Coursera Robotics系列课心得
Robotics Perception
Professor Kostas and Jianbo Shi
week 1: camera model
凸透镜成像原理:凸透镜焦点与焦距是固定的,这是物理性质。物距u、像距v、焦距f的关系为1/f=1/u+1/v
perspective drawing
bi-perspectograph construction changing
1. change the distance from the objects: OS
2. change the focal length: 两平行线之间的距离
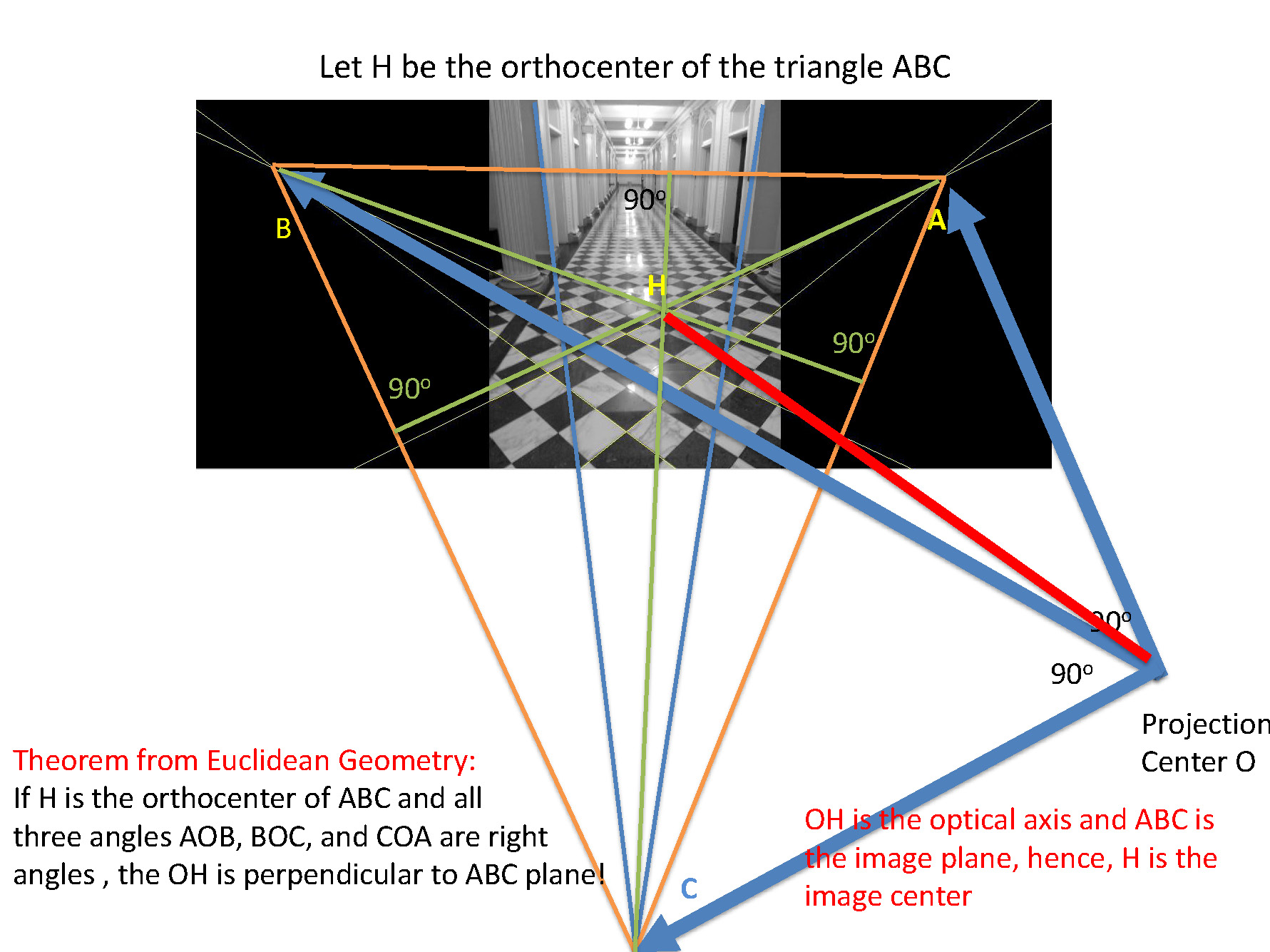
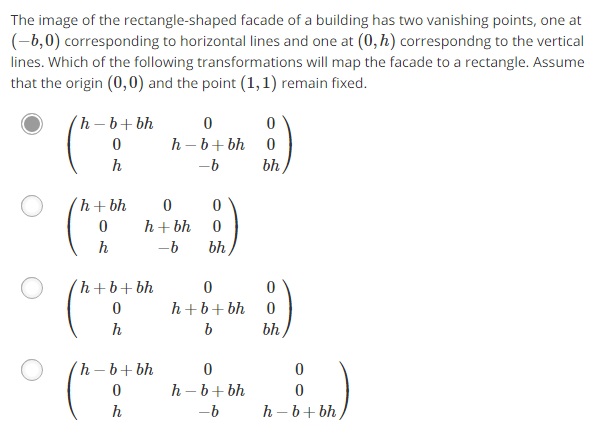
Vanishing points: 消灭点,所有消灭点的连线为horizon,辅助线为horizon lines
物理世界中平行线映射至图像坐标系中,产生的交点为消灭点
Vanishing points are intersection points of parallel lines.
