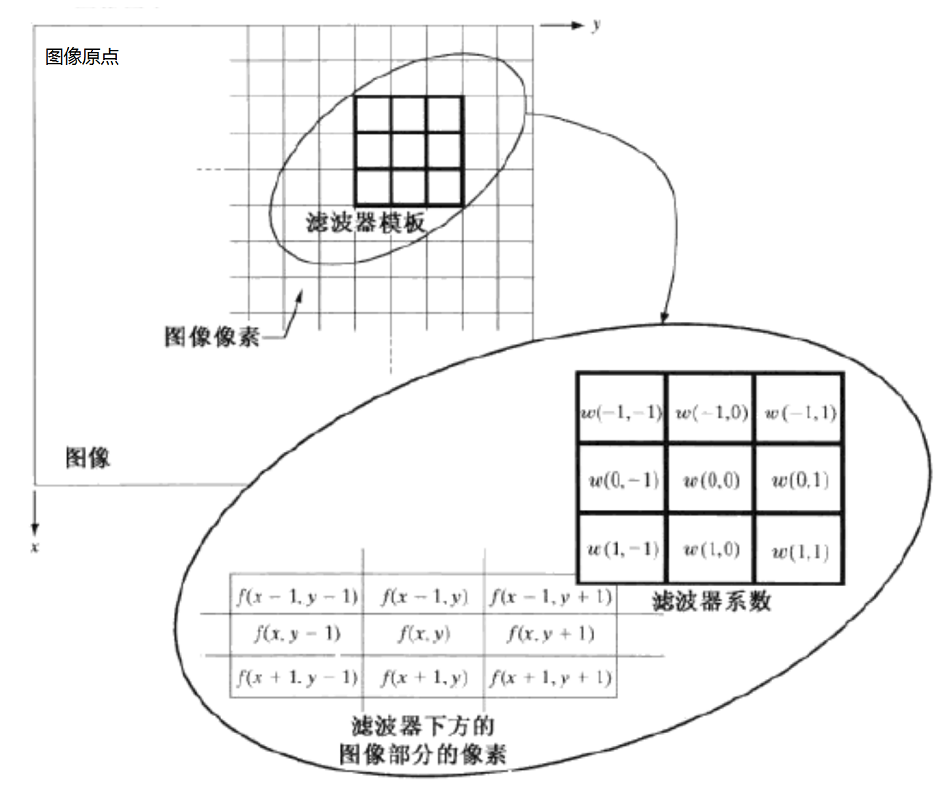
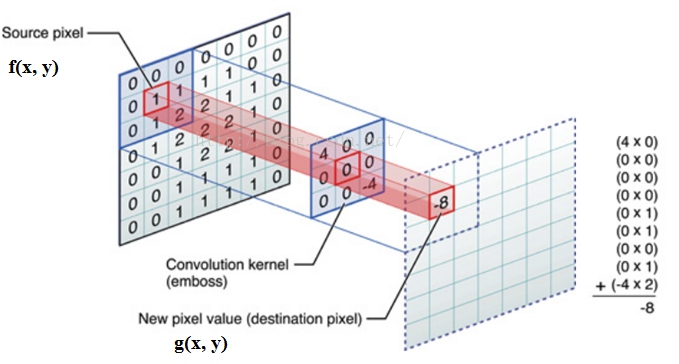
更形象的解释,如下图:卷积核(也即旋转180°的滤波器模板) 像手电筒一样,对图像 f(x, y) 中的像素,从左至右从上到下,逐个扫描计算后,便得到了输出图像 g(x, y)
1.3 相关和卷积
空间滤波中,相关和卷积,是两个容易混淆的概念,以下面的输入图像 f(x,y) 和 滤波器模板 w(x, y) 为例:
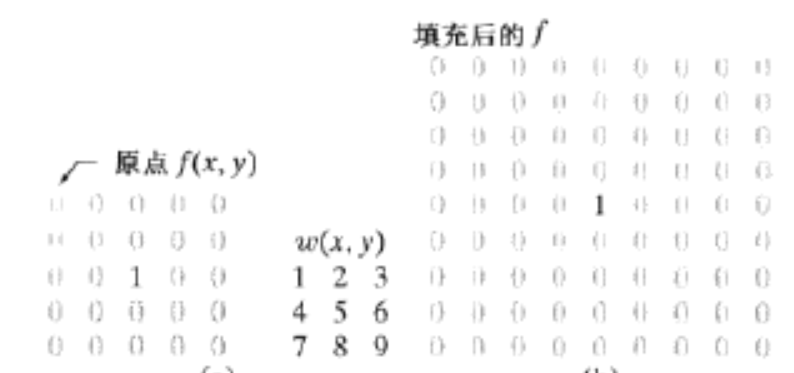
相关 (Correlation),和上述的滤波机制一样,即滤波器模板逐行扫描图像,并计算每个位置像素乘积和的过程。
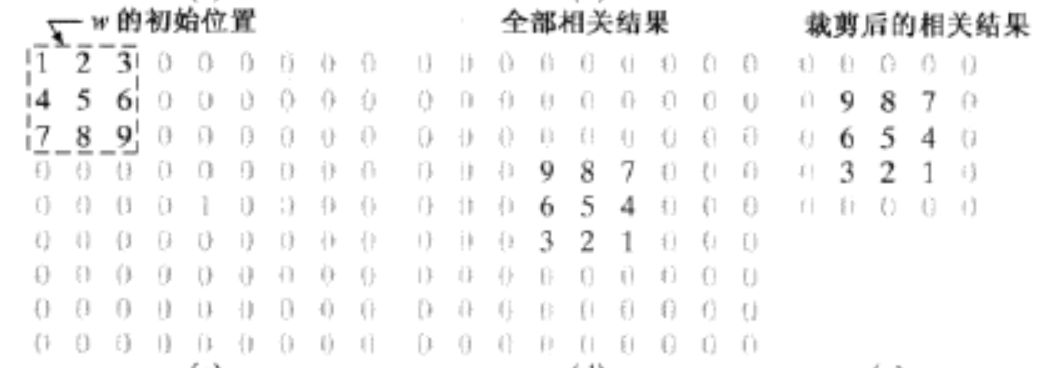
卷积 (Convolution),和 "相关" 过程类似,但是要首先旋转 180°,然后再执行和 “相关” 一样的操作。
二维中的旋转 180°,等于沿一个坐标轴翻转该模板,然后再沿另一个坐标轴再次翻转该模板。
注意:如果滤波器模板是对称的,则相关和卷积得到的结果是一样的。
2 filter2D 和 flip
OpenCV 中,用户可自定义滤波器模板,然后使用 filter2D() 函数,对图像进行空间滤波
void filter2D (
InputArray src,
OutputArray dst,
int ddepth,
InputArray kernel,
Point anchor = Point(-,-),
double delta = ,
int borderType = BORDER_DEFAULT
)
其公式如下:
$ dst(x, y) = \sum \limits_{0 < x' <kernel.cols, \\ 0<y'<kernel.rows} \: kernel(x', y') * src(x+x'-anchor.x, y+y'-anchor.y) $
