Android Hook框架adbi的分析(2)--- inline Hook的实现
本文博客地址:http://blog.csdn.net/qq1084283172/article/details/74452308
一、 Android Hook框架adbi源码中inline Hook实现部分的代码结构
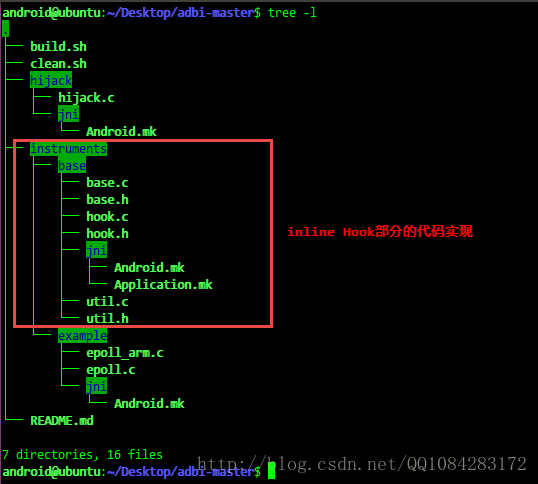
Android Hook框架adbi源码中inline Hook部分的实现代码结构示意图如下所示,hijack代码部分是前面的博客中提到的root下Android跨进程注入so的注入工具,instruments\base代码部分为inline Hook的操作实现,instruments\example代码部分则为Android Hook框架adbi实现Hook系统调用函数epoll_wait的使用例子。
二、 adbi源码中inline Hook实现的详细步骤分析
1 .inline Hook函数被调用的时机
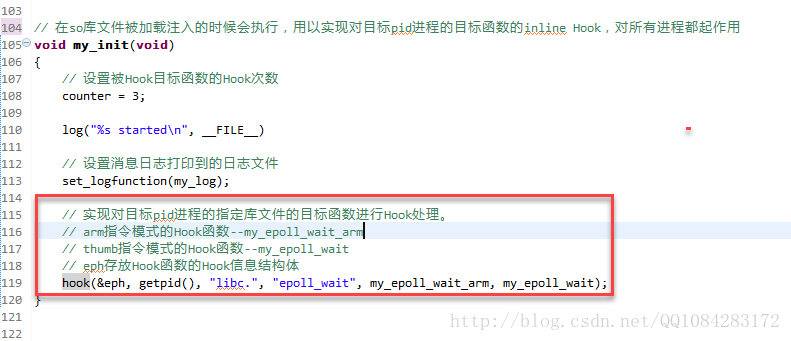
在so库文件加载的时候,会首先执行.init段的构造函数,因此在编写注入到Android目标进程中的so库文件时要定义该构造函数并实现在此处调用inline Hook。inline Hook实现就是在so库文件注入到Android进程中被加载调用该构造函数时被执行的。Android Hook框架adbi基于模块化的设计思想,该构造函数的编写是放在自定义Hook函数的接口中来实现的,在这里就是在Hook函数代码示例instruments\example\epoll.c中定义和实现的。

2 .inline Hook操作的Hook函数实现
inline Hook操作的Hook函数是在adbi\instruments\base\hook.c中实现的,在Hook目标pid进程的目标函数时,定义了一个全局的静态变量,保存被Hook目标函数相关的信息,用以对目标函数的Hook操作和函数还原,具体的结构定义如下:
struct hook_t {
// arm指令模式的12字节Hook
unsigned int jump[3]; /* 要修改的hook指令(Arm) */
unsigned int store[3]; /* 被修改的原指令(Arm) */
// thumb指令模式的20字节Hook
unsigned char jumpt[20]; /* 要修改的hook指令(Thumb) */
unsigned char storet[20]; /* 被修改的源指令(Thumb) */
unsigned int orig; /* 被hook的目标函数地址 */
unsigned int patch; /* hook的自定义函数地址 */
unsigned char thumb; /* 表明被hook函数使用的指令集,1为Thumb,0为Arm */
unsigned char name[128]; /* 被hook的函数名 */
// 用于存放其他的数据(未使用)
void *data;
};在对目标进程的目标函数进行Hook之前,使用hijack注入工具中查找mprotect函数调用地址的方法,获取被Hook目标函数的调用地址,具体就是通过解析目标函数所在的so库文件中的“.symtab”或者“.dynsym”节,获取到库中所有的符号信息,查找得到目标函数的调用地址的RVA,加上目标函数所在so库文件的加载基地址就是目标函数的调用地址VA了。
// 对目标pid进程的指定函数进行Hook处理
// h为记录Hook信息的静态变量的指针,pid为被Hook的目标进程的pid,libname为被Hook函数所在的so库文件名称,
// funcname为被Hook的目标函数,hook_arm为被Hook的函数的arm指令模式的替换函数,hook_thumb为被Hook的函数的thumb指令模式的替换函数