Dolly Zoom
拉长物体离相机的距离,同时增大相机焦距
Perspective Transformation
world - camera - image
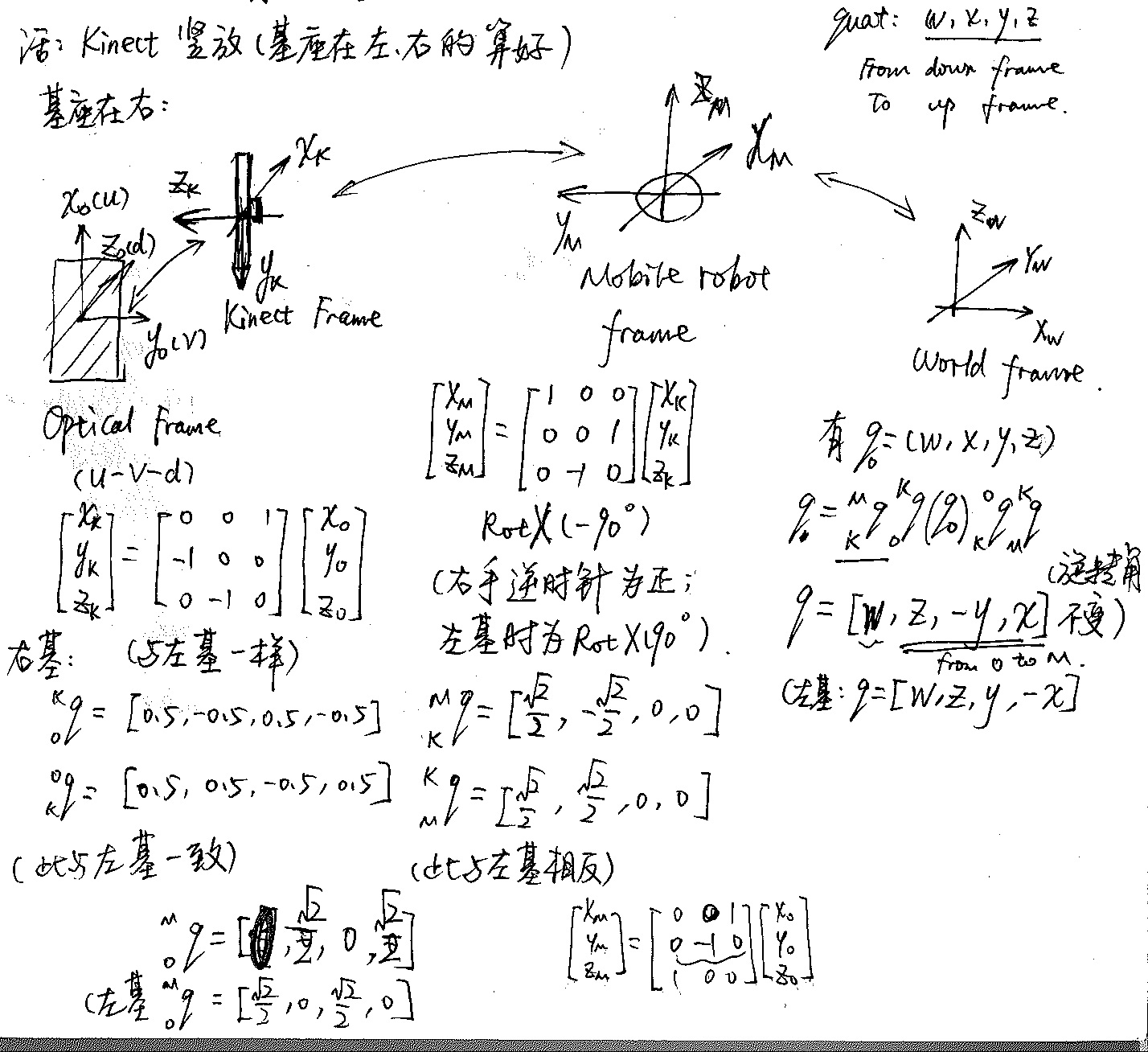
special cases:
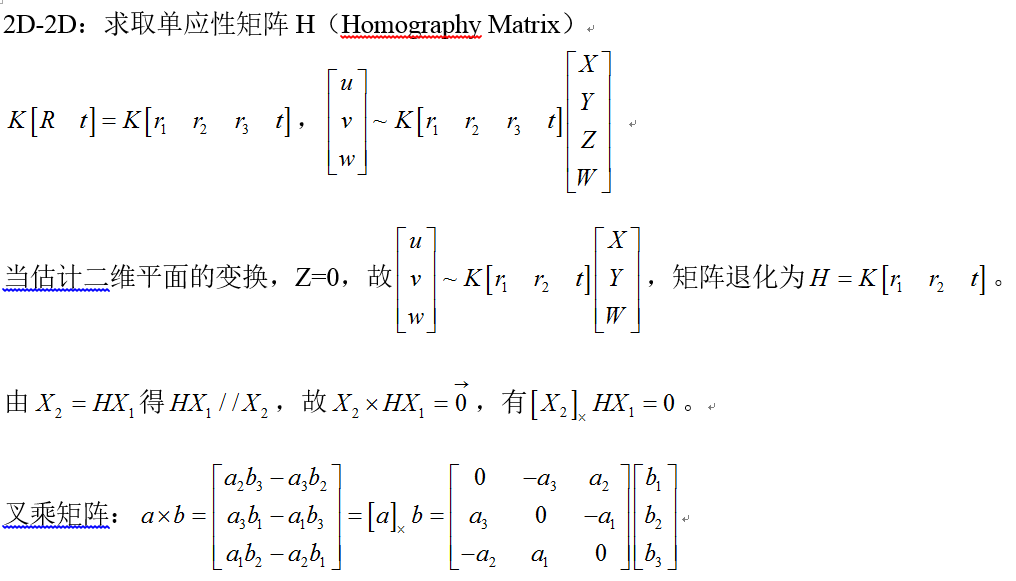
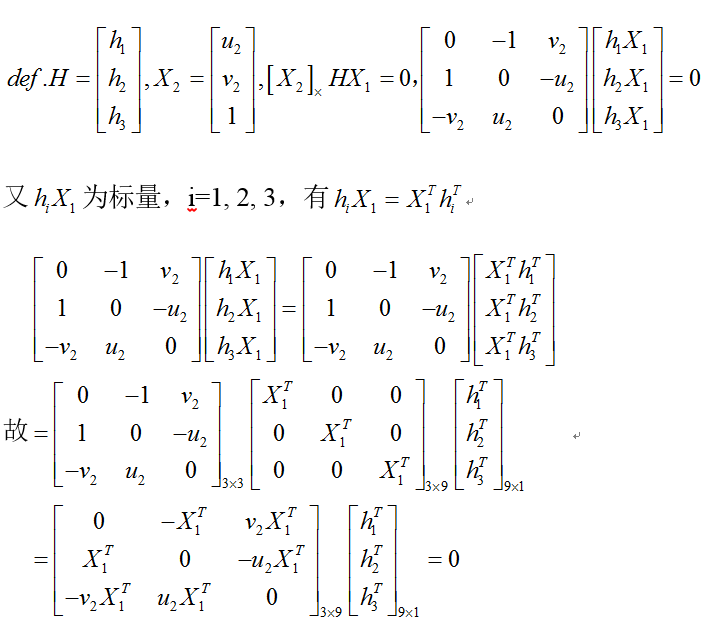
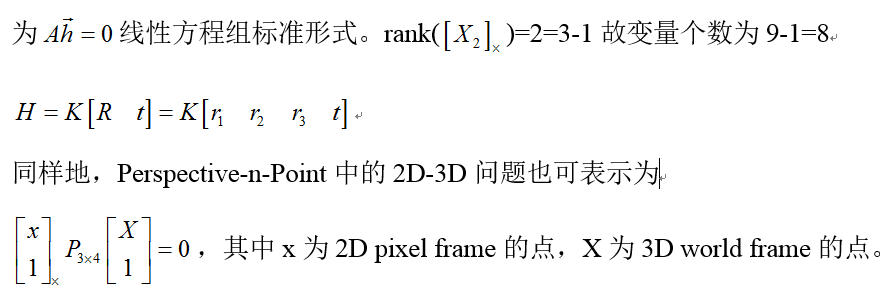
homography: 从3D世界平面(如Z=0)到2D图像平面,则K[R|t]可简约为单应性矩阵
only rotation: 纯旋转,t=0,此时齐次坐标最后的1不起作用。
Compute Intrinsics from Vanishing Points
Assignment
虽然coursera的编程作业一向风格是只写函数内容即可,但其MATLAB接口的含金量相当高,值得学习。
