Canny算子边缘检测(cvCanny)
Canny是常用的边缘检测方法,其特点是试图将独立边的候选像素拼装成轮廓。
John Canny于1986年提出Canny算子,它与Marr(LoG)边缘检测方法类似,也属于是先平滑后求导数的方法。
John Canny研究了最优边缘检测方法所需的特性,给出了评价边缘检测性能优劣的三个指标:
1.好的信噪比,即将非边缘点判定为边缘点的概率要低,将边缘点判为非边缘点的概率要低;
2.高的定位性能,即检测出的边缘点要尽可能在实际边缘的中心;
3. 对单一边缘仅有唯一响应,即单个边缘产生多个响应的概率要低,并且虚假响应边缘应该得到最大抑制。
用一句话说,就是希望在提高对景物边缘的敏感性的同时,可以抑制噪声的方法才是好的边缘提取方法。
Canny算子求边缘点具体算法步骤如下:
1. 用高斯滤波器平滑图像.
2. 用一阶偏导有限差分计算梯度幅值和方向.
3. 对梯度幅值进行非极大值抑制 .
4. 用双阈值算法检测和连接边缘
- image
- 输入 8-比特、单通道 (二值) 图像,当用CV_HOUGH_PROBABILISTIC方法检测的时候其内容会被函数改变
- line_storage
- 检测到的线段存储仓. 可以是内存存储仓 (此种情况下,一个线段序列在存储仓中被创建,并且由函数返回),或者是包含线段参数的特殊类型(见下面)的具有单行/单列的矩阵(CvMat*)。矩阵头为函数所修改,使得它的 cols/rows 将包含一组检测到的线段。如果 line_storage 是矩阵,而实际线段的数目超过矩阵尺寸,那么最大可能数目的线段被返回(对于标准hough变换,线段按照长度降序输出).
- method
- Hough 变换变量,是下面变量的其中之一:
- CV_HOUGH_STANDARD - 传统或标准 Hough 变换. 每一个线段由两个浮点数 (ρ, θ) 表示,其中 ρ 是直线与原点 (0,0) 之间的距离,θ 线段与 x-轴之间的夹角。因此,矩阵类型必须是 CV_32FC2 type.
- CV_HOUGH_PROBABILISTIC - 概率 Hough 变换(如果图像包含一些长的线性分割,则效率更高). 它返回线段分割而不是整个线段。每个分割用起点和终点来表示,所以矩阵(或创建的序列)类型是 CV_32SC4.
- CV_HOUGH_MULTI_SCALE - 传统 Hough 变换的多尺度变种。线段的编码方式与 CV_HOUGH_STANDARD 的一致。
- rho
- 与象素相关单位的距离精度
- theta
- 弧度测量的角度精度
- threshold
- 阈值参数。如果相应的累计值大于 threshold, 则函数返回的这个线段.
- param1
- 第一个方法相关的参数:
- 对传统 Hough 变换,不使用(0).
- 对概率 Hough 变换,它是最小线段长度.
- 对多尺度 Hough 变换,它是距离精度 rho 的分母 (大致的距离精度是 rho 而精确的应该是 rho / param1 ).
- param2
- 第二个方法相关参数:
- 对传统 Hough 变换,不使用 (0).
- 对概率 Hough 变换,这个参数表示在同一条直线上进行碎线段连接的最大间隔值(gap), 即当同一条直线上的两条碎线段之间的间隔小于param2时,将其合二为一。
- 对多尺度 Hough 变换,它是角度精度 theta 的分母 (大致的角度精度是 theta 而精确的角度应该是 theta / param2).
- 外部链接:经典的canny自调整阈值算法的一个opencv的实现见在OpenCV中自适应确定canny算法的分割门限
函数 cvHoughLines2 实现了用于线段检测的不同 Hough 变换方法. Example. 用 Hough transform 检测线段
-------------------------------------------------------------------------------------------------------
/*code*/
注意:cvCanny只接受单通道图像作为输入,因此cvLoadImage的第二给参数表示是否加载有颜色的图像,因设为0,表示单通道图像,故src = cvLoadImage( argv[1], 0 );
否则会出现编译错误,会提示canny.cpp不合法。
- #include <highgui.h>
- #include <cv.h>
- #include <cxcore.h> //人脸识别的一个库文件
- //Canny:Implements Canny algorithm for edge detection.
