STM32F407——使用systick定时器裸机制作延时函数
准备工作:
软件:keil5
硬件:STM32F407ZET6芯片,gec6818开发板,st-link调试器
文档:《开发板原理图》,《Cortex M3与M4权威指南》,《STM32F407参考手册_英文》
项目结构:
相关电路图:
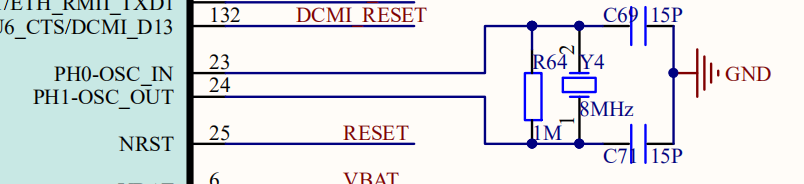
- 开发板外部时钟8MHz,电路(来自《开发板原理图》):
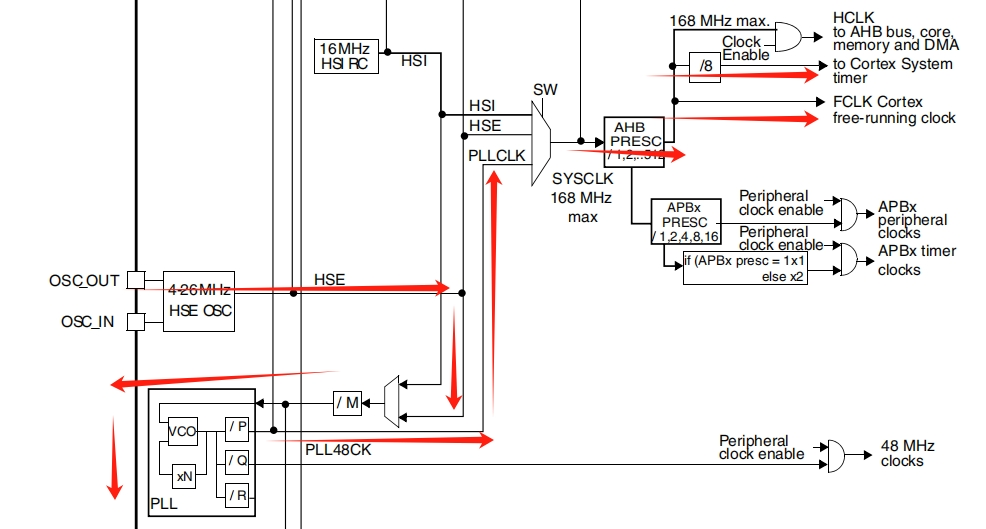
- 内核时钟电路图(来自《STM32F407参考手册_英文》5.2章):
一、systick定时器使用逻辑
根据《Cortex M3与M4权威指南》第8章:
内核有四个寄存器用于控制和使用定时器:

- 控制与状态寄存器用于选择时钟、查看计数器是否数到了0、时钟使能
- 重载数值寄存器用于装载计数次数
- 当前数值寄存器用于读取当前值,写入任意值会使之清零
- 校准数值寄存器本篇没有使用
英文版权威指南直接给出了参考代码:
SysTick->CTRL = 0; // Disable SysTick
SysTick->LOAD = 0xFF; // Count from 255 to 0 (256 cycles)
SysTick->VAL = 0; // Clear current value as well as count fla
SysTick->CTRL = 5; // Enable SysTick timer with processor clock
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set
SysTick->CTRL = 0; // Disable SysTick
计数、重载、使能、计数是否到头这些操作都很好理解,重要的是STCLK、FCLK两个时钟源的频率到底是多少,否则就无法知道到底计数了多长时间。
通过内核时钟原理图可以知道,STCLK、FCLK两个时钟源挂载于AHB1总线上,而总线时钟是由HSE外部时钟经过PLL(倍频锁相环)放大得到,使用PLL的M、N、P、Q等参数。
根据电路图我们可以计算得到AHB1总线频率的公式是:
HSE_VALUE / PLL_M * PLL_N / PLL_P
参数在代码中的定义如下:
-- system_stm32f4xx.c 文件--
/************************* PLL Parameters *************************************/
#if defined (STM32F40_41xxx) || defined (STM32F427_437xx) || defined (STM32F429_439xx) || defined (STM32F401xx)
/* PLL_VCO = (HSE_VALUE or HSI_VALUE / PLL_M) * PLL_N */
#define **PLL_M** 8 // 库文件默认25
#else /* STM32F411xE */
#if defined (USE_HSE_BYPASS)
#define PLL_M 8
#else /* STM32F411xE */
#define PLL_M 16
#endif /* USE_HSE_BYPASS */
#endif /* STM32F40_41xxx || STM32F427_437xx || STM32F429_439xx || STM32F401xx */
/* USB OTG FS, SDIO and RNG Clock = PLL_VCO / PLLQ */
#define PLL_Q 7
#if defined (STM32F40_41xxx)
#define PLL_N 336
/* SYSCLK = PLL_VCO / PLL_P */
#define PLL_P 2
#endif /* STM32F40_41xxx */
/******************************************************************************/
外部时钟频率定义如下:
-- stm32f4xx.h文件 --
/**
