TI 多模雷达1843毫米波雷达做自动泊车(用了8个雷达)
http://e2e.ti.com/blogs_/b/behind_the_wheel/archive/2019/01/09/how-mmwave-sensors-enable-autonomous-parking
77-GHz single-chip mmWave sensors enable autonomous parking
Have you ever spent time looking for a parking spot at a shopping mall or a grocery store and wished that your car could drop you off at the entrance and go park itself, especially during harsh weather conditions like when it’s raining, or on an extremely hot day? How much time would you save if you didn’t have to drive around looking for a parking spot? (Or, how much money would you save by not paying for valet service?). Well, self-parking cars could be a reality soon, as carmakers adopt millimeter-wave (mmWave) radar sensors for automated parking applications.
You might wonder: don’t surround-view cameras and ultrasonic sensors already provide the ability to park cars? Today’s sensors enable parking assistance; in other words, the driver still has to make a judgment based on sensor feedback. Therefore, the cars are not completely autonomous.
Autonomous parking needs to first identify the empty parking spot or “free space” at distances of approximately 40 m. This is its “search mode.” Once it has identified an open space, the car needs to maneuver into it and park itself, called “park mode.”
To enable automated parking functionality, the sensor should be capable of detecting objects such as other cars, curbs, and pedestrians, from 3 cm to more than 40 m in a wide field of view, in any kind of environmental conditions. mmWave sensors help to achieve this functionality by accurately detecting smaller objects that may go undetected by other sensing modalities (such as a metal rod protruding from the ground) from a distance of less than 25 cm. mmWave sensors also continue to function under a variety of weather and lighting conditions.
Sensor installation
Installing sensors in a car is a major challenge today. Because mmWave sensors can be easily installed behind bumpers, there is no need to create holes in the body or chassis of the car. This is because millimeter waves pass through solid materials like plastic and bumpers, irrespective of car manufacturer or car model, standardizing their installation. The number of sensors needed to achieve a 360-degree sensing capability around the car is also much less compared to other sensing modalities. Eight sensors are positioned around the car to enable 360-degree sensing, as shown in Figure 1.

Figure 1: mmWave sensors provide 360-degree sensing capabilities around the car to enable automated parking applications
Multi-modal sensors
Automated parking is enabled by repurposing the existing front and rear corner radars, which are multimodal. When the car is in drive mode, these sensors can be used as blind-spot-detection sensors or lane-change-assistance sensors, where detection can happen at a distance of 80 m in order to detect cars in other lanes. When the car is in the search or park mode, the sensor’s configuration changes dynamically so that it can sense objects at shorter distances, from 40 m to less than 10 cm – a sufficient range for parking applications. Multi-modal obstacle-detection sensors on doors can also be repurposed for parking applications. For these reasons, mmWave sensors are becoming attractive to Tier-1 car manufacturers. Table 1 lists the benefits of using mmWave sensors for automated parking applications.
|
Feature |
Benefit |
|
Long detection range |
Sense pedestrians and other objects at distances greater than 40 m |
|
Wide field of view |
Sense objects in 3D space around the car |
|
Repurposing of the corner radar sensors |
Reduce the number of sensors needed at the system level |
|
Multimodal capability |
Sense objects at 40 m or 5 m dynamically |
Table 1: System-level benefits of using mmWave sensors for automated parking applications
Texas Instruments’ AWR1843 is a 77-GHz single-chip mmWave sensor with integrated digital signal processing, memory and radar acceleration unit to enable autonomous parking applications, as shown in Figure 2.
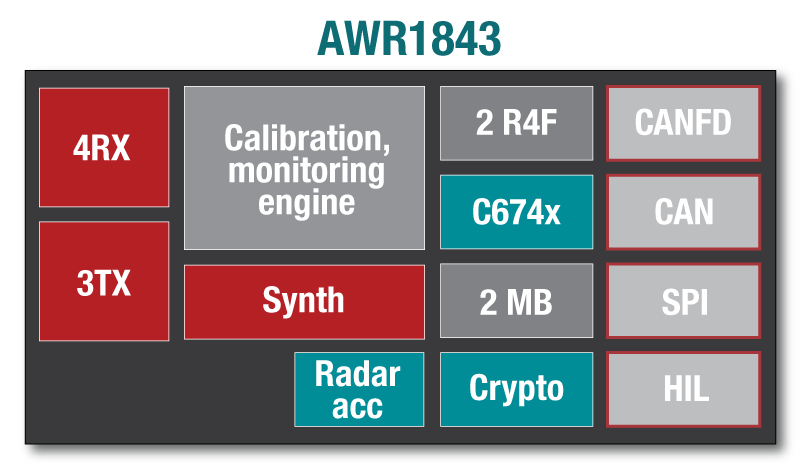
Figure 2: Components of the AWR1843 parking chip.
Table 2 conveys the application benefits of the AWR1843.
|
Feature |
Benefit |
|
Three-transmit antenna |
Detect objects in azimuth and elevation planes |
|
DSP and on-chip memory |
Process complex algorithms on the chip efficiently |
|
Radar accelerator unit |
Perform fast Fourier transform operations in hardware to hasten the process |
|
5-degree phase rotator per transmit antenna |
Perform beam forming, which enhances object detection |
Table 2: AWR1843 device features and application benefits
Carmakers and Tier-1 original equipment manufacturers are increasingly adopting mmWave sensors for various driver-assistance and automated parking functions. It is primarily because of the features and benefits that mmWave offers – including a higher degree of integration leading to a reduced form factor – that can enhance autonomous driving.