亮点有使用fill函数着色,使用project(本质上为3D-2D矩阵映射)
最后的问题求二元一次方程得到f和pos的公式。
Week 2: Projective Transformation
Vanishing points -- camera orientation
利用消灭点估计旋转矩阵:消灭点的向量
4个点估计projective transformation的application: Virtual Billboard
p'~Ap 为lambda*p'=Ap
Horizon:与projection plane的法向量正交,同时由image plane的vanishing point产生。
要想清楚vanishing point的定义。
Cross Ratios and Single View Metrology
cross ratio 交比、重比
Assignment
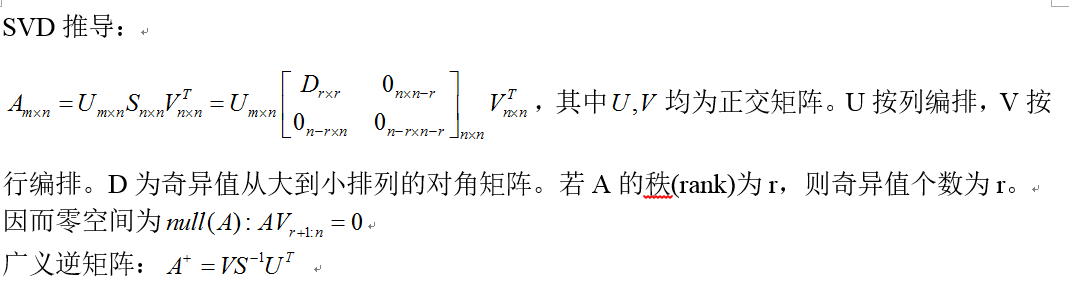
四对匹配点可求一个单应矩阵的理论推导如下:

原因:https://www.coursera.org/learn/robotics-perception/discussions/weeks/2/threads/lO9fEJ9kEeagbRJODex4yg
MATLAB计算SVD的矩阵中,V按列存储,而我们是按行定义。
inpolygon函数选择一个二维平面范围中多边形顶点内包含的所有点
meshgrid生成一个二维平面范围内的所有点坐标(遍历神器)
Week 3: Pose Estimation
Features
Scale Invariant:尺度不变性
DoG: Difference of Gaussian, calculated by multiple Laplace of Gaussian. 计算高斯核函数差
Laplacian Scale Space, depiction of high contrast value.如何生成?