* @brief In the following line adjust the value of External High Speed oscillator (HSE)
used in your application
Tip: To avoid modifying this file each time you need to use different HSE, you
can define the HSE value in your toolchain compiler preprocessor.
*/
#if !defined (HSE_VALUE)
// 库文件默认25000000
#define HSE_VALUE ((uint32_t)8000000) /*!< Value of the External oscillator in Hz */
#endif /* HSE_VALUE */
所以AHB1总线的频率为:
8MHz / 8 * 336 / 2 = 168MHz
也就是芯片标注的可以达到的最大频率。因此:
- FCLK频率:168MHz
- STCLK频率:168MHz / 8 = 21MHz
而频率越低,说明单次计时时间更长,在寄存器计数次数有限的情况下,总时长更长,所以我们选择STCLK作为时钟源。
所以接下来代码就水到渠成了。
二、完整代码
/********************************************************************************
* @file GPIO/GPIO_IOToggle/main.c
* @author MCD Application Team
* @version V1.4.0
* @date 2025/4/25
* @brief 按键中断点亮led后延时熄灭
******************************************************************************/
#include "stm32f4xx.h"
// KEY引脚初始化
void KEY_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 打开外设时钟 */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
/* 初始化PA0 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOA, &GPIO_InitStructure);
}
// LED引脚初始化
void LED_Init()
{
GPIO_InitTypeDef GPIO_InitStructure;
/* 打开外设时钟 */
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE);
/* 初始化PF9 */
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_9;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_OUT;
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_NOPULL;
GPIO_Init(GPIOF, &GPIO_InitStructure);
}
// 配置中断
static void EXTILine0_Config(void)
{
EXTI_InitTypeDef EXTI_InitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
// 打开GPIOA、SYSCFG外设时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);
RCC_APB2PeriphClockCmd(RCC_APB2Periph_SYSCFG, ENABLE);
/* Connect EXTI Line0 to PA0 pin
EXTI_PortSourceGPIOx : selects the GPIO port
EXTI_PinSourcex: specifies the EXTI line to be configured.
