UE4官方行为树快速入门文档解析和修改
近学习了UE4官方文档的行为树快速入门指南,发现里面的部分逻辑稍稍有点混乱和重叠,于是加入了自己的想法,修改了部分行为树逻辑,优化了其AI寻路能力。
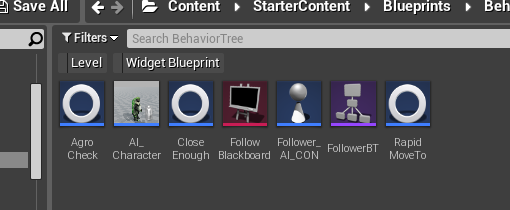
初始的基本操作和资源创建同官方文档一样:1个Follower_AI_CON即AI控制器,1个FollowerBT行为树,1个FollowBlackboard黑板,1个Character蓝图资源AI_Character。
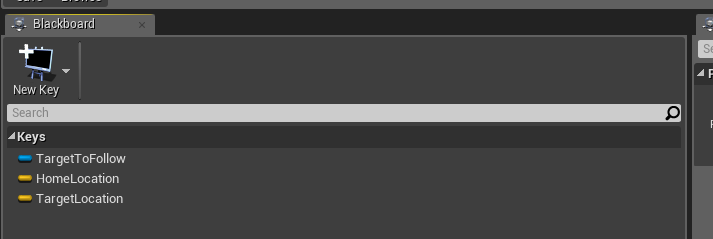
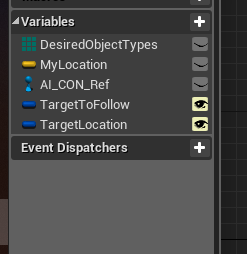
打开FollowBlackboard黑板资源,创建1个TargetToFollow的Object变量,1个HomeLocation的Vector变量,1个TargetLocation的Vector变量,保存后退出。
打开Follower_AI_CON控制器,创建1个HomeLocation的Name变量,编写蓝图节点逻辑
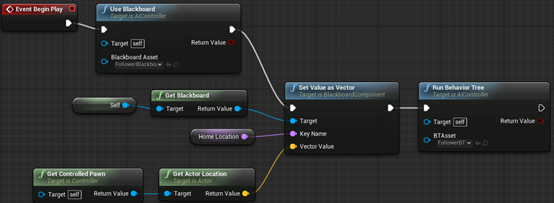
添加EventBeginPlay事件,绑定黑板资源为FollowBlackboard,设置HomeLocation变量存储AI_Character的初始坐标(Target为黑板自身,KeyName为Name变量HomeLocation,VectorValue为AI控制器下Pawn的ActorLocation),之后运行行为树FollowerBT。

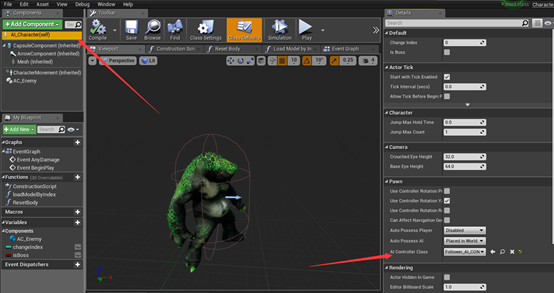
打开AI_Character蓝图,在Mesh中指定人物骨骼和角色动画蓝图,选中Components窗口的AI_Character(self),在Pawn选项中指定AIControllerClass为Follower_AI_CON,这样在创建AI_Character实例时,会自动创建1个AI控制器。
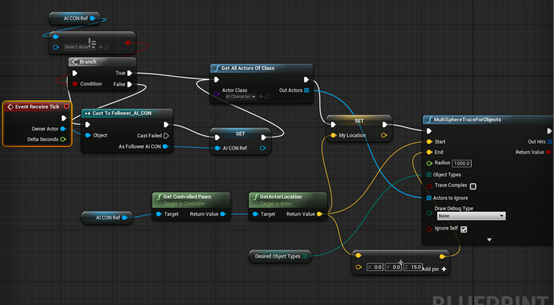
打开FollowerBT行为树,点击NewService,创建一个AgroCheck业务,前面的逻辑和官方文档一样,添加Branch节点判断AI控制器的引用AI_CON_Ref是否为空,空则将EventReceiveTick的OwnerActor输入参数强制转换成目标AI控制器后赋值给AI_CON_Ref。之后获取到场景中的所有AI_Character(在目标检测中作为忽略Actor目标,防止AI_Character互相检测导致混乱);获取到AI控制器下Pawn的ActorLocation作为目标检测的圆心(同时设置为MyLocation),Z轴添加15单位作为球体检测的半径终点,辐射半径设为1000作为目标检测的范围,检测的目标种类拖选成数组后设置为Pawn(即只会检测到类型为Pawn的目标)。
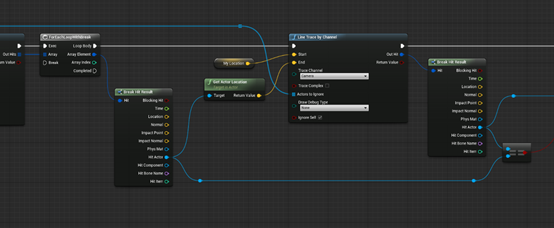
个人觉得接下来官网教程的蓝图逻辑有些不合适。官网上将目标检测的结果循环遍历,创建一个射线检测,MyLocation为起点,目标检测到的Actor为终点(即二次检测),别忘了Actor to Ignore连接到AI_Character。将射线检测的结果Actor和目标检测的结果Actor进行比较,结果作为Branch节点的判断依据,相同则将该Actor设为TargetToFollow,并将其Location设为TargetLocation;不相同则将TargetToFollow设为空值。
个人觉得不合理的地方如下:
1.对目标进行的二次检测重复多余,且没有意义,相当于将一个数组中的元素与数组中的所有元素进行比较(包括自身比较自身,且逻辑上两两比较了两遍),增加了逻辑复杂度和时间复杂度,导致的结果是之后的Branch节点频繁被调用,双分支(True,False)一直在重复执行;
2.并没有突出检测到的目标为正确寻路目标,而是使得所有在检测范围内的Pawn都符合寻路条件,AI_Character会将检测到的第一个Pawn作为跟踪对象;
3.目标监测范围内没有Pawn时,数组为空,导致之后的Branch节点不会执行。
所以我在官方文档的基础上加入了自己的想法,更改后的蓝图逻辑如下:

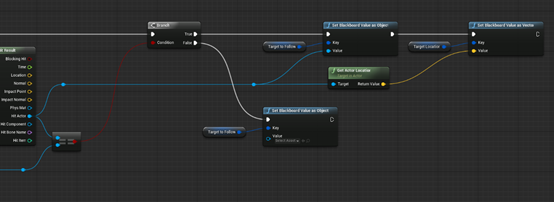
对目标检测的输出进行Branch判断,检测到Pawn目标时进行数组循环遍历,没有Pawn目标时直接对TargetToFollow赋值为空。对HitResult的Actor进行强制类型转换,转换成PlayerCharacter(玩家控制的角色),转换成功则表示玩家进入AI_Character的检测范围,并将玩家设置为TargetToFollow,玩家的Location设置为TargetLocation。
打开FollowerBT行为树,点击NewDecorator创建一个CloseEnough的Decorator,
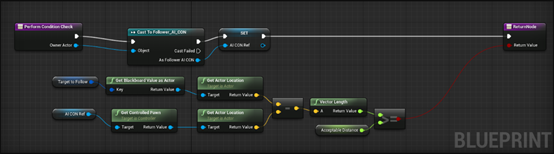
将输入参数OwnerActor强制转换为Follower_AI_CON,赋值给AI_CON_Ref,连接到输出节点,添加1个Boolean输出参数,将TargetToFollow的Location减去AI控制器下Pawn的Location(即AI_Character和目标之间的距离)和预设距离进行比较,大于等于预测距离(即两者距离太远)则为True(继续执行Decorator下的逻辑),否则停止之后的逻辑。
打开FollowerBT行为树,点击NewTask,创建1个RapidMoveTo的任务,
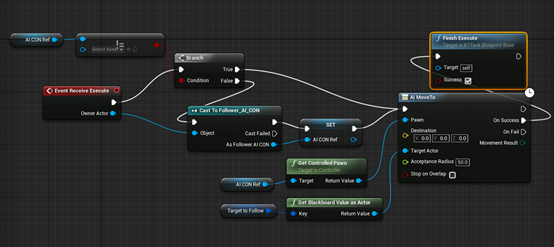
首先进行AI_CON_Ref的非空判断,为空则将OwnerActor强制转换成Follower_AI_CON赋值给它,不为空则进行AIMoveTo,Pawn为AI控制器下的Pawn(即AI_Character),TargetActor为TargetToFollow。移动成功后结束此次行为树任务。
最终的行为树运行逻辑如下:

AgroCheck的刷新Tick为0.5s,TargetToFollow和TargetLocation分别对应于黑板资源的同名参数,之后进入分支判断,TargetToFollow非空则进入左侧,AI_Character和目标的距离大于100则进行RapidMoveTo任务;TargetToFollow为空则进入右侧分支,判断AI_Character是否位于TargetLocation,及TargetLocation是否为空,如果AI_Character已经到达TargetLocation则等待2.5s后返回HomeLocation。在这里我删除了移动到TargetLocation的任务,否则会造成AI_Character在TargetLocation和HomeLocation之间不间断的移动,删除之后AI_Character移动回HomeLocation之后保持静止,直到TargetToFollow的再次确立导致的左侧行为树分支开启。
UE4官方行为树快速入门文档解析和修改的更多相关文章
- jackson官方快速入门文档
官方地址: http://jackson.codehaus.org/ http://wiki.fasterxml.com/JacksonInFiveMinutes http://wiki.faster ...