TI 多模雷达1843毫米波雷达做自动泊车(用了8个雷达)的更多相关文章
- UWP Jenkins + NuGet + MSBuild 手把手教你做自动UWP Build 和 App store包
背景 项目上需要做UWP的自动安装包,在以前的公司接触的是TFS来做自动build. 公司要求用Jenkins来做,别笑话我,之前还真不晓得这个东西. 会的同学请看一下指出错误,不会的同学请先自行脑补 ...
- 使用 advanced installer 为 winform 做自动更新
原文:使用 advanced installer 为 winform 做自动更新 advanced installer 是一款打包程序,基于 windows installer 并扩展了一些功能,比如 ...
- 第四代自动泊车从APA到AVP技术
第四代自动泊车从APA到AVP技术 前言 自动泊车是指汽车自动泊车入位不需要人工控制,系统能够自动帮你将车辆停入车位,在倒车入库中可谓是驾驶者的一项利器.当我们找到一个理想的停车地点,只需轻轻启动按钮 ...
- 论文阅读: v-charge项目: 电动车的自动泊车和充电
Abstract AVP服务会缓和电动车现有两个缺点: 有限的行驶范围和很长的充电时间. v-charge用相机和超声波在GPS-denied的区域全自动形式. 这篇paper叙述了下述几方面的优势: ...
- APA自动泊车系统
APA自动泊车系统 1. 半自动泊车 自动泊车又称为自动泊车入位,它对于新手来说是一项相当便捷的配置,对于老手来说也省了些不少力气.那么自动泊车的原理是什么呢?能想怎么停就怎么停,想停哪儿就停哪儿吗? ...
- 用expect做自动应答脚本
Expect是一个用来实现自动交互功能的软件套件 (Expect [is a] software suite for automating interactive tools).使用它系统管理员可以创 ...
- ThinkPHP做自动登陆及异位或加密COOKIE!
异位或加密方法: /* *登陆如果自动登陆加密 *默认是0解密状态,1是加密 *采用的方法是异位或加密 */ function encrytion($value,$type=0){ $key = md ...
- 如何用Github钩子做自动部署
最近机缘巧合的购置了域名和服务器,不用实在是浪费,再加上一直没有属于自己的个人网站,所以打算用hexo在服务器上玩一下,这样也就不用再纠结用Github pages还是Gitee pages了.当然, ...
- 利用web工具splinter模拟登陆做自动签到
首先,我需要的工具和组件有: Chrome浏览器 浏览器驱动ChromeDriver Python 3.5 Web应用测试工具Splinter 代码部分: from splinter import B ...
随机推荐
- jdbc连接oracle时使用的字符串格式
两种方式: SID的方式: jdbc:oracle:thin:@[HOST][:PORT]:SID SERVICE_NAME的方式: jdbc:oracle:thin:@//[HOST][:PORT] ...
- STL之Map和multimap容器
1.Map和multimap容器 1)map是标准的关联式容器,一个map是一个键值对序列,即(key,value)对.它提供基于key的快速检索能力. 2)map中key值是唯一的.集合中的元素按一 ...
- python 数据较大 性能分析
前提:若有一个几百M的文件需要解析,某个函数需要运行很多次(几千次),需要考虑性能问题 性能分析模块:cProfile 使用方法:cProfile.run("func()"),其中 ...
- mvc未登录跳转到登录界面
编写一个mvc控制器基类BaseController , 其继承自controller 重写其OnActionExecuting方法, 在其中检测session值,如果没有,则跳转至登录页面. 如下
- 【Redis学习之六】Redis数据类型:集合和有序集合
环境 虚拟机:VMware 10 Linux版本:CentOS-6.5-x86_64 客户端:Xshell4 FTP:Xftp4 jdk8 redis-2.8.18 一.集合 Set无序的.去重的元素 ...
- 【Linux学习十】负载均衡带来tomcat的session不一致问题
环境 虚拟机:VMware 10 Linux版本:CentOS-6.5-x86_64 客户端:Xshell4 FTP:Xftp4 tomcat7 jdk7 session不一致是指web服务器(tom ...
- Linux基础命令---vim文本编辑
vim vim是unix系统最通用的文本编辑器,它的功能可以说是非常强大了,它是vi的升级版.vim有三种工作模式:编辑模式.命令模式.末行模式,默认打开的时候进入命令模式. 此命令的适用范围:Red ...
- Linux基础命令---arch
Arch Arch指令主要用于显示当前主机的硬件结构类型,我们可以看到它输出的结果有:i386.i486.mips.alpha等.此命令的适用范围:RedHat.RHEL.Ubuntu ...
- JS 测试网络速度与网络延迟
一.延迟与网速 通过js加载一张1x1的极小图片,测试出图片加载的所用的时长.如果换一个几百KB的图片,则可心用来计算下载网速 document.write('<input type=" ...
- 底层代码创建GUI
%底层代码创建GUI hf = figure(... 'Units','Normalized',... 'Color','w',... 'Position',[0.1 0.1 0.8 0.8]); h ...