【55】目标检测之IOU交并比
交并比(Intersection over union)
你如何判断对象检测算法运作良好呢?在本笔记中,你将了解到并交比函数,可以用来评价对象检测算法。在下一个笔记中,我们用它来插入一个分量来进一步改善检测算法,我们开始吧。

在对象检测任务中,你希望能够同时定位对象,所以如果实际边界框是这样的,你的算法给出这个紫色的边界框,那么这个结果是好还是坏?
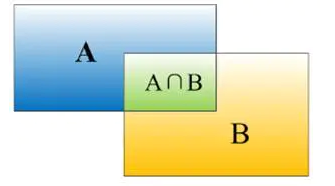
所以交并比(loU)函数做的是计算两个边界框交集和并集之比。两个边界框的并集是这个区域,就是属于包含两个边界框区域(绿色阴影表示区域),而交集就是这个比较小的区域(橙色阴影表示区域),那么交并比就是交集的大小,这个橙色阴影面积,然后除以绿色阴影的并集面积。
参考:
交并比:IOU=(A∩B)/(A∪B)
一般约定,在计算机检测任务中,如果loU≥0.5,就说检测正确,如果预测器和实际边界框完美重叠,loU就是1,因为交集就等于并集。但一般来说只要loU≥0.5,那么结果是可以接受的,看起来还可以。一般约定,0.5是阈值,用来判断预测的边界框是否正确。一般是这么约定,但如果你希望更严格一点,你可以将loU定得更高,比如说大于0.6或者更大的数字,但loU越高,边界框越精确。
所以这是衡量定位精确度的一种方式,你只需要统计算法正确检测和定位对象的次数,你就可以用这样的定义判断对象定位是否准确。再次,0.5是人为约定,没有特别深的理论依据,如果你想更严格一点,可以把阈值定为0.6。有时我看到更严格的标准,比如0.6甚至0.7,但很少见到有人将阈值降到0.5以下。
人们定义loU这个概念是为了评价你的对象定位算法是否精准,但更一般地说,loU衡量了两个边界框重叠地相对大小。如果你有两个边界框,你可以计算交集,计算并集,然后求两个数值的比值,所以这也可以判断两个边界框是否相似,我们将在下一个视频中再次用到这个函数,当我们讨论非最大值抑制时再次用到。

请听恩达老师讲的笑话:
好,这就是loU,或者说交并比,不要和借据中提到的我欠你钱的这个概念所混淆,如果你借钱给别人,他们会写给你一个借据,说:“我欠你这么多钱(I own you this much money)。”,这也叫做loU。这是完全不同的概念,这两个概念重名。
现在介绍了loU交并比的定义之后,在下一个笔记中,我想讨论非最大值抑制,这个工具可以让YOLO算法输出效果更好,我们下一个笔记继续。
【55】目标检测之IOU交并比的更多相关文章
- 目标检测 — 计算IOU
1.IOU=交集/并集 #include<iostream> #include<algorithm> #include<stdio.h> #include < ...
- 目标检测 IOU(交并比) 理解笔记
交并比(Intersection-over-Union,IoU): 目标检测中使用的一个概念 是产生的候选框(candidate bound)与原标记框(ground truth bound)的交叠率 ...
- 目标检测中常提到的IoU和mAP究竟是什么?
看完这篇就懂了. IoU intersect over union,中文:交并比.指目标预测框和真实框的交集和并集的比例. mAP mean average precision.是指每个类别的平均查准 ...
- 评价目标检测(object detection)模型的参数:IOU,AP,mAP
首先我们为什么要使用这些呢? 举个简单的例子,假设我们图像里面只有1个目标,但是定位出来10个框,1个正确的,9个错误的,那么你要按(识别出来的正确的目标/总的正确目标)来算,正确率100%,但是其实 ...