可以看出,锚点 $(anchor.x, anchor.y)$ 并不是 kernel 的镜像中心。
实际上,filter2D 求的是 相关,不是 卷积。
要想得到真正的卷积 (convolution),首先,使用 flip() 函数翻转 kernel,然后,设置新的锚点 $(kernel.cols - anchor.x - 1, kernel.rows -anchor.y -1)$
void flip (
InputArray src,
OutputArray dst,
int flipCode // 0, flip around x-axis; 1,flip around y-axis; -1, flip around both axes
);
3 代码示例
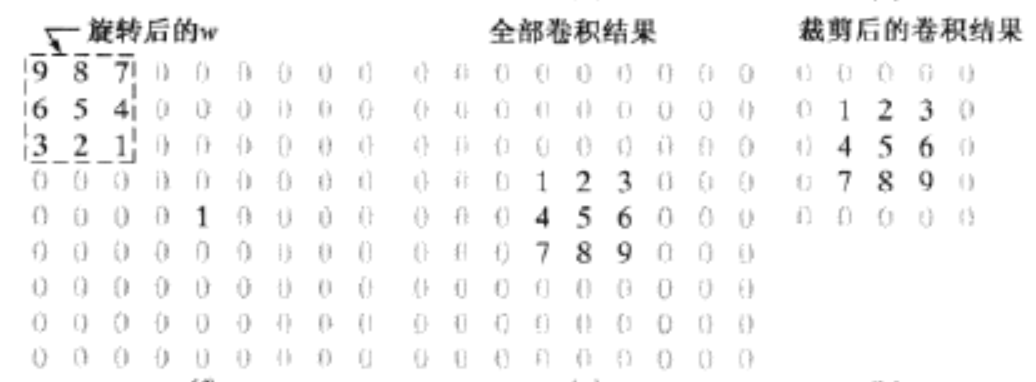
下面详细阐述,如何设计滤波器模板,配合 filter2D() 函数,实现图像的一阶和二阶偏导运算。
在 x 方向上,一阶和二阶偏导数的计算结果,如下图所示:
3.1 一阶偏导
图像在 x 和 y 方向的一阶偏导如下:
$\frac {\partial f}{\partial x} = f(x+1,y) - f(x,y)$
$\frac {\partial f}{\partial y} = f(x, y+1) - f(x, y)$
则对应的滤波器模板为 $K_{x} = \begin{bmatrix} -1 & 1 \end{bmatrix} $,$K_{y} = \begin{bmatrix} -1 \\ 1 \end{bmatrix} $
3.2 二阶偏导
同样的,在 x 和 y 方向的二阶偏导如下:
$\frac {\partial f^2} {\partial x^2} = f(x+1, y) + f(x-1, y)- 2f(x,y)$
$\frac {\partial f^2}{\partial y^2} = f(x, y+1) + f(x, y-1)- 2f(x,y)$