Rotation Invariant:旋转不变性
Compute Image Gradient 计算图像梯度
descriptor: histogram of gradient orientation
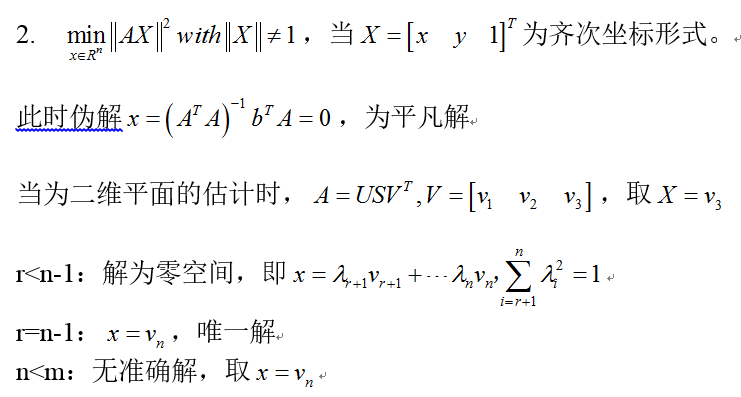
Singular Value Decomposition
例子:Mondrian色块图案
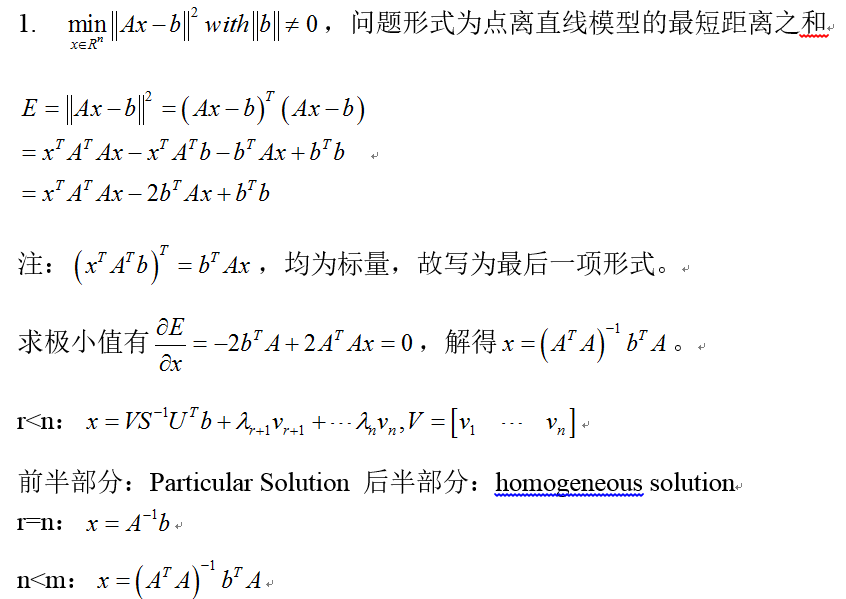
Least Square Estimation
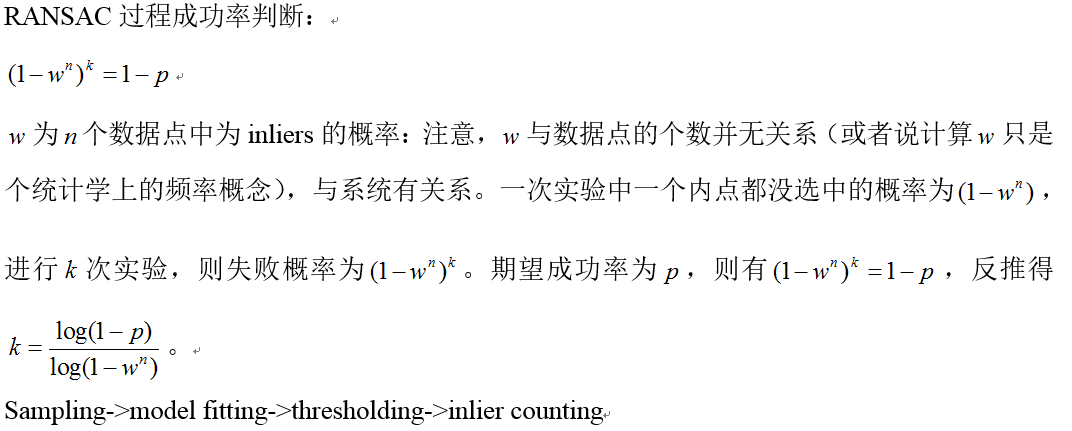
RANSAC
Pose Estimation
Week 4: Multi-View Geometry
https://en.wikipedia.org/wiki/Essential_matrix
It turns out, however, that only one of the four classes of solutions can be realized in practice. Given a pair of corresponding image coordinates, three of the solutions will always produce a 3D point which lies behind at least one of the two cameras and therefore cannot be seen. Only one of the four classes will consistently produce 3D points which are in front of both cameras. This must then be the correct solution. Still, however, it has an undetermined positive scaling related to the translation component.
估计到的结果只有1个是可行解。
Coursera Robotics系列课心得的更多相关文章
- coursera普林斯顿算法课part1里Programming Assignment 2最后的extra challenge
先附上challenge要求: 博主最近在刷coursera普林斯顿大学算法课part1部分的作业,Programming Assignment2最后的这个extra challenge当初想了一段时 ...
- 【课程汇总】OpenHarmony全场景Demo数字管家系列课(附链接)
小孩放学了,做作业的时间到,窗帘.护眼灯自动打开,关掉电视和扫地机,给小孩一个安静舒适的学习环境:碰到学习难题,可以随时请求你的远程指导:晚上回家休息了,选择舒适的氛围灯,伴随着睡眠音乐进入梦乡:出门 ...