int hook(struct hook_t *h, int pid, char *libname, char *funcname, void *hook_arm, void *hook_thumb)
{
unsigned long int addr;
int i;
// 在指定pid进程的指定so库中查找将被Hook的目标函数funcname的调用地址VA即addr
if (find_name(pid, funcname, libname, &addr) < 0) {
log("can't find funcname: %s\n", funcname)
return 0;
}
log("hooking: %s = 0x%lx ", funcname, addr)
// 保存被Hook的目标函数的名称
strncpy(h->name, funcname, sizeof(h->name)-1);Arm处理器支持两种指令集,一是基本的Arm指令集,二是Thumb指令集。因此,为了正确的Hook目标函数,不至于导致被Hook的Android进程崩溃,在Hook目标进程的目标函数之前还需要判断进程当前所处的arm指令模式。判断的方法是看函数跳转地址的最后两位是不是全0,如果是,那就是Arm模式的指令,如果最后两位不全为0,那就是Thumb模式的指令。由于Hook目标函数时的跳转指令需要4字节对齐,所以对目标函数调用地址进行4字节取模来判断执行的指令集。
Arm与Thumb之间的状态切换是通过专用的跳转交换指令BX来实现。BX指令以通用寄存器(R0~R15)为操作数,通过拷贝Rn到PC实现绝对跳转。BX利用Rn寄存器中目的地址值的最后一位判断跳转后的状态,如果为“1”表示跳转到Thumb指令集的函数中,如果为“0”表示跳转到Arm指令集的函数中。而Arm指令集的每条指令是32位,即4个字节,也就是说Arm指令的地址肯定是4的倍数,最后两位必定为“00”。所以,直接就可以将从符号表中获得的调用地址模4,看是否为0来判断要修改的函数是用Arm指令集还是Thumb指令集。
上面这段解释说明引用自博主Roland_Sun的博文Android平台下hook框架adbi的研究(下),特地摘抄过来帮助分析和理解。
// 通过判断函数跳转地址的最后两位是不是全0,来判断指令的运行模式,
// 如果后两位全是的0,那就一定是用Arm指令,如果后两位不全为0,那一定是用Thumb指令集
if (addr % 4 == 0)
{
// Arm指令模式的HooK目标函数的处理
······
}
else
{
// Thumb指令模式的Hook目标函数的处理
······
}Arm指令模式HooK目标函数的处理是通过12字节指令覆盖来完成的,简单的来说就是将目标函数调用地址处的前12字节的指令先保存起来,然后使用12字节的Hook跳转指令进行覆盖。
Arm指令模式下Hook目标函数的处理,先将自定义hook函数和要被hook目标函数的地址保存起来。然后生成hook的代码指令,只有3个4字节就是12个字节,第一个dword字节是代码指令“LDR pc, [pc, #0]”,由于pc寄存器读出的值实际上是当前指令地址加8,所以这里是把jump[2]的值加载进pc寄存器中,而jump[2]处保存的是自定义hook函数的地址。因此,jump[0~3]实际上保存的是跳转到自定义hook函数的代码指令。再下面,将被hook函数的前3个4字节保存下来,方便后面函数的恢复。最后,将跳转指令写到被hook目标函数的前12字节。这样以后,当要调用被hook函数的时候,实际执行的指令就是跳转到自定义hook函数处。
// Arm指令模式的HooK目标函数的处理
if (addr % 4 == 0) {
log("ARM using 0x%lx\n", (unsigned long)hook_arm)
// arm指令模式
h->thumb = 0;
// 自己实现的Hook函数地址
h->patch = (unsigned int)hook_arm;
// 被Hook目标函数的原函数地址
h->orig = addr;
