Acquistion Location Confidence for accurate object detection
Acquistion Location Confidence for accurate object detection
本论文主要是解决一下两个问题:
1、分类得分高的预测框与IOU不匹配,(我猜应该是训练数据集导致的)
2、基于回归的边框修正是非单调的,缺乏可解释性。
贡献点
- IoU-guided NMS
- Optimization refine
- PRpooling
1、IoU-guided NMS

(1)传统 NMS : 根据边界框的分类置信度排序,每次选择cls score最大的框,并对与它IoU大于阈值的框抑制。定位准确的边界框中有很大一部分会被错误抑制,这是由分类置信度和定位准确度之间的不匹配造成的,
(2)IoU-NMS : 使用预测得到的IoU来对预测框进行排序,每次选择IoU最大的框并对与它IoU大于一定阈值的框抑制。
(3)soft-NMS:NMS基础上,IoU 大于阈值的框不将其分类置信度置为0。
为了使用IoU来指导排序,但在在测试的时候没有GroundTruth信息,于是设计一个网络来
估计边框与GroundTruth的IoU。如下图所示。

虚线框的是IoU-Net。
输入:Jittered-RoIs:通过对groundtruth 随机变换得到一系列的候选框(而不采用RPN输出的RoIs)
损失:smooth-L1 LOSS
输出:候选框与GroundTruth的IoU交并比(用于后续的IoU-guided NMS和优化修正算法)
2、提出的PrPooling代替了原来的RoI pooling
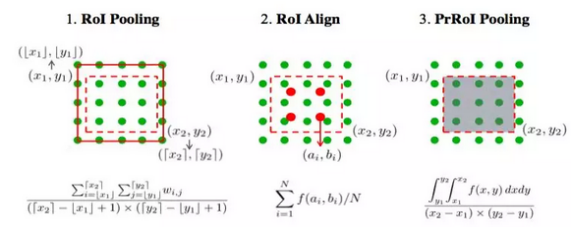
因为RPN网络输出的bounding box的坐标是浮点数,
- RoI Pooling:有量化误差
- RoI Align:不用量化,利用双线性插值计算出对应点的特征值。 但N=4固定,ROI大小不固定。
- PrRoI Pooling:利用双线性插值计算出对应点的特征值,该函数连续可导,有益于后续的基于优化的边框修正。
论文中的不足之处,缺少PrRoI-pooling的对照实验。在Mask-RCNN中的RoIAlign的精度相对于RoIPool明显提高。
The code is released at: https://github.com/vacancy/PreciseRoIPooling
3、基于优化的边框修正
问题:
基于回归的边界框精修非单调,对输入的分布变化敏感,不同的预测框迭代次数没法自适应。
解决方法:
通过每次修正得到的边界框预测得到IoU来修正。
基于优化的算法部分:
每次迭代对不同的预测框都做一次修正,因为PrRoI-Pool是连续可导的,所以通过梯度上升的方式进行优化,计算出边界框的变换。当变换后的边界框送入IoU-Net得到新的IoU与旧的IoU区别小于一定值或者出现退化,该边界框就不在修正。
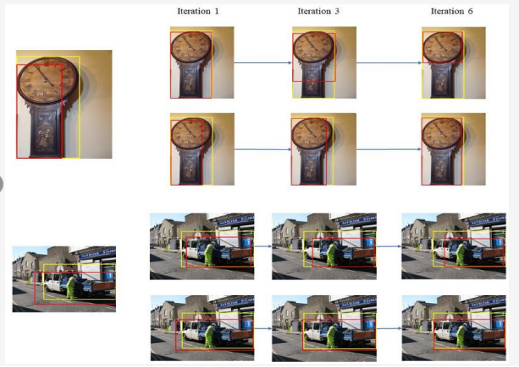
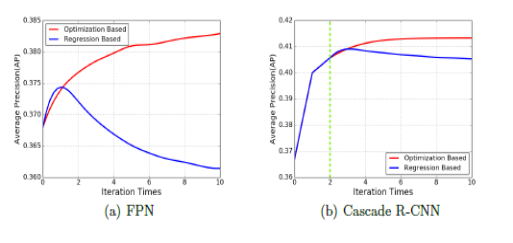
基于回归的方法:如图第一排随着迭代次数的增加,红色的预测越来越偏离GroundTruth
基于优化的方法:如图第二排随着迭代次数增加,预测框越来越精确。
4、实验细节
(1)数据集:
80类别的MS-COCO 80k张训练图像和35k张验证图像,5k张验证图像做测试。
(2)训练参数设置:
输入图像裁剪为1200*800的大小
IoU-Net的训练数据是另外产生的。对于IoU-Net的 IoU标签通过正则化变为【-1,1】之间。
每层的参数设置为mean=0,标准差=0.01或0.001的高斯分布,batchsize大小为16,在推理部分,先还是使用了一次边框回归来初始化坐标,为了加快推理,对所有检测框做IoU -NMS前100个最大分类置信度的边框再使用基于优化的算法进行微调。
5、实验结果比较
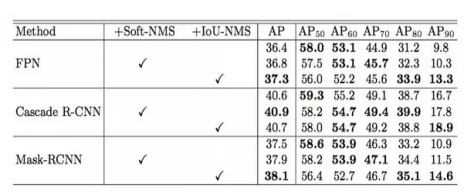
相比于soft-NMS,采用了IoU-NMS的结果在AP90上明显提高了。
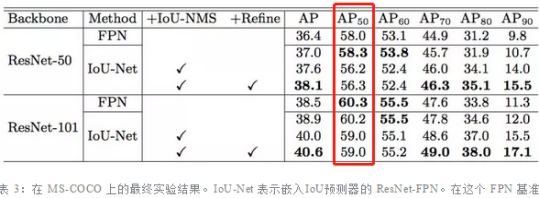
问题:AP50的结果较差。
问题原因:因为较小的IoU的框与GroundTruth的特征差异大,导致了IoU预测器不精确,修正也退化了。
解决方法:通过采集更多小IoU的来训练就可以解决
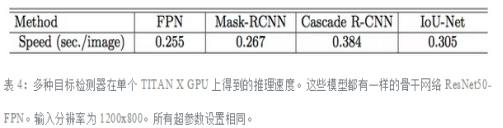
IoU-Net相较于FPN、Mask-RCNN速度下降了一点,但精度有所提升,时间耗费应该主要是在基于优化的边框修正上
Acquistion Location Confidence for accurate object detection的更多相关文章
- [论文理解] Acquisition of Localization Confidence for Accurate Object Detection
Acquisition of Localization Confidence for Accurate Object Detection Intro 目标检测领域的问题有很多,本文的作者捕捉到了这样一 ...