- ThinkPHP5 快速入门文档
一. 5.0版本采用模块化的设计架构,默认的应用目录下面只有一个index模块目录,如果我要添加新的模块可以使用控制台命令来生成. 切换到命令行模式下,进入到应用根目录并执行如下指令: php thi ...
- Python快速入门文档
前言 此文本质为本人学习Python过程中的笔记,部分地方叙述表达可能不够清晰,欢迎留言. (本文适合有一定程序语言基础的读者阅读(最好是c语言)) 一.基本语法 1.框架: (1)以缩进表示层次所属 ...
- 【简明翻译】Hibernate 5.4 Getting Started Guide 官方入门文档
前言 最近的精力主要集中在Hibernate上,在意识到Hibernate 5 的中文资料并不多的时候,我不得不把目光转向Hibernate的官方doc,学习之余简要翻一下入门文档. 原文地址:htt ...
- Apache BeanUtils 1.9.2 官方入门文档
为什么需要Apache BeanUtils? Apache BeanUtils 是 Apache开源软件组织下面的一个项目,被广泛使用于Spring.Struts.Hibernate等框架,有数千个j ...
- vuex最简单、最直白、最全的入门文档
前言 我们经常用element-ui做后台管理系统,经常会遇到父组件给子组件传递数据,下面一个简单的例子,点击按钮,把弹框显示变量数据通过子组件的props属性传递,子组件通过$emit事件监听把数据 ...
- 【Elastic-1】ELK基本概念、环境搭建、快速开始文档
TODO 快速开始文档 SpringBoot整合ELK(Logstash收集日志.应用主动向ES写入) ELK接入Kafka 基本概念 ElasticSearch 什么是ElasticSearch? ...
- 使用requests爬取梨视频、bilibili视频、汽车之家,bs4遍历文档树、搜索文档树,css选择器
今日内容概要 使用requests爬取梨视频 requests+bs4爬取汽车之家 bs4遍历文档树 bs4搜索文档树 css选择器 内容详细 1.使用requests爬取梨视频 # 模拟发送http ...
- 数据库 PSU,SPU(CPU),Bundle Patches 和 Patchsets 补丁号码快速参考 (文档 ID 1922396.1)
数据库 PSU,SPU(CPU),Bundle Patches 和 Patchsets 补丁号码快速参考 (文档 ID 1922396.1)
随机推荐
- Python中的分组函数(groupby、itertools)
from operator import itemgetter #itemgetter用来去dict中的key,省去了使用lambda函数 from itertools import groupby ...
- opensuse编译安装Python3后缺少zlib
目录 opensuse编译安装Python3后缺少zlib 前言 编译安装 python导入zlib 重新编译python并指定zlib opensuse编译安装Python3后缺少zlib 前言 由 ...
- beta冲刺————第一天(1/5)
人员的再次分配: 调走人员:陈裕鹏(原来在本队伍主要进行文章推荐算法的设计) 调入人员:陈邡(原Dipper团队,负责游戏内容的策划案,以及做一些后端的探索工作.) 现队员工作划分: 王国华,吴君毅, ...
- [Java123] Spring
最近转组需要Hands on进行一些Java开发工作. 已经不是用十几年前初级Java写代码就能应付的了. 踏踏实实拾起来过去含含糊糊走过的章节吧. https://www.cnblogs.com/x ...
- QGis C++ 开发之图层分类显示
开发环境:Win10 + VS2010 + Qt 4.8.6 + QGis 2.14.4 简单介绍下如何用C++方式实现QGis中图层分类显示的方法. 要实现图层的分类显示主要会用到QgsCatego ...
- html5获取地理位置信息API
html5获取地理位置信息API 在HTML5中,可以看下如何使用Geolocation API来获得用户的地理位置信息,如果该浏览器支持的话,且设备具有定位功能,就能够直接使用这组API来获取当前位 ...
- Python2.7-difflib
difflib主要用于比较两个序列的不同,常见于字符串的比较,可以对差异生成报告.SequenceMatcher 主要用于找两者相似部分,以及两者不同的转换方法,而 Differ 更注重于比较两者的区 ...
- Android 在测试阶段当出现多个测试服务器地址时打包的小技巧
前提:服务端没有做特殊处理 在开发android网络客户端项目时,不可避免的会用到“测试服务器地址”和“云端服务器地址”等.(有时可能会有多个) 这时在打包给测试那帮哥们时,你就需要一个服务器地址打上 ...
- ceph状态信息靠谱查询
1)检查集群的状态汇总信息: [root@haha1 clouder]# ceph -s cluster 8e136e25-77ab-4e0b-b24b-232a7b466cfe health HEA ...
- VS一些快捷键
参考网址:http://www.open-open.com/lib/view/open1412261028453.html (这里省去了很多大家闭上眼都会操作的什么Ctrl+S 等等操作 给出的大多是 ...