// 用于Hook目标函数的调用地址为新地址hook_arm
h->jump[0] = 0xe59ff000; // LDR pc, [pc, #0]
h->jump[1] = h->patch;
// pc寄存器读出的值实际上是当前指令地址加8
// 把jump[2]的值加载进pc寄存器
h->jump[2] = h->patch;
// 保存原目标函数的12字节指令,用于函数的恢复
for (i = 0; i < 3; i++)
h->store[i] = ((int*)h->orig)[i];
// 覆盖目标函数的12字节指令为Hook函数指令,实现对目标函数的Hook
for (i = 0; i < 3; i++)
((int*)h->orig)[i] = h->jump[i];
}Thumb指令模式下Hook目标函数的处理方式和arm模式下的Hook处理一样,但是基于thumb指令的长度不同,在对目标函数代码指令的覆盖上有所不同,Thumb指令模式下Hook目标函数需要20字节的Hook指令,Hook目标函数的操作是先保存目标函数的前20字节的指令,然后使用20个字节的Hook指令对目标函数进行覆盖处理。
// Thumb指令模式的Hook目标函数的处理
else {
// 对自定义Hook函数的调用地址进行指令模式的判断
if ((unsigned long int)hook_thumb % 4 == 0)
log("warning hook is not thumb 0x%lx\n", (unsigned long)hook_thumb)
// thumb指令模式
h->thumb = 1;
log("THUMB using 0x%lx\n", (unsigned long)hook_thumb)
// 保存用于Hook目标函数的调用地址为新地址hook_thumb
h->patch = (unsigned int)hook_thumb;
// 保存被Hook目标函数的原函数地址
h->orig = addr;
// 保存寄存器r5,r6的值用于恢复环境(r6在高地址,r5在地址)
h->jumpt[1] = 0xb4;
h->jumpt[0] = 0x60; // push {r5,r6}
// 将PC寄存器的值加上12赋值给r5。加上的立即数必须是4的倍数,而加上8又不够,只能加12。
// 这样的话,读出的PC寄存器的值是当前指令地址加上4,再加上12的话,那么可以算出来r5寄存器的值实际指向的是jumpt[18],而不是jumpt[16]了。
// 这里还有一点需要注意,对于Thumb的“Add Rd, Rp, #expr”指令来说,如果Rp是PC寄存器的话,那么PC寄存器读出的值应该是(当前指令地址+4)& 0xFFFFFFFC,
// 也就是去掉最后两位,算下来正好可以减去2。但这里也有个假设,就是被hook函数的起始地址必须是4字节对齐的,哪怕被hook函数是使用Thumb指令集编写的。
h->jumpt[3] = 0xa5;
h->jumpt[2] = 0x03; // add r5, pc, #12 (比较难理解)
// 将保存在jumpt[16]处的hook函数地址加载到r5寄存器中
h->jumpt[5] = 0x68;
h->jumpt[4] = 0x2d; // ldr r5, [r5]
// 降低栈顶,恢复到初始的状态,释放内存空间
h->jumpt[7] = 0xb0;
h->jumpt[6] = 0x02; // add sp,sp,#8
// 用保存的自定义hook函数地址覆盖原来压入的r6的值,r5的值暂时不受影响
h->jumpt[9] = 0xb4;
h->jumpt[8] = 0x20; // push {r5}
// 抬高栈顶,r5的值被保护
h->jumpt[11] = 0xb0;
h->jumpt[10] = 0x81; // sub sp,sp,#4
// 进行出栈操作,pc寄存器得到自定义的Hook函数的地址,r5的值还是原来的