$\frac {\partial f^2}{\partial x \partial y} = f(x+1, y+1) - f(x+1, y) - f(x, y+1)+ f(x,y)$
则各自的滤波器模板为 $K_{xx} = \begin{bmatrix} 1 & -2 & 1 \end{bmatrix} $,$K_{yy} = \begin{bmatrix} 1 \\ -2 \\ 1 \end{bmatrix} $,$K_{xy} = \begin{bmatrix} 1 & -1 \\ -1 & 1 \end{bmatrix} $
3.3 代码实现
#include "opencv2/imgproc.hpp"
#include "opencv2/highgui.hpp" using namespace cv; int main()
{
// 读取图像
Mat src = imread("test.bmp");
if(src.empty()) {
return -;
}
cvtColor(src, src, CV_BGR2GRAY); Mat kx = (Mat_<float>(,) << -, ); // 1行2列的 dx 模板
Mat ky = (Mat_<float>(,) << -, ); // 2行1列的 dy 模板 Mat kxx = (Mat_<float>(,) << , -, ); // 1行3列的 dxx 模板
Mat kyy = (Mat_<float>(,) << , -, ); // 3行1列的 dyy 模板
Mat kxy = (Mat_<float>(,) << , -, -, ); // 2行2列的 dxy 模板 // 一阶偏导
Mat dx, dy;
filter2D(src, dx, CV_32FC1, kx);
filter2D(src, dy, CV_32FC1, ky); // 二阶偏导
Mat dxx, dyy, dxy;
filter2D(src, dxx, CV_32FC1, kxx);