- 目标检测评价标准(mAP, 精准度(Precision), 召回率(Recall), 准确率(Accuracy),交除并(IoU))
1. TP , FP , TN , FN定义 TP(True Positive)是正样本预测为正样本的数量,即与Ground truth区域的IoU>=threshold的预测框 FP(Fals ...
- 目标检测中的IOU和CIOU原理讲解以及应用(附测试代码)
上期讲解了目标检测中的三种数据增强的方法,这期我们讲讲目标检测中用来评估对象检测算法的IOU和CIOU的原理应用以及代码实现. 交并比IOU(Intersection over union) 在目标检 ...
- AAAI 2020 | DIoU和CIoU:IoU在目标检测中的正确打开方式
论文提出了IoU-based的DIoU loss和CIoU loss,以及建议使用DIoU-NMS替换经典的NMS方法,充分地利用IoU的特性进行优化.并且方法能够简单地迁移到现有的算法中带来性能的提 ...
- ECCV 2018 目标检测 | IoU-Net:将IoU的作用发挥到极致
常见的目标检测算法缺少了定位效果的学习,IoU-Net提出IoU predictor.IoU-guided NMS和Optimization-based bounding box refinement ...
- 【目标检测】YOLO:
PPT 可以说是讲得相当之清楚了... deepsystems.io 中文翻译: https://zhuanlan.zhihu.com/p/24916786 图解YOLO YOLO核心思想:从R-CN ...
随机推荐
- redis--->字符串和哈希对比
redis 的字符串和哈希对比 相同点和不同点 相同点: 首先是他们有很多效果类似的命令,比如set和hset,mset和hmset等等 大多数情况下使用字符串存储的场景使用hash也可以实现. 不同 ...
- Web自动化测试项目(六)多环境执行
需求 使用命令行运行脚本,可以指定测试/预发布/生产环境的url,如果找不到该环境变量则默认为测试环境 python3 xxxxxx.py test 修改constants.py # DOMAIN = ...
- FFMPEG学习----打印视频信息
FFMPEG学习资料少之又少,在此推荐雷神的博客: http://blog.csdn.net/leixiaohua1020 在这里,我们把打印视频里的相关信息作为学习FFMPEG的 Hello Wor ...
- 从数组中找到topK的元素(序号)
问题: 在n个数中找出最大的k个数. 多次求min()或求max() 最简单的方法是对大小为k的数组进行n次求min计算(或者对大小为n的数组进行k次求max计算)最后能够找出最大k个数.复杂度是O( ...
- Python中zip()函数的解释和可视化
zip()的作用 先看一下语法: zip(iter1 [,iter2 [...]]) -> zip object Python的内置help()模块提供了一个简短但又有些令人困惑的解释: 返回一 ...
- tomcat-windows10环境搭建
1.进入Tomcat官网Apache Tomcat® - Welcome! 2.根据操作系统选择合适的版本下载 zip用于windows操作系统, tar.gz用于unix和linux操作系统 Bin ...
- 题解 【[MdOI2020] Decrease】
\[ \texttt{Preface} \] 感觉 C 比 B 还简单? \[ \texttt{Description} \] 给定一个 \(n×n\) 的矩阵,你可以进行若干次操作. 每次操作,你可 ...
- num07---工厂方法模式
一.简单工厂模式 [之所以叫简单,说明没有完全做到 设计模式的要求] 前言:活字印刷术,面向对象思想 复用 维护 扩展 灵活 高内聚低耦合 以 实现 一个计算器 为例: 1.创建 抽象类count, ...
- 动手学习pytorch——(1)线性回归
最近参加了伯禹教育的动手学习深度学习项目,现在对第一章(线性回归)部分进行一个总结. 这里从线性回归模型之从零开始的实现和使用pytorch的简洁两个部分进行总结. 损失函数,选取平方函数来评估误差, ...
- 02_TypeScript数据类型
typescript中为了使编写的代码更规范,更有利于维护,增加了类型校验,写ts代码必须指定类型. 1.布尔类型(boolean) var flag:boolean = true; 2.数字 ...