h->jumpt[13] = 0xbd;
h->jumpt[12] = 0x20; // pop {r5, pc}
// 仅仅用于4字节对齐的填充,只是因为前面的add指令只能加4的倍数
h->jumpt[15] = 0x46;
h->jumpt[14] = 0xaf; // mov pc, r5 ; just to pad to 4 byte boundary
// 用于存放自定义Hook函数的调用地址(4字节)
memcpy(&h->jumpt[16], (unsigned char*)&h->patch, sizeof(unsigned int));
// sub 1 to get real address,获取到thumb指令模式下函数的真实调用地址
unsigned int orig = addr - 1;
// 保存被Hook目标函数的原始thumb指令
for (i = 0; i < 20; i++) {
h->storet[i] = ((unsigned char*)orig)[i];
//log("%0.2x ", h->storet[i])
}
//log("\n")
// 覆盖被Hook目标函数的指令为自定义的Hook函数指令
for (i = 0; i < 20; i++) {
((unsigned char*)orig)[i] = h->jumpt[i];
//log("%0.2x ", ((unsigned char*)orig)[i])
}
}Thumb指令模式下Hook目标函数的Hook指令比较难理解,当初也是思考了好久才想明白了一些,主要参考的也是博主Roland_Sun的解释和分析。知道自己很多地方说不清楚,因此有关Thumb指令模式下Hook指令的理解就借用博主Roland_Sun的理解,在此分析基础上进行修改帮助理解。
和对Arm指令集的处理非常相似,只不过跳转指令换成了Thumb。和Arm的处理不同,这里是通过pop指令来修改PC寄存器的值实现函数的Hook跳转操作。
1.首先,入栈r6和r5寄存器的值,并在arm指令操作中寄存器编号大在栈的高地址编号小在栈的低地址,将r5压栈是因为后面的指令执行修改了r5寄存器的值,压栈后方便以后恢复,而将r6寄存器压栈纯粹是为了要保留一个位置。
2.接着,将PC寄存器的值加上12赋值给r5,加上的立即数必须是4的倍数,而加上8又不够,只能加12。这样的话,读出的PC寄存器的值是当前指令地址加上4,再加上12的话,那么可以算出来r5寄存器的值实际指向的是jumpt[18],而不是jumpt[16]了。
3.这里还有一点需要注意,对于Thumb模式下的“Add Rd, Rp, #expr”指令来说,如果Rp是PC寄存器的话,那么PC寄存器读出的值应该是(当前指令地址+4)& 0xFFFFFFFC,也就是去掉最后两位,算下来正好可以减去2。但这里也有个假设,就是被hook函数的起始地址必须是4字节对齐的,哪怕被hook函数使用Thumb指令集编写的。
4.再下面的指令目的就是将保存在jumpt[16]处的自定义hook函数地址覆盖r6寄存器在栈中的值,栈中r5寄存器的值不受影响,仅仅用于后面寄存器环境的恢复。所以,下面的“pop {r5, pc}”指令刚好可以完成恢复r5寄存器并且修改PC寄存器的值,从而实现跳转到自定义hook函数地址处执行。
5.接下来的指令(从jumpt[14])完全是多余的了,完全不会执行到,只是因为前面的add指令只能加4字节的倍数。最后,还有一点不同的是,因为被hook函数是Thumb指令集,所以其真正的内存映射地址是其符号地址减去1。
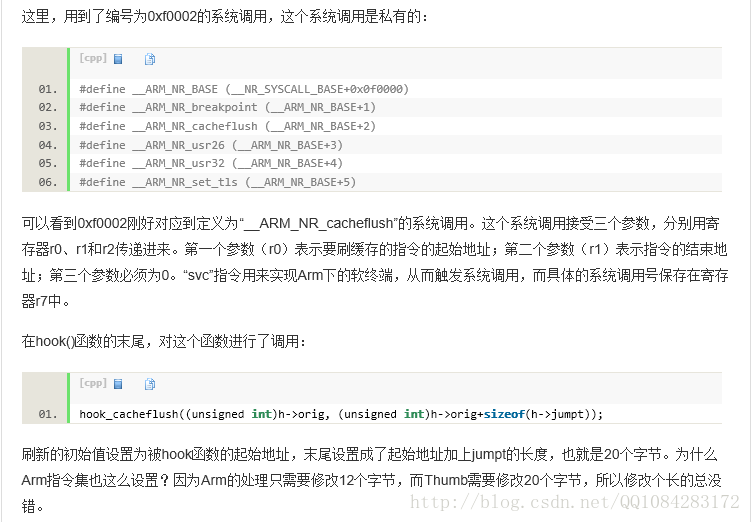
Hook操作覆盖目标函数的代码指令以后还需要刷新指令缓存。现代的处理器都有指令缓存,用来提高代码指令的执行效率,ARM处理器也一样也有指令缓存机制。虽然目标进程内存中被Hook目标函数的代码指令已经改变,但是cache中的代码指令可能仍为原有的代码指令,再进行代码指令执行时还是优先执行缓存中的代码指令,使得被Hook目标函数修改的指令得不到执行,所以需要手动刷新cache中的代码指令,解决的方法是触发Android系统隐藏刷新cache的系统调用。