- int main( int argc, char** argv )
- {
- IplImage* src = NULL;
- IplImage* dst = NULL;
- //载入图像,转换为灰度图
- src = cvLoadImage( argv[1], 0 );
- //为canny边缘图像申请空间,1表示单通道灰度图
- dst = cvCreateImage( cvGetSize( src ), IPL_DEPTH_8U, 1 );
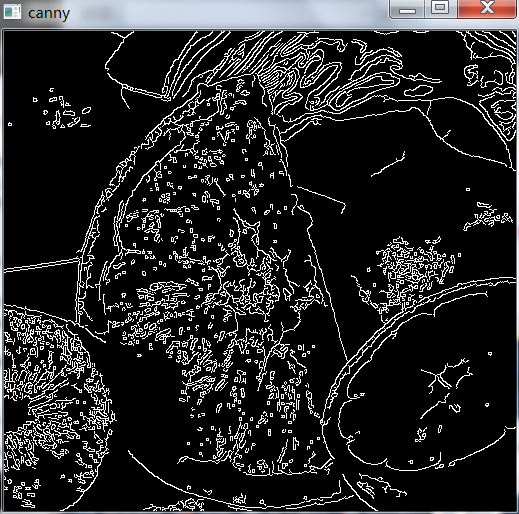
- cvCanny( src, dst, 50, 150, 3 );//边缘检测
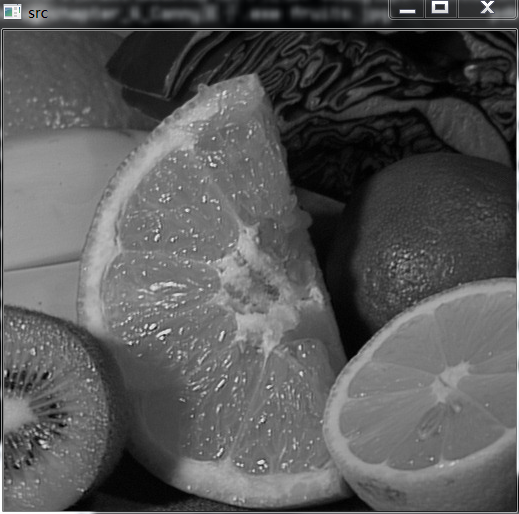
- cvNamedWindow( "src", 1 );
- cvNamedWindow( "canny", 1 );
- cvShowImage( "src", src );
- cvShowImage( "canny", dst );
- cvWaitKey(0);
- cvReleaseImage( &src );
- cvReleaseImage( &dst );
- cvDestroyAllWindows();
- return 0;
- }
-------------------------------------------------------------------------------------------------------
/*result*/
另一片文章描述:
/*code*/
程序中用到了cvCvtColor色彩空间转换,将输入图像从一个色彩空间转换为另外一个色彩空间,Canny处理的是单通道图像,然后转换为三通道图像再使用Hough变换。
- #include <highgui.h>
- #include <cv.h>
- #include <math.h>
- int main(int argc, char** argv)
- {
- IplImage* src;
- src = cvLoadImage( argv[1], 0 ); //加载灰度图
- IplImage* dst = cvCreateImage( cvGetSize( src ), IPL_DEPTH_8U, 1 );
- IplImage* color_dst = cvCreateImage( cvGetSize( src ), IPL_DEPTH_8U, 3 ); //创建三通道图像
- CvMemStorage* storage = cvCreateMemStorage(0);
- CvSeq* lines = 0;
- cvCanny( src, dst, 50, 100, 3 ); //首先运行边缘检测,结果以灰度图显示(只有边缘)
- cvCvtColor( dst, color_dst, CV_GRAY2BGR ); //色彩空间转换,将dst转换到另外一个色彩空间即3通道图像
- lines = cvHoughLines2( dst, storage, CV_HOUGH_PROBABILISTIC, 1, CV_PI/180, 80, 30, 10 ); //直接得到直线序列
- //循环直线序列
- for( int i = 0; i < lines ->total; i++ ) //lines存储的是直线
- {
- CvPoint* line = ( CvPoint* )cvGetSeqElem( lines, i ); //lines序列里面存储的是像素点坐标
- cvLine( color_dst, line[0], line[1], CV_RGB( 0, 255, 0 ) ); //将找到的直线标记为红色
- //color_dst是三通道图像用来存直线图像
- }
- cvNamedWindow( "src", 1 );
- cvShowImage( "src", src );
- cvNamedWindow( "Hough", 1 );
- cvShowImage( "Hough", color_dst );
- cvWaitKey(0);
- return 0;
- }
----------------------------------------------------------------------------------------------------
/*result*/


Canny算子边缘检测(cvCanny)的更多相关文章
- Python 图像处理 OpenCV (12): Roberts 算子、 Prewitt 算子、 Sobel 算子和 Laplacian 算子边缘检测技术
前文传送门: 「Python 图像处理 OpenCV (1):入门」 「Python 图像处理 OpenCV (2):像素处理与 Numpy 操作以及 Matplotlib 显示图像」 「Python ...