*/
SYSCFG_EXTILineConfig(EXTI_PortSourceGPIOA, EXTI_PinSource0);
/* Configure EXTI Line0 ,配置中断线路、中断模式、上升沿、使能*/
EXTI_InitStructure.EXTI_Line = EXTI_Line0;
EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;
EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling;
EXTI_InitStructure.EXTI_LineCmd = ENABLE;
EXTI_Init(&EXTI_InitStructure);
/* Enable and set EXTI Line0 Interrupt to the lowest priority,NVIC在内核中负责调度 */
NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0x0F;
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0x0F;
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
// 选择外部时钟源STCLK作为计时时钟源,来自于HSE
// 源头来自外部时钟8MHz,经过PLL倍频锁相环放大后得到ABH1总线的168MHZ,然后再/8,得到21MHz(STCLK)
// 或者也可以直接使用168MHz(FCLK),但是在寄存器位数固定的情况下,21MHz可以计数的时长更长,所以选择21MHz
// 21MHz,1/21us计数一次,24位倒数寄存器的最大计数次数为2^24, 换算成us,为798915us
// 延时微秒
void delay_us(unsigned int n)
{
SysTick->CTRL = 0; // Disable SysTick
SysTick->LOAD = n * 21 - 1; // Count from 255 to 0 (256 cycles),0算一次,所以要减1
SysTick->VAL = 0; // Clear current value as well as count fla
// 0位控制使能,2位控制选择FCLK(1)还是STCLK(1),这里选择stclk
SysTick->CTRL = 1; // Enable SysTick timer with processor clock
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set,控制寄存器的第16位用于检测是否计数结束
SysTick->CTRL = 0; // Disable SysTick
}
// 21MHz,1/21us计数一次,24位倒数寄存器的最大计数次数为2^24, 换算成ms,为798ms
// 延时毫秒
void delay_ms(unsigned int n)
{
SysTick->CTRL = 0; // Disable SysTick
SysTick->LOAD = n * 21 * 1000 - 1; // Count from 255 to 0 (256 cycles),0算一次,所以要减1
SysTick->VAL = 0; // Clear current value as well as count fla
// 0位控制使能,2位控制选择FCLK(1)还是STCLK(1),这里选择stclk
SysTick->CTRL = 1; // Enable SysTick timer with processor clock
while ((SysTick->CTRL & 0x00010000)==0);// Wait until count flag is set,控制寄存器的第16位用于检测是否计数结束
SysTick->CTRL = 0; // Disable SysTick
}
// 延时秒
void delay_s(unsigned int n)
{
while(n--)
{
delay_ms(500);
delay_ms(500);
}
}
// 非精确延时函数
void delay(int n)
{
while(n--);
}
// 线路0中断处理函数
void EXTI0_IRQHandler(void)
{
// led引脚置位
GPIO_ResetBits(GPIOF, GPIO_Pin_9);
// 延时2s
delay_s(2);
// 清除中断挂起状态
EXTI_ClearITPendingBit(EXTI_Line0);
}
int main()
{
// 初始化按键
KEY_Init();
// 初始化LED灯
LED_Init();
// 初始化NVIC外设
EXTILine0_Config();
while(1)
{
// LED默认熄灭
GPIO_SetBits(GPIOF, LED0_PIN);
}
}
三、总结
延时函数代码本身其实并不是很难编写,只有短短几行代码,而且官方也有很清楚的示例代码,寄存器的对象也做了完整的封装,难就难在理解stm32内核时钟的组成和由来,从而通过手动调整参数满足自己的要求。
STM32F407——使用systick定时器裸机制作延时函数的更多相关文章
- 利用滴答定时器(SysTick)实现简单的延时函数
预备知识: 对标准库来说,如果定义了时钟频率,则系统会默认初始化该时钟频率. SysTick是CM4的内核外设,是一个24位的向下递减计数器,每次计数时间是1/SYSCLK,即1/168000000. ...
- STM32时钟系统之利用 systick 定时器来实现准确的延时。
本篇文章带着大家来认识一下 STM32 的时钟系统,以及利用 systick 定时器来实现一个比较准确的延时. 我们首先从时钟说起,时钟在MCU中的作用,就好比于人类的心脏一样不可或缺.STM32 的 ...
- 5-3 Linux内核计时、延时函数与内核定时器【转】
转自:http://www.xuebuyuan.com/510594.html 5-3 Linux内核计时.延时函数与内核定时器 计时 1. 内核时钟 1.1 内核通过定时器(timer)中断来跟 ...
- 实现流水灯以间隔500ms的时间闪烁(系统定时器SysTick实现的精确延时)
/** ****************************************************************************** * @file main.c * ...
- 【转】STM32 不占用定时器(包括SysTick)实现精确延时(巧用DWT)
/** ****************************************************************** * file core_delay.c * author ...
- STM32学习及应用笔记一:SysTick定时器学习及应用
这几年一直使用STM32的MCU,对ARM内核的SysTick计时器也经常使用,但几乎没有仔细了解过.最近正好要在移植一个新的操作系统时接触到了这块,据比较深入的了解了一下. 1.SysTick究竟是 ...