// 调用Android系统的私有系统调用__ARM_NR_cacheflush实现缓存指令的刷新
void inline hook_cacheflush(unsigned int begin, unsigned int end)
{
const int syscall = 0xf0002;
// 禁止编译器对汇编指令进行指令优化
__asm __volatile (
"mov r0, %0\n"
"mov r1, %1\n"
"mov r7, %2\n"
"mov r2, #0x0\n"
"svc 0x00000000\n"
:
: "r" (begin), "r" (end), "r" (syscall) // 输入列表
: "r0", "r1", "r7" // 修改寄存器列表
);
}
对目标函数进行Hook操作的时候还需要考虑对目标函数Hook的恢复还原和再次对目标函数进行Hook操作的处理。adbi的源码文件adbi\instruments\base\hook.c中,hook_precall函数就是对目标函数进行Hook后的恢复还原,hook_postcall函数就是对目标函数进行恢复还原之后的再次Hook操作。
// 进行thumb或者arm模式被Hook目标函数指令的恢复即实现函数Hook的恢复
void hook_precall(struct hook_t *h)
{
int i;
// thumb指令模式被Hook目标函数的指令的恢复
if (h->thumb) {
// 获取被Hook目标函数的真实调用地址
unsigned int orig = h->orig - 1;
// 进行thumb指令模式被Hook指令的恢复
for (i = 0; i < 20; i++) {
((unsigned char*)orig)[i] = h->storet[i];
}
} else {
// 进行arm指令模式被Hook指令的恢复
for (i = 0; i < 3; i++){
((int*)h->orig)[i] = h->store[i];
}
}
// 刷新指令缓存
hook_cacheflush((unsigned int)h->orig, (unsigned int)h->orig+sizeof(h->jumpt));
}// 进行thumb或者arm指令模式Hook目标函数的指令覆盖即实现函数的Hook
void hook_postcall(struct hook_t *h)
{
int i;
if (h->thumb) {
// 获取thumb指令模式函数真实的调用地址
unsigned int orig = h->orig - 1;
// 进行thumb指令模式Hook目标函数指令的覆盖
for (i = 0; i < 20; i++)
((unsigned char*)orig)[i] = h->jumpt[i];
} else {
// 进行arm指令模式Hook目标函数指令的覆盖
for (i = 0; i < 3; i++)
((int*)h->orig)[i] = h->jump[i];
}
// 刷新指令缓存
hook_cacheflush((unsigned int)h->orig, (unsigned int)h->orig+sizeof(h->jumpt));
}3 .自定义Hook函数Thumb模式和Arm模式的实现
很显然,在上面的分析中提到的Hook目标函数实现操作中需要提供Thumb模式和Arm模式的自定义Hook函数的实现。在我们进行Hook目标函数的操作中并不知道要被Hook的目标函数是那种模式的指令集,只能通过被Hook目标函数的调用地址来判断,因此需要提供Thumb模式和Arm模式的自定义Hook函数的实现。那么,如何控制将代码编译成Arm指令集还是是Thumb指令集呢?
