Rgb2Gray
- GPU上运行的函数又称为Kernel,用
__global__修饰 - 调用Kernel函数时,用
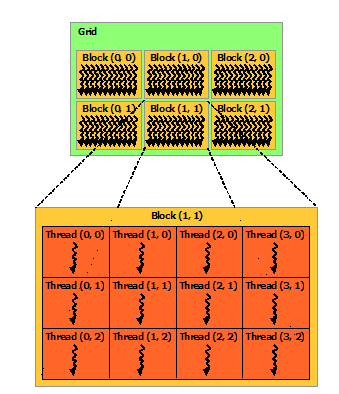
FunctionCall<<<block_shape, thread_shape, int>>>(args1, args2, ...) - block_shape与thread shape都是一个三维的结构dim(x,y,z), 其中x为横向,y为纵向。变化最快的维度为x,其他为y,最后为z。所以维度为(i,j,k)的thread或block的Index实际上是:
k * Dim.x * Dim.y + j * Dim.x +i - 每个block中的线程数量有一定的限制,老的GPU通过为512个,较新的GPU则通常有1024个,所以每个block中的线程最好不要超过(32,32)
#include <iostream>
#include <cuda_runtime.h>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
struct image_pixel {
uchar r;
uchar g;
uchar b;
};
__global__ void Rgb2Gray(image_pixel *d_color_data, uchar *d_gray_data, int image_rows, int image_cols) {
int i = blockIdx.x * blockDim.x + threadIdx.x;
int j = blockIdx.y * blockDim.y + threadIdx.y;
if (i < image_cols && j < image_rows) {
int pixel_index = image_cols * j + i;
image_pixel pixel = d_color_data[pixel_index];
d_gray_data[pixel_index] = pixel.r * 0.299 + pixel.g * 0.587 + pixel.b * 0.114;
}
}
int main(int argc, char *argv[]) {
cv::Mat image = cv::imread("/home/yansheng/Pictures/fbb.jpg");
if (!image.isContinuous()) {
std::cout << "The image data is not continuous" << std::endl;
return -1;
}
int image_rows = image.rows;
int image_cols = image.cols;
std::cout << "Image Width: " << image.cols << std::endl;
std::cout << "Image Height: " << image.rows << std::endl;
image_pixel *d_color_data;
uchar *d_gray_data;
cudaMalloc((void **)&d_color_data, image_rows * image_cols * sizeof(image_pixel));
cudaMalloc((void **)&d_gray_data, image_rows * image_cols);
cudaMemcpy(d_color_data, image.data, image_rows * image_cols * sizeof(image_pixel), cudaMemcpyHostToDevice);
dim3 block_dim(16, 16);
dim3 grad_dim(image_cols / block_dim.x + 1, image_rows / block_dim.y + 1);
Rgb2Gray<<<grad_dim, block_dim>>>(d_color_data, d_gray_data, image_rows, image_cols);
cv::Mat gray(image.size(), CV_8UC1);
cudaMemcpy(gray.data, d_gray_data, image_rows * image_cols, cudaMemcpyDeviceToHost);
cv::imshow("Gray", gray);
cv::waitKey();
return 0;
}
Rgb2Gray的更多相关文章
- verilog实现rgb2gray
前言 项目算法需求,需要将RGB彩色图像转换为灰度图像,算法原理是很简单的,但是对于刚接触FPGA的宝宝来说,进行时序的设计和调试还是不那么容易的,为了省事儿,就按照上一篇中值滤波(http://ww ...
- RGB2YCbCr RGB2Gray
Y = 0.2990R+0.5870G+0.1140B; Cb=-0.1687R-0.3313G+0.5000B+128; ...
- opencv中彩色图转换成灰度图rgb2gray
imread函数读入图像: 只需要将imread的第二个参数置为0即可. Mat imread(const string& filename, intflags=1 ); 第一个参数是载入图片 ...
- RGB2GRAY 各种算法速度比较,整形乘法比查表法快!
1. 查表法,外循环用 这种格式 : //for(int j = 0; j != h; ++j)// for(int i = 0; i!=w;++i)//. for(int j = 0; j != ...
- Atitit java c# php c++ js跨语言调用matlab实现边缘检测等功能attilax总结
Atitit java c# php c++ js跨语言调用matlab实现边缘检测等功能attilax总结 1.1. 边缘检测的基本方法Canny最常用了1 1.2. 编写matlab边缘检测代码, ...
- SVD的几何意义,以及在去噪,推荐系统中的应用
很多文章说到奇异值分解的时候总是大概罗列下它的功能,并没有对功能及物理意义进行过多的阐述,现在我来对奇异值进行整理一下. 一 奇异值分解 对任意的矩阵A∈Fmn,rank(A)=r(矩阵的秩),总可以 ...
- DOG检测
共享一个代码算了,太忙鸟,有时间在补充. function [] = dog_learn() img = imread('/Users/img/lena.png'); img = rgb2gray(i ...
- 一维码:EAN-13码的识别
1.一维码简述: 一维条码是一种能用于信息编码和信息自动识别的标准符号,是由一组宽度不同的黑白符号按一定规则交替排列编码组成的图形符号,用于表示一定的信息. 码制指条码符号的类型,不同的类型有不同的编 ...
- matlab函数大全
Matlab 图像处理相关函数命令大全 一.通用函数: colorbar 显示彩色条 语法:colorbar \ colorbar('vert') \ colorbar('horiz') \ col ...
随机推荐
- c/c++ 整数除预算保留小数
两个整数相除会自动省略小数点后的小数位即使下面这种: int a,int b; int a = 4; int b = 3; double d = a/b; d= 1.0000000; -------- ...
- ABAP-FTP-执行
1.界面 2.程序 ZFID0004_FTP_EXEC 主程序: *&------------------------------------------------------------- ...
- 微信小程序--数据存储
对本地缓存数据操作分为同步和异步两种.同步方法有成功回调函数,表示数 据处理成功后的操作.下面是小程序提供本地缓存操作接口: 以Sync结尾都是同步方法.同步方法和异步方法的区别是: 同步方法会堵塞当 ...
- python入门(五):切片列表元祖字典
1.切片 针对序列,使用切片可以获得我们想要的内容 序列:字符串.列表.元祖 特点:可以使用坐标获取某一个值.坐标是从0开始算 >>> s="0123456789" ...
- zabbix-3.4.10系列
第1节 zabbix体系架构图:
- Codeforces Round #499 (Div. 2)
Codeforces Round #499 (Div. 2) https://codeforces.com/contest/1011 A #include <bits/stdc++.h> ...
- 转)Ubuntu16.04下安装DDD(Data Display Debugger)
以下转自:http://www.linuxdiyf.com/linux/26393.html 前两天在Linux论坛偶然间看到了DDD这个软件,根据介绍是一个gdb界面化的调试软件,这正是我找了好 ...
- MAC shell ps 命令详解(转)
ps命令为我们提供了一次性的查看进程结果,它所提供的查看结果不是动态连续的:如果想对进程时间监控,应该用top工具 Linux中的ps命令是Process Status的缩写.ps命令用来列出系统中当 ...
- 4412 uboot启动分析
感谢sea1105, https://blog.csdn.net/sea1105/article/details/52142772 在学习过程中,由于tiny4412资料太过于少,因此参考210的视屏 ...
- Golang中的三个点
之前提到了把一个切片追加到另外一个切片时使用到了... 今天我们好好研究一下这三个点,博客写着写着又成了,回字有四种写法 ...第一种用法,可变长的参数 package main import &qu ...