cv2.solvepnp 相机的位姿估计

cv2.solvePnP(objectPoints, imagePoints, cameraMatrix, distCoeffs[, rvec[, tvec[, useExtrinsicGuess[, flags]]]]) → retval, rvec, tvec
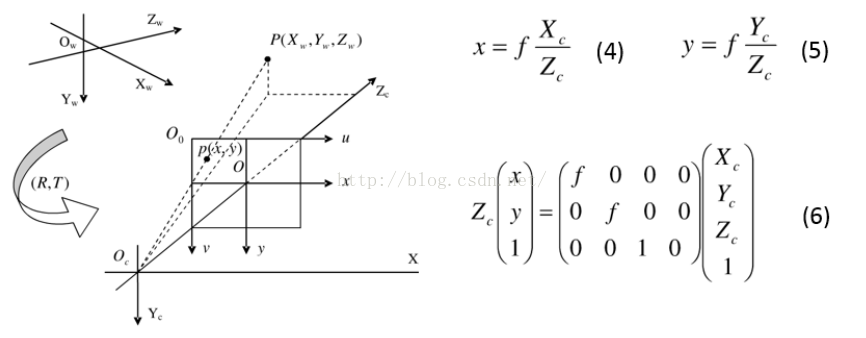
- objectPoints:世界坐标系中的3D点坐标,单位mm
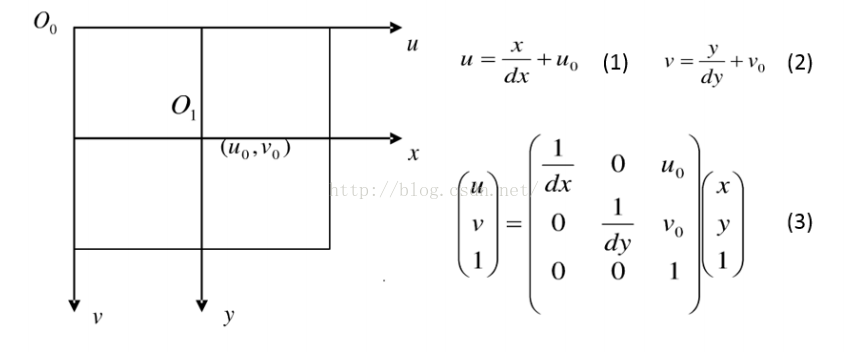
- imagePoints:图像坐标系中点的坐标,单位像素
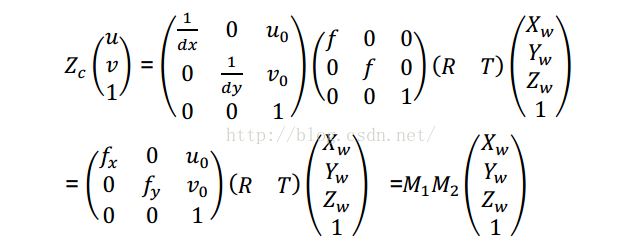
- cameraMatrix:相机内参矩阵
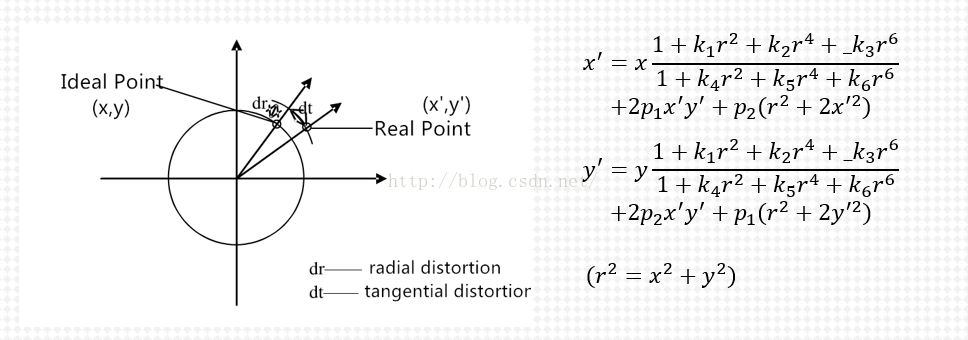
- distCoeffs:畸变系数
- rvec:旋转矩阵
- tvec:平移矩阵
- useExtrinsicGuess:是否输出平移矩阵和旋转矩阵,默认为false
- flags:SOLVEPNP _ITERATIVE、SOLVEPNP _P3P、SOLVEPNP _EPNP、SOLVEPNP _DLS、SOLVEPNP _UPNP
improt cv2 as cv import numpy as np objPoints = np.array([[],[],[]]) imgPoints = np.array([]) cameraMatrix = np.array() distCoeffs = np.array() retval,rvec,tvec = cv.solvePnP(objPoints,imgPoints,cameraMatrix,distCoeffs)
cv2.solvepnp 相机的位姿估计的更多相关文章
- python+opencv2相机位姿估计
最近在做基于图像的室内定位方面的研究,于是使用到了百度最新的室内数据库Image-based Localization (IBL) .由于该数据库给出的数据是每幅图像和其对应相机的内外参数和光心投影方 ...