Android NDK默认情况下将C代码编译成Thumb指令,如果想将C代码编译成Arm指令集,有两种方法:
1.在Android.mk文件中添加上“LOCAL_ARM_MODE := arm”,这样会默认将所有的C代码编译成Arm指令集。
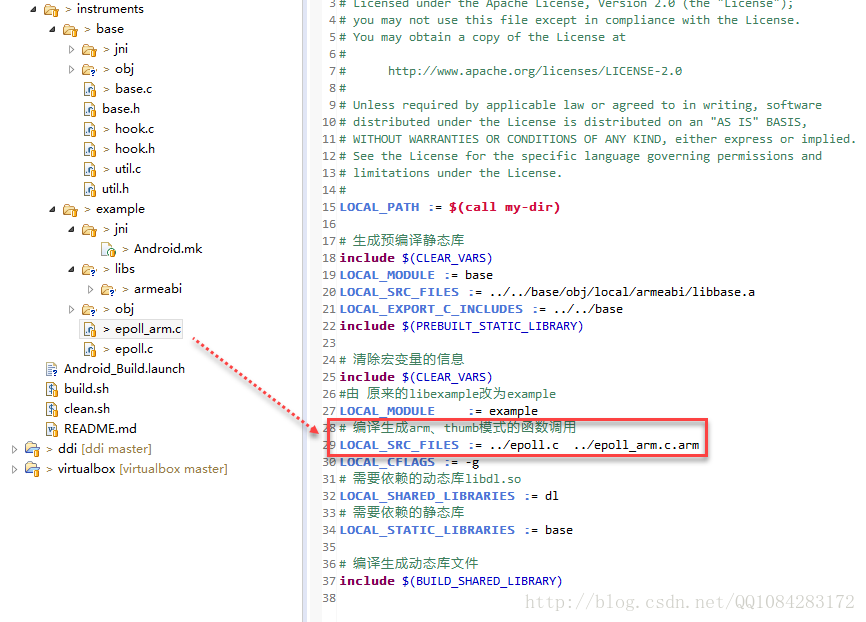
2.前面的方法只能将所有代码全部编译成Arm指令集,如果想一部分代码编译成Arm,一部分编译成Thumb就力不从心了。想要达到这个目的,可以将那些你想编译成Arm指令集的C代码文件名字后面加上一个“.arm”后缀。而其它的没有加上“.arm”后缀的C文件将使用“LOCAL_ARM_MODE”指定的指令集编译,默认情况下是Thumb。注意,这里只是在“LOCAL_SRC_FILES”里列出的C文件名后加上“.arm”后缀就可以了,不要真的去改那个要编译的C文件名。
adbi\instruments\example目录下的实例是用第二种方法指定“epoll.c”编译成Thumb指令,而“epoll_arm.c”编译成Arm指令集,同时连接通过base编译出的静态库。
三、 adbi源码中inline Hook实现的流程总结
- 在so库文件加载注入到Android目标进程中调用so库文件的构造函数时,调用inline Hook操作Hook目标进程的目标函数;
- 通过遍历目标进程的内存布局信息,获取到被Hook目标函数所在的so库文件的内存加载基地址以及解析该so库文件的“.symtab”或者“.dynsym”节获取被Hook目标函数的RVA,进而获取到被Hook目标函数的调用地址;
- 通过判断被Hook目标函数调用地址的最后两位是不是全0,来判断被Hook目标函数的指令运行模式是Thumb模式还是Arm模式;
- 如果是Arm指令集模式,先保存被Hook目标函数的前12个字节的代码指令,然后使用12字节的Hook代码指令覆盖被Hook目标函数的前12个字节;
- 如果是Thumb指令集模式,先保存被Hook目标函数的前20个字节的代码指令,然后使用20字节的Hook代码指令覆盖被Hook目标函数的前20个字节;
- 被Hook目标函数的代码指令被Hook修改以后,调用Android系统的隐藏系统调用cacheflush刷新指令缓存,使inline Hook操作生效,待到下一次被Hook目标函数被调用就是调用的我们自定义的Hook函数。
本篇博文中使用到带有注释分析的Android Hook框架adbi的源码下载地址:http://download.csdn.net/detail/qq1084283172/9893002
参考链接:
Android平台下hook框架adbi的研究(下)
Android Arm Inline Hook
Android Hook框架adbi的分析(2)--- inline Hook的实现的更多相关文章
- Android Hook框架adbi的分析(3)---编译和inline Hook实践
本文博客地址:http://blog.csdn.net/qq1084283172/article/details/75200800 一.序言 在前面的博客中,已经分析过了Android Hook框架a ...
- Android Hook框架adbi的分析(1)---注入工具hijack
本文博客地址:http://blog.csdn.net/qq1084283172/article/details/74055505 一.Android Hook框架adbi的基本介绍 adbi是And ...
- Android平台dalvik模式下java Hook框架ddi的分析(2)--dex文件的注入和调用
本文博客地址:http://blog.csdn.net/qq1084283172/article/details/77942585 前面的博客<Android平台dalvik模式下java Ho ...
