MicroPython教程之TPYBoard v102 CAN总线通信
0x00前言
CAN是控制器局域网络(ControllerAreaNetwork,CAN)的简称,是ISO国际标准化的串行通信协议。CAN总线结构简单,只需2根线与外部相连,并且内部集成了错误探测和管理模块。
本篇文章以TPYBoardv102开发板为例,为大家介绍一下如何使用STM32自带的CAN控制器,来实现两个开发板之间的CAN通讯。
0x01实验器材
TPYBoardv102开发板2块
杜邦线若干
CAN总线收发器模块VP230(SN65HVD230)2个
0x02前期准备
1. TPYBoardv102的CAN控制器。
v102上有两个CAN控制器,分别为CAN1和CAN2,对应引脚如下:
|
CAN1(RX) |
Y3 |
|
CAN1(TX) |
Y4 |
|
CAN2(RX) |
Y5 |
|
CAN2(TX) |
Y6 |
v102上虽然已经有两个CAN控制器,但是想要完成两个板子之间的CAN通讯,还需要搭配CAN收发器模块。CAN收发器就是CAN控制器和物理总线之间的接口,主要作用就是将CAN控制器的逻辑电平转换为CAN总线的差分电平,在两条有差分电压的总线电缆上传输数据。
2. 去tpyboard的官网看看CAN类库的介绍。
http://docs.tpyboard.com/zh/latest/library/pyb.CAN/?highlight=pyb.CAN
看一下官方的实例代码,这些基本上够用了。
from pyb import CAN
can = CAN(1, CAN.LOOPBACK)
can.setfilter(0, CAN.LIST16, 0, (123, 124, 125, 126)) # set a filter to receive messages with id=123, 124, 125 and 126
can.send('message!', 123) # send a message with id 123
can.recv(0) # receive message on FIFO 0
0x03硬件连接
两个v102我用的都是CAN1。具体连接示意图如下:
|
TPYBoard v102 (CAN1) |
CAN收发器模块 |
|
3.3V |
VCC |
|
GND |
GND |
|
Y3(RX) |
RX |
|
Y4(TX) |
TX |
两个收发器之间H接H、L接L即可。
0x04源代码
第一个板子等待接收,当接收到数据再发送。
import pyb
from pyb import CAN can = CAN(1, CAN.NORMAL)
can.setfilter(0, CAN.LIST16, 0, (123, 124, 125, 126)) # set a filter to receive messages with id=123, 124, 125 and 126
while True:
if can.any(0):
data=can.recv(0) # receive message on FIFO 0
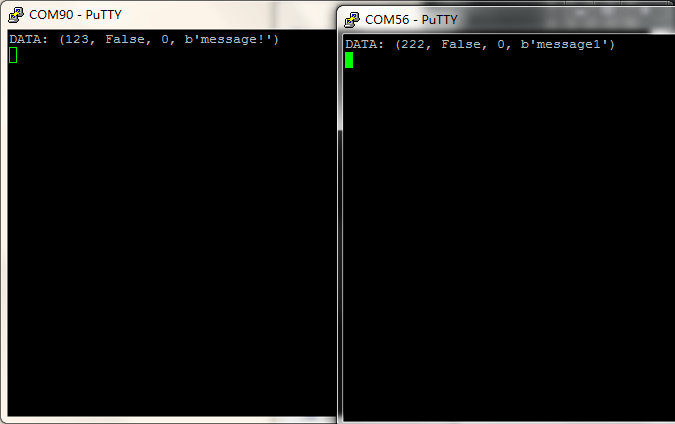
print('DATA:',data)
can.send(b'message1',222)
第二板子是先发送,然后等待接收。
# main.py -- put your code here!
from pyb import CAN
can = CAN(2, CAN.NORMAL)
can.setfilter(0, CAN.LIST16, 0, (222,221,231,241)) # set a filter to receive messages with id=123, 124, 125 and 126
can.send('message!', 123) # send a message with id 123
while True:
if can.any(0):
data=can.recv(0) # receive message on FIFO 0
print('DATA:',data)
0x05效果图
MicroPython教程之TPYBoard v102 CAN总线通信的更多相关文章
- MicroPython教程之TPYBoard开发板DIY小型家庭气象站
众所周知,iPhone6/6Plus内置气压传感器,不过大家对于气压传感器还是很陌生.跟字面的意思一样,气压传感器就是用来测量气压的,但测量气压对于普通的手机用户来说又有什么作用呢? 海拔高度测量 对 ...
- MicroPython教程之TPYBoard开发板DIY红外寻迹小车
智能小车现在差不多是电子竞赛或者DIY中的主流了,寻迹,壁障,遥控什么的,相信大家也都见得很多了,这次就大家探讨一下寻迹小车的制作方法,不同于以往的是这次的程序不用C语言写,而是要使用python语言 ...