- Python 图像处理 OpenCV (13): Scharr 算子和 LOG 算子边缘检测技术
前文传送门: 「Python 图像处理 OpenCV (1):入门」 「Python 图像处理 OpenCV (2):像素处理与 Numpy 操作以及 Matplotlib 显示图像」 「Python ...
- [OpenCV入门教程之十二】OpenCV边缘检测:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑
http://blog.csdn.net/poem_qianmo/article/details/25560901 本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog ...
- 学习 opencv---(11)OpenC 边缘检测:Canny算子,Sobel算子,Laplace算子,Scharr滤波器
本篇文章中,我们将一起学习OpenCV中边缘检测的各种算子和滤波器——Canny算子,Sobel算子,Laplace算子以及Scharr滤波器.文章中包含了五个浅墨为大家准备的详细注释的博文配套源代码 ...
- 边缘检测:Canny算子,Sobel算子,Laplace算子
1.canny算子 Canny边缘检测算子是John F.Canny于 1986 年开发出来的一个多级边缘检测算法.更为重要的是 Canny 创立了边缘检测计算理论(Computational the ...
- canny 算子python实现
1. Canny介绍 Canny算子与Marr(LoG)边缘检测方法类似,也属于是先平滑后求导数的方法.John Canny研究了最优边缘检测方法所需的特性,给出了评价边缘检测性能优劣的三个指标: 1 ...
- python opencv Sobel、Laplace、canny算子的边缘提取 以及参数解析
前提:各种算子不完全区分好坏,但根据我实际操作分析得到,有的算子之间效果大相径庭,但有的也很相似,也就是各有各的用法,这里按 Sobel.Laplace.canny三种算子作比较,看其结果: 一. ...
- 【OpenCV新手教程之十二】OpenCV边缘检測:Canny算子,Sobel算子,Laplace算子,Scharr滤波器合辑
本系列文章由@浅墨_毛星云 出品,转载请注明出处. 文章链接:http://blog.csdn.net/poem_qianmo/article/details/25560901 作者:毛星云(浅墨) ...
- Canny算子
Canny边缘检测算子是John F. Canny于1986年开发出来的一个多级边缘检测算法.更为重要的是Canny创立了“边缘检测计算理论”(computational theory of edge ...
随机推荐
- Groovy 转换JSON和生产JSON
Groovy 类和JSON之间的相互转换,主要在groovy.json包下面 1. JsonSlurper JsonSlurper 这个类用于转换JSON文本或从Groovy 数据结构中读取内容例如m ...
- redis五种数据类型的使用(zz)
redis五种数据类型的使用 redis五种数据类型的使用 (摘自:http://tech.it168.com/a2011/0818/1234/000001234478_all.shtml ) 1.S ...
- CSS实现完美垂直居中
之前看到很多人一直都问这个问题,不过当时我没当一回事,因为在 CSS 中要垂直居中,多数是在有高度的情况下,或者容器高度不定的情况下才用,看上去比较舒服,而且实现的方法也不少,不一定要拘泥于和 tab ...
- Unity随记
//切换场景时怎么能让音乐不停? /////////////////////////////////////////////////////////////////// //切换场景时怎么防止某个物体 ...
- 什么是F#
作者:Alexey Bykov@EastBancTech原文:http://bit.ly/1nGroOz翻译:kk1982.com转载请注明 简介 F#是由微软研究团队为.NET平台研发的一种现代函数 ...
- 如何彻底删除antlr-2.7.2.jar
1 找到Local\MyEclipse\MyEclipse 10\configuration\org.eclipse.osgi\bundles\12\1\.cp\data\1.3\lib,将antlr ...
- Swift基础语法(一)
swift是一个基于objc进化过来的一个新的 OS X/IOS编程语言,而objc是基于c语言进化过来的一门编程语言.所以理论上说objc与c++是同一代产物并且objc与c++是相互独立的两套体系 ...
- shell中括号的使用
在这里我想说的是几种shell里的小括号,大括号结构和有括号的变量,命令的用法,如下: 1.${var} 2.$(cmd) 3.()和{} 4.${var:-string},${var:+string ...
- RocksDB笔记 - Compaction中的Iterator
Compaction中的Iterator 一般来说,Compaction的Input涉及两层数据的合并,对于涉及到的每一层数据: 如果是level-0,对level-0的每一个sstable文件建立一 ...
- 学习ES6--data1
在ES6之前,ES5没有块级作用域,没有继承,只有函数作用域,这些导致ES5会变量提升,和函数提升,例(如有错误,请指正): function test() { var name = 'test' t ...