filter2D(src, dyy, CV_32FC1, kyy);
filter2D(src, dxy, CV_32FC1, kxy); // 显示图像
imshow("dx", dx);
imshow("dy", dy);
imshow("dxx", dxx);
imshow("dyy", dyy);
imshow("dxy", dxy); waitKey();
}
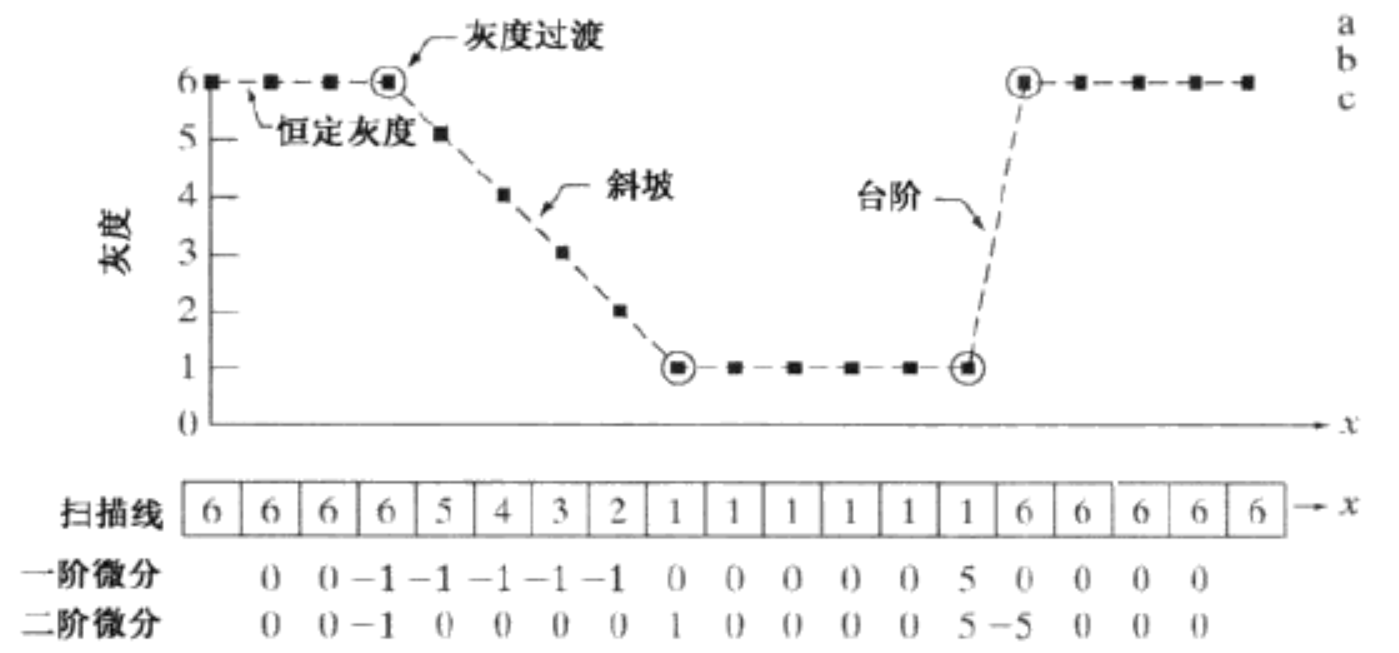
以袋装洗手液作为输入图像,得到的偏导图像如下:
参考资料:
OpenCV Tutorials / imgproc module / Making your own linear filters
<数字图像处理> 冈萨雷斯, 第3章 灰度变换与空间滤波
图像卷积与滤波的一些知识点,zouxy09
OpenCV 之 空间滤波的更多相关文章
- 13、OpenCV实现图像的空间滤波——图像平滑
1.空间滤波基础概念 1.空间滤波基础 空间滤波一词中滤波取自数字信号处理,指接受或拒绝一定的频率成分,但是空间滤波学习内容实际上和通过傅里叶变换实现的频域的滤波是等效的,故而也称为滤波.空间滤波主要 ...
- 14、OpenCV实现图像的空间滤波——图像锐化及边缘检测
1.图像锐化理论基础 1.锐化的概念 图像锐化的目的是使模糊的图像变得清晰起来,主要用于增强图像的灰度跳变部分,这一点与图像平滑对灰度跳变的抑制正好相反.而且从算子可以看出来,平滑是基于对图像领域的加 ...
- OpenCV 之 图像平滑
1 图像平滑 图像平滑,可用来对图像进行去噪 (noise reduction) 或 模糊化处理 (blurring),实际上图像平滑仍然属于图像空间滤波的一种 (低通滤波) 既然是滤波,则图像中任 ...
- OpenCV 之 自定义滤波
图像处理中,"空间域" 指的是图像平面,因此,空间滤波 可定义为:在图像平面内对像素灰度值进行的滤波 1 空间滤波 1.1 滤波过程 如图,Filter 是一个 3x3 滤波核 ...