- CODING 敏捷实战系列课第二讲:Scrum 敏捷项目管理核心要素之 3355
Scrum 是敏捷开发流派中最著名和最落地的一支,全球 70% 以上公司的敏捷转型都是以 Scrum 起步.CODING 特邀敏捷顾问.CST & CTC 认证敏捷教练申健老师将在本课程< ...
- CODING 敏捷实战系列课第三讲:可视化业务分析
业务分析处在开发过程的上游,提高业务分析的质量,可以减少后续开发.测试和集成过程中的反复确认,场景遗漏.采用可视化的业务分析工具箱可以大幅度避免文字版的业务需求描述所带来的不够完整,有误解等问题.CO ...
- CODING 敏捷实战系列课第四讲:从头搭建持续集成 DevOps 流水线
<从头搭建持续集成 DevOps 流水线>由资深敏捷教练.极限编程学院高级讲师.CODING 特邀敏捷顾问李小波老师主讲,将基于 CODING 展示如何编写 Jenkinsfile 搭建 ...
- CODING 敏捷实战系列课第五讲:敏捷中国史
敏捷软件开发方法自 2001 年传入中国以来,历经十多年的发展变迁,目前已经成为国内 IT 企业主流的研发管理方法.敏捷方法的传播和发展历程,是中国 IT 行业发展的剪影.CODING 特邀敏捷顾问. ...
- 对于coursera上三门北大网课的评测
今年暑假开始就选了coursera上三门北大的网课——C++程序设计.算法基础.数据结构基础,它们属于一个项目的,上的话每个月249块钱,项目里包括这三门一共有七门课.因为一开始是三门课同时上的,数据 ...
- 一些我推荐的和想上的网络课程(Coursera, edX, Udacity)
从面向找工作的角度出发,我觉得以下课程有很大帮助: 首推Robert Sedgewick,也是我觉得对我帮助最大的老师,讲课特点是能把复杂的算法讲解清楚(典型例子:红黑树,KMP算法) 他在Cours ...
- 【极客学院出品】Cocos2d-X系列课程之九-BOX2D物理引擎
Cocos2d-x 是时下最热门的手游引擎,在国内和国外手机游戏开发使用的份额各自是70%和25%,在App Store的top10中,有7个是用它开发的. 本节课程为Cocos2d-x系列课程之九, ...
随机推荐
- find命令:忽略一个目录或者多个目录
example: find ./ ! -path "./output/*" ! -path "./output1/*" -type f | xargs grep ...
- tesseract3.01的训练和使用
相关源码.资源下载:http://code.google.com/p/tesseract-ocr/downloads/list 训练步骤: 1. Generate Training Images:生 ...
- 谷歌Java编程规范
Google Java编程风格指南 January 20, 2014 作者:Hawstein 出处:http://hawstein.com/posts/google-java-style.html 声 ...
- Android之设置横屏竖屏
方案一:在AndroidManifest.xml中配置 在项目的AndroidManifest.xml中找到你所指定的activity中加上Android:screenOrientation属性,它有 ...
- Struts框架——(一)用Servlet + JSP演示Struts基本原理
一. 用Servlet + JSP演示Struts基本原理 struts是开源项目.它通过采用 Java Servlet/JSP 技术,实现了基于Java EE Web应用的MVC的应用框架.Stru ...
- ELK:kibana使用的lucene查询语法【转载】
kibana在ELK阵营中用来查询展示数据 elasticsearch构建在Lucene之上,过滤器语法和Lucene相同 全文搜索 在搜索栏输入login,会返回所有字段值中包含login的文档 使 ...
- mouseChildren启示
将aSprite的 mouseChildren 属性设置为 false ,可以实现mouseClick 事件的目标为 aSprite对象,而不是其子对象中的任一个.
- EF 连接MySQL 数据库 保存中文数据后乱码问题
EF 连接MySQL 数据库 保存中文数据后乱码问题 采用Code First 生成的数据库,MySQL数据库中,生成的表的编码格式为***** 发现这个问题后,全部手动改成UTF8(图是另一个表的 ...
- Miller_Rabin素数测试
#include<iostream> #include<cmath> #include<cstdio> #include<cstring> #inclu ...
- Send SqlParameter to Dapper
Question: I' using Dapper in my project. I have a list of SqlParameters and I want to send it to Dap ...