- 相机位姿估计1_1:OpenCV:solvePnP二次封装与性能测试
关键词:OpenCV::solvePnP 文章类型:方法封装.测试 @Author:VShawn(singlex@foxmail.com) @Date:2016-11-27 @Lab: CvLab20 ...
- 相机位姿估计0:基本原理之如何解PNP问题
关键词:相机位姿估计 PNP问题求解 用途:各种位姿估计 文章类型:原理 @Author:VShawn(singlex@foxmail.com) @Date:2016-11-18 @Lab: CvLa ...
- 物体的三维识别与6D位姿估计:PPF系列论文介绍(三)
作者:仲夏夜之星 Date:2020-04-08 来源:物体的三维识别与6D位姿估计:PPF系列论文介绍(三) 文章“A Method for 6D Pose Estimation of Free-F ...
- 【转】【计算机视觉】opencv靶标相机姿态解算2 根据四个特征点估计相机姿态 及 实时位姿估计与三维重建相机姿态
https://blog.csdn.net/kyjl888/article/details/71305149
- 机器学习进阶-光流估计 1.cv2.goodFeaturesToTrack(找出光流估计所需要的角点) 2.cv2.calcOpticalFlowPyrLK(获得光流检测后的角点位置) 3.cv2.add(进行像素点的加和)
1.cv2.goodFeaturesToTrack(old_gray, mask=None, **feature_params) 用于获得光流估计所需要的角点参数说明:old_gray表示输入图片, ...
- 阅读高翔的RGBD-SLAM博文笔记
目录 高翔的RGBD-SLAM笔记 前端VO: 后端优化 高翔的RGBD-SLAM笔记 RGBD相机的特点: 使用RGBD相机中的深度这一维信息,以及相机的针孔成像模型,相机的内参,可以将二维点恢复成 ...
- ORB-SLAM2初步(跟踪模块)
一.跟踪模块简介 在ORB-SLAM或其他SLAM系统中,跟踪的主要任务是根据相机或视频输入的图像帧实时输出相机位姿.在ORB-SLAM中,跟踪模块的主要任务是实时输出相机位姿和筛选关键帧,完成一个没 ...
- CCF虚拟现实与可视化技术专委会丨面向增强现实的可视计算技术研究进展概述
https://mp.weixin.qq.com/s/I-rNwgXHEtwgdpkWzKtVXw 摘要 新一代增强现实技术需要依赖可视计算理论与方法解决大尺度复杂环境下的场景建模.内容生成.感知交互 ...
随机推荐
- hdu 3853 LOOPS (概率dp 逆推求期望)
题目链接 LOOPS Time Limit: 15000/5000 MS (Java/Others) Memory Limit: 125536/65536 K (Java/Others)Tota ...
- Servlet拦截匹配规则可以自已定义,拦截哪种URL合适?
Servlet拦截匹配规则可以自已定义,拦截哪种URL合适? 当映射为@RequestMapping("/user/add")时,为例: 1.拦截*.do.*.htm, 例如:/u ...
- ue4 tags 与 cast
父类设置tags,子类默认自动添加这个tags 子类可以强行删除父类的tags,这时如果把子类cast为父类,一样找不到这个tags 综上,要找到一个actor的tags,那么这个actor上就一定要 ...
- 洛谷P3182 [HAOI2016]放棋子
P3182 [HAOI2016]放棋子 题目描述 给你一个N*N的矩阵,每行有一个障碍,数据保证任意两个障碍不在同一行,任意两个障碍不在同一列,要求你在这个矩阵上放N枚棋子(障碍的位置不能放棋子),要 ...
- 洛谷P3190 [HNOI2007]神奇游乐园(插头dp)
传送门 大概是算第一道自己做出来的插头dp? (虽然都是照着抄板子的) (虽然有个地方死活没调出来最后只能看题解才发现自己错在哪里的) 我就当你们都会插头dp了…… 因为必须得是一条路径,所以扫描线上 ...
- sesstionStorage和localStorage
使用: 对于多页面的pc端,为了同步多页面的消息提醒,可以将数据储存在localStorage中,多页面共享同一个localStorage.然后使用setInterval轮询获取数据,执行逻辑代码 s ...
- 基于.NetCore2.1。服务类库采用.Net Standard2.0,兼容.net 4.6.1消息推送服务
基于.NetCore2.1.服务类库采用.Net Standard2.0,兼容.net 4.6.1消息推送服务 https://www.cnblogs.com/ibeisha/p/weixinServ ...
- 转 如何观察 undo Oracle DML语句回滚开销估算
https://searchdatabase.techtarget.com.cn/7-20392/ --use_urec 详细解读: select USED_UREC from v$transacti ...
- TVS选型
与保护器件并联使用的电压型保护器件,速度快,冲击脉冲功率高.正常高阻抗,超过击穿电压后导通将两端电压钳位在VC(即被保护的电压级别) 命名规则SMAJ/BJ/CJ/DJ分别表示不同的脉冲功率为400W ...
- es6新语法系列,查找字符串,模板字符串
一.模板字符串: ES6引入了一种新型的字符串字面量语法,我们称之为模板字符串(template strings).除了使用反撇号字符 ` 代替普通字符串的引号 ' 或 " 外,它们看起来与 ...