- Android平台dalvik模式下java Hook框架ddi的分析(1)
本文博客地址:http://blog.csdn.net/qq1084283172/article/details/75710411 一.前 言 在前面的博客中已经学习了作者crmulliner编写的, ...
- android hook 框架 ADBI 如何实现dalvik函数挂钩
Android so注入-libinject2 简介.编译.运行 Android so注入-libinject2 如何实现so注入 Android so注入-Libinject 如何实现so注入 A ...
- Android Hook框架adbi源码浅析(一)
adbi(The Android Dynamic Binary Instrumentation Toolkit)是一个Android平台通用hook框架,基于动态库注入与inline hook技术实现 ...
- Android Hook框架adbi源码浅析(二)
二.libbase 其实上面加载完SO库后,hook的功能我们完全可以自己在动态库中实现.而adbi作者为了方便我们使用,编写了一个通用的hook框架工具即libbase库.libbase依然在解决两 ...
- android hook 框架 ADBI 如何实现so函数挂钩
上一篇 android 5 HOOK 技术研究之 ADBI 项目 02 分析了hijack.c, 这个文件编译为一个可执行程序 hijack, 该程序实现了向目标进程注入一个动态库的功能.这一篇继续研 ...
- android hook 框架 ADBI 如何实现so注入
Android so注入-libinject2 简介.编译.运行 Android so注入-libinject2 如何实现so注入 Android so注入-Libinject 如何实现so注入 A ...
随机推荐
- HDOJ-1260(动态规划水题)
Tickets HDOJ-1260 #include<bits/stdc++.h> using namespace std; const int maxn=2003; int n; int ...
- 10个顶级Python实用库,推荐你试试!
为什么我喜欢Python?对于初学者来说,这是一种简单易学的编程语言,另一个原因:大量开箱即用的第三方库,正是23万个由用户提供的软件包使得Python真正强大和流行. 在本文中,我挑选了15个最有用 ...
- Python——input与raw_input的区别
区别一: raw_input():python2版本 input():python3版本 区别二: raw_input()不管是输数字还是字符串,结果都会以字符串的形式展现出来 input()则是 ...
- 「视频小课堂」Logstash如何成为镇得住场面的数据管道(文字版)
视频地址 B站视频地址:Logstash如何成为镇得住场面的数据管道 公众号视频地址:Logstash如何成为镇得住场面的数据管道 知乎视频地址:Logstash如何成为镇得住场面的数据管道 内容 首 ...
- MySQL入门(5)——运算符
MySQL入门(5)--运算符 算术运算符 MySQL支持的算数运算符包括加.减.乘.除.求余. 符号 作用 + 加法运算 - 减法运算 * 乘法运算 / 除法运算 % 求余运算 DIV 除法运算,返 ...
- P1071 潜伏者(JAVA语言)
//HashMap大法好 题目描述 RR国和SS国正陷入战火之中,双方都互派间谍,潜入对方内部,伺机行动.历尽艰险后,潜伏于SS国的RR 国间谍小CC终于摸清了 SS 国军用密码的编码规则: 1. S ...
- 如何使用Topshelf与.NET泛型主机建立Windows服务
1 前置阅读 在阅读本文章之前,你可以先阅读: Topshelf一个用于使用.NET构建Windows服务框架 2 使用 2.1 创建应用程序 首先,创建一个新的控制台应用程序并从nuget获取Top ...
- [Fundamental of Power Electronics]-PART II-8. 变换器传递函数-8.1 Bode图回顾
8.0 序 工程设计过程主要包括以下几个过程: 1.定义规格与其他设计目标 2.提出一个电路.这是一个创造性的过程,需要利用工程师的实际见识和经验. 3.对电路进行建模.变换器的功率级建模方法已经在第 ...
- java面试-JVM常用的基本配置参数有哪些?
1.-Xms 初始大小内存,默认为物理内存 1/64,等价于 -XX:InitialHeapSize 2.-Xmx 最大分配内存,默认为物理内存的 1/4,等价于 -XX:MaxHeapSize 3. ...
- JS基础学习第三天
条件分支语句switch语句语法: 1234567891011121314 switch(条件表达式){ case 表达式: 语句... break; case 表达式: 语句... break; c ...