- opencv在图像显示中文
在图像定位和模式识别时,经常需要把结果标注到图片上,标注内容可以是数字字母.矩形框等(opencv支持的)或者是中文汉字(借助freetype). 1.显示数字/矩形框 #include <op ...
- opencv中Mat与IplImage,CVMat类型之间转换
opencv中对图像的处理是最基本的操作,一般的图像类型为IplImage类型,但是当我们对图像进行处理的时候,多数都是对像素矩阵进行处理,所以这三个类型之间的转换会对我们的工作带来便利. Mat类型 ...
- opencv源码:cascadedetect
级联分类器检测类CascadeClassifier,提供了两个重要的方法: CascadeClassifier cascade_classifier; cascade_classifier.load( ...
- 基于OpenCV的车辆检测与追踪的实现
最近老师布置了一个作业,是做一个基于视频的车辆检测与追踪,用了大概两周的时间做了一个简单的,效果不是很理想,但抑制不住想把自己的一些认识写下来,这里就把一些网络上的博客整理一下分享给大家,希望帮助到大 ...
- OpenCV人脸识别Eigen算法源码分析
1 理论基础 学习Eigen人脸识别算法需要了解一下它用到的几个理论基础,现总结如下: 1.1 协方差矩阵 首先需要了解一下公式: 共公式可以看出:均值描述的是样本集合的平均值,而标准差描述的则是样本 ...
随机推荐
- java.lang.ClassNotFoundException: com.radiadesign.catalina.session.RedisSessionHandlerValve
org.apache.tomcat.util.digester.Digester.startElement Begin event threw exception java.lang.ClassNot ...
- 腾讯工程师教你玩转 RocksDB
欢迎大家前往云+社区,获取更多腾讯海量技术实践干货哦~ 作者:腾讯云数据库内核团队 原文标题:[腾讯云CDB]教你玩转MyRocks/RocksDB-STATISTICS与后台线程篇 0. Intro ...
- 检查型异常(Checked Exception)与非检查型异常(Unchecked Exception)
这两个概念看了忘,碰着了又看,老是傻傻的分不清楚,今天把心得结合从网上搜的资料简单整理一下,希望帮自己明确区分开这两个概念,并牢牢的记住 1.检查型异常(Checked Exception) 个人理解 ...
- 添加FTP用户(vsftpd)
1.环境:ftp为vsftp. 用户名为test.默认路径为/home/test 2.新建用户(当前是root用户) 运行命令:"useradd -d /home/test test&quo ...
- 【转】char*,string,CString,int,char[]之间的转换
CString 头文件#include <cstring>.CString 转char * CString cstr; ..data(),返回没有”/“的字符串数组..c_str(),返 ...
- HDU 2141 Can you find it? [二分]
Can you find it? Give you three sequences of numbers A, B, C, then we give you a number X. Now you n ...
- 51Nod 欢乐手速场1 B 序列变换[容斥原理 莫比乌斯函数]
序列变换 alpq654321 (命题人) 基准时间限制:1 秒 空间限制:131072 KB 分值: 40 lyk有两序列a和b. lyk想知道存在多少对x,y,满足以下两个条件. 1:gcd( ...
- 树莓派小车(三)Python控制小车
正文之前 由于最近忙于复习赶考,所以暂时没有拿起树莓派小车,直到昨天,终于空出时间来把代码整理一下来和大家分享. 正文 在树莓派小车系列之二中,讲到了树莓派的引脚定义方式有两种: PHYSICAL N ...
- xcode7中使用cocos2d-x3.8的webview控件
在XCode7中使用cocos2d-x 3.3以上版本的WebView控件时,碰到了编译错误 App Transport Security has blocked a cleartext HTTP ( ...
- RDB持久化
redis是一个内存数据库,所有我们需要将他定时存在磁盘上,如果没有开启AOF,那么会生成RDB文件进行存储,其实就是个二进制文件 RBD文件通过SAVE BGSAVE进行创建, SAVE会阻塞服务器 ...