- 目标检测--Rich feature hierarchies for accurate object detection and semantic segmentation(CVPR 2014)
Rich feature hierarchies for accurate object detection and semantic segmentation 作者: Ross Girshick J ...
- 论文笔记:Rich feature hierarchies for accurate object detection and semantic segmentation
在上计算机视觉这门课的时候,老师曾经留过一个作业:识别一张 A4 纸上的手写数字.按照传统的做法,这种手写体或者验证码识别的项目,都是按照定位+分割+识别的套路.但凡上网搜一下,就能找到一堆识别的教程 ...
- 目标检测系列 --- RCNN: Rich feature hierarchies for accurate object detection and semantic segmentation Tech report
目标检测系列 --- RCNN: Rich feature hierarchies for accurate object detection and semantic segmentation Te ...
- [论文理解]Region-Based Convolutional Networks for Accurate Object Detection and Segmentation
Region-Based Convolutional Networks for Accurate Object Detection and Segmentation 概括 这是一篇2016年的目标检测 ...
- 2 - Rich feature hierarchies for accurate object detection and semantic segmentation(阅读翻译)
Rich feature hierarchies for accurate object detection and semantic segmentation Ross Girshick Jeff ...
- 深度学习论文翻译解析(八):Rich feature hierarchies for accurate object detection and semantic segmentation
论文标题:Rich feature hierarchies for accurate object detection and semantic segmentation 标题翻译:丰富的特征层次结构 ...
- 论文阅读笔记四十八:Bounding Box Regression with Uncertainty for Accurate Object Detection(CVPR2019)
论文原址:https://arxiv.org/pdf/1809.08545.pdf github:https://github.com/yihui-he/KL-Loss 摘要 大规模的目标检测数据集在 ...
- 目标检测(一)RCNN--Rich feature hierarchies for accurate object detection and semantic segmentation(v5)
作者:Ross Girshick,Jeff Donahue,Trevor Darrell,Jitendra Malik 该论文提出了一种简单且可扩展的检测算法,在VOC2012数据集上取得的mAP比当 ...
随机推荐
- Redis(十三)Python客户端redis-py
一.安装redis-py的方法 使用pip install安装redis-py C:\Users\BigJun>pip3 install redis Collecting redis Downl ...
- 面向对象的7个设计原则->开车理解->贴近生活
设计模式在我们的开发中是不可或缺的一部分,很多人会说,我没用那些设计模式啊,我也开发的挺好的,其实不然,我们在开发中都用到了这些设计模式,只不过我们并没有在意这些,今天我就用开车的方法来解释一下我们的 ...
- docker 和 FastDFS上传和下载文件
1,从仓库拉取镜像 sudo docker image pull delron/fastdfs 也可以解压已经打包好的镜像文件 $ sudo docker load -i 文件路径/fastdfs_d ...
- C# 倒计时,显示天,时,分,秒。时间可以是从数据库捞出来
从数据库把时间读出来,接着 你用个timer控件启用控件,设置1000毫秒timer时间里 用当前时间-你取出的时间 就可以了 DateTime furtime = Convert.ToDateTim ...
- Apache Tomcat服务部署网站
Tomcat是Apache软件基金会 (Apache Software Foundation)的Jakarta项目中的一个核心项目,由Apache.Sun 和其他一些公司及个人共同开发而成.由于有了S ...
- 【IOS开发—视图】
一.UIWindow对象 每一个app都有一个UIWindow对象,它像一个容器一样,用来包含应用中的所有视图,应用会在启动时创建并设置UIWindow对象. - (BOOL)application: ...
- js取两位小数点
var money = one.money; var tmoney = money.substr(0,money.indexOf(".")+3);
- Java学习总结之基本数据类型
Java的数据类型分为基本数据类型和引用数据类型, 今天总结的是基本数据类型.在Java中,一共有八种基本数据类型,分别为整数类型(byte,short,int,long).浮点类型(float,do ...
- wordpress插件:multiple post thumbnails(可为文章添加多个特色图片)
我们经常会给wordpress的文章加上特色图片来实现日志缩略图的需求,但是很多时候一张图片并不能够完美而又全面的表达我们wordpress文章的内容,这时候您可能就会需要这样一个能让wordpres ...
- My Android 学习之旅--开始
其实,很早就想写写博客了,一直懒到现在. 学习android也不是今天才开始的,大概在2月份过完年之后就开始了,买了我认为还可以的书<Android从入门到精通>,花了不到一个月的时间,把 ...