- STM32学习笔记:系统时钟和SysTick定时器
原文:http://blog.sina.com.cn/s/blog_49cb42490100s60d.html 1. STM32的时钟系统 在STM32中,一共有5个时钟源,分别是HSI.HS ...
- stm32中的延时函数
//粗延时函数,微秒 void delay_nus(u16 time) { u16 i=0; while(time--) { i=10; //自己定义 while(i--) ; } } //毫秒级的 ...
- STM32延时函数的四种方法
单片机编程过程中经常用到延时函数,最常用的莫过于微秒级延时delay_us()和毫秒级delay_ms().本文基于STM32F207介绍4种不同方式实现的延时函数. 1.普通延时 这种延时方式应该是 ...
- SYSTick 定时器
CM3 内核的处理器,内部包含了一个 SysTick 定时器,(SysTick 的时钟源自 HCLK 的 8 分频,8个系统时钟周期systick跳一个,即8*1/72M=1/9 us)Sys ...
随机推荐
- vue-element-template去除登录
一.修改src目录下的permission.js文件 1.注释 //if (hasToken) { // if (to.path === '/login') { // // if is logged ...
- 在线客服的独立产品之路:如何将复杂的 .NET 系统打包到 Docker 镜像,使之能一键上线
我在业余时间开发了一款自己的独立产品:升讯威在线客服与营销系统.陆陆续续开发了几年,从一开始的偶有用户尝试,到如今线上环境和私有化部署均有了越来越多的稳定用户,在这个过程中,我也积累了不少如何开发运营 ...
- CF607B Zuma 题解
CF607B Zuma 不知道为什么你谷会评蓝,这不是很基础的区间DP吗. Problem - 607B - Codeforces 题意简述 消除回文子串的最小次数. 思路 对于区间\([i,j]\) ...
- 越“挖”越有料,天翼云“息壤”助攻DeepSeek变身万能搭子!
还在为DeepSeek服务器繁忙而抓狂? 还在为API调用费用涨价而头疼? 还在为数据安全而担忧? 别急! 天翼云"息壤"算力互联调度平台出马 全面解锁DeepSeek新玩法 带你 ...
- 4个Sprint目标的挑战以及解决的技巧
1. Sprint 目标太大 有时,您的团队可能会尝试将过多的任务塞进冲刺中.抵制在冲刺中承担太多的诱惑,因为这会损害你的速度和持续交付的能力. 2. Sprint目标是模糊的 冲刺目标通常是不确定的 ...
- Flume - [01] 概述
一.什么是Flume Flume 是Cloudera提供的一个高可用,高可靠的,分布式的海量日志采集.聚合和传输的系统. Flume最主要的作用就是:实时读取服务器本地磁盘的数据,将数据写入HDFS. ...
- 基于Potplayer类播放器或Action!类录屏软件调取摄像头方式的定时抓拍保存图像方法小结
前面已经总结了基于Maxmspjitter的相关方法,还有基于Unity的,还有基于Openframeworks的,今天来一篇基于普通软件的: 1.专业播放器类的软件,如Potplayer.vlc.o ...
- 【攻防世界】ez_curl
ez_curl 题目来源 攻防世界 NO.GFSJ1188 题解 是一个PHP的代码审计 同时还提供了一个附件app.js,打开后内容如下 app.js中: req.query.admin.inclu ...
- camunda工作流实战项目【PRO版】(表单设计器+流程编辑器,零代码创建流程)
pro版本主要对流程设计器.表单模块做了优化和改造,下面是各版本功能对比 一.整体情况介绍 基于ruoyi平台和camunda工作流开发而成,结合bpmn.js流程编辑器和vform表单设计器,实现常 ...
- EAR_v3 《浮声三》 智能化图书管理系统
EAR_v3 <浮声三> 搭建于 Actix_Web 框架下的智能化图书管理系统 本项目的前身是 <Rusty_Borders 危墙> 的 在线控制系统 部分,经过大量开发工作 ...