- Micropython教程之TPYBoard制作蓝牙+红外循迹小车
1.实验目的 学习在PC机系统中扩展简单I/O接口的方法. 进一步学习编制数据输出程序的设计方法. 学习蓝牙模块的接线方法及其工作原理. 学习L298N电机驱动板模块的接线方法. 学习蓝牙控制小车的工 ...
- Micropython教程之TPYBoard开发板驱动舵机教程(萝卜学科编程教育)
大家应该都看到过机器人的手臂啊腿脚啊什么的一抽一抽的在动弹吧...是不是和机械舞一样的有节奏,现在很多机器人模型里面的动力器件都是舵机. 但是大家一般见到的动力器件都是像步进电机,直流电机这一类的动力 ...
- Micropython教程之TPYBoardv102 DIY蓝牙智能小车实例
1.实验目的 1.学习在PC机系统中扩展简单I/O接口的方法. 2.进一步学习编制数据输出程序的设计方法. 3.学习蓝牙模块的接线方法及其工作原理. 4.学习L298N电机驱动板模块的接线方法. 5. ...
- MicroPython TPYBoard v102 无线红外遥控舵机(基于红外解/编码模块)
转载请注明文章来源,更多教程可自助参考docs.tpyboard.com,QQ技术交流群:157816561,公众号:MicroPython玩家汇 红外解码/编码模块介绍 模块上搭载了红外接收头.红外 ...
- MicroPython之TPYBoard v102开发板控制OLED显示中文
转载请以链接形式注明文章来源,公众号:MicroPython玩家汇 0x00前言 之前看到一篇文章是关于TPYBoardv102控制OLED屏显示的,看到之后就想尝试一下使用OLED屏来显示中文.最近 ...
- MicroPython开发板:TPYBoard v102 播放音乐实例
0x00前言 前段时间看到TPYBoard的技术交流群(群号:157816561,)里有人问关于TPYBoard播放音乐的问题.最近抽空看了一下文档介绍,着手做了个实验.更多MicroPython的教 ...
- [TPYBoard - Micropython 之会python就能做硬件 9] 五分种学会用TPYBoard V102 制作避障小车(升级版)
转载请注明:@小五义 http://www.cnblogs.com/xiaowuyi 欢迎加入讨论群 64770604 感谢山东萝卜电子科技公司授权 一.实验器材 1.TPYboard V102板 ...
随机推荐
- js事件底层原理探究
<!DOCTYPE html> <html> <head lang="en"> <meta charset="UTF-8&quo ...
- mac os x 触摸板点击无效
macbook默认轻击触摸板无效,这样是为了防止误点击.可是习惯了windows笔记本的我对这一设置非常不习惯. 能够在"system preference"的"Trac ...
- Android音频: 怎样使用AudioTrack播放一个WAV格式文件?
翻译 By Long Luo 原文链接:Android Audio: Play a WAV file on an AudioTrack 译者注: 1. 因为这是技术文章,所以有些词句使用原文,表达更准 ...
- Java数组的一些使用方法及堆栈存储
数组 用于存储一组同一数据类型数据的容器 数组会对放入其中的数据自动编号,编号是从0开始的---下标 定义格式 数据类型[] 数组名 = new 数据类型[数组的大小];---可以先声明再初始化 in ...
- vue.js使用webpack发布,部署到服务器上之后在浏览器中可以查看到vue文件源码
webpack+vue 2.0打包发布之后,将发布的文件部署到服务器中之后,浏览器中访问的时候会出现一个webpack文件夹,里边会显示vue文件源码 如果不想让vue源文件显示出来,可以在confi ...
- 盘点selenium phantomJS使用的坑
参考:http://www.jianshu.com/p/9d408e21dc3a http://www.cnblogs.com/luxiaojun/p/6144748.html 豆瓣应该是ip被封 ...
- 《HelloGitHub》第 21 期
公告 元旦快乐! <HelloGitHub>第 21 期 兴趣是最好的老师,HelloGitHub 就是帮你找到兴趣! 简介 分享 GitHub 上有趣.入门级的开源项目. 这是一个面向编 ...
- HTML基础教程-简介
关于html5笔记前言 之前有在W3school学习过html5以及javascript.为了和大家一块学习,为了回顾这些遗忘的基础,现在我把之前自己整理的笔记共享给大家.希望大家共同进步. HTML ...
- iOS 实现UIImageView 的不停的旋转(更新:2017.7.26)
1.先创建一个UIImageView. - (void)createImageView { UIImageView *imageView = [[UIImageView alloc] initWith ...
- 常规流(Normal flow)
连我自己把float和绝对定位,都称为脱离文档流,想想概念又不那么清晰,于是寻找了W3C资料来理解,才发觉不应该叫文档流. 资料 英文:https://www.w3.org/TR/CSS22/visu ...