【55】目标检测之IOU交并比
交并比(Intersection over union)
你如何判断对象检测算法运作良好呢?在本笔记中,你将了解到并交比函数,可以用来评价对象检测算法。在下一个笔记中,我们用它来插入一个分量来进一步改善检测算法,我们开始吧。

在对象检测任务中,你希望能够同时定位对象,所以如果实际边界框是这样的,你的算法给出这个紫色的边界框,那么这个结果是好还是坏?
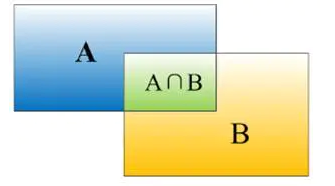
所以交并比(loU)函数做的是计算两个边界框交集和并集之比。两个边界框的并集是这个区域,就是属于包含两个边界框区域(绿色阴影表示区域),而交集就是这个比较小的区域(橙色阴影表示区域),那么交并比就是交集的大小,这个橙色阴影面积,然后除以绿色阴影的并集面积。
参考:
交并比:IOU=(A∩B)/(A∪B)
一般约定,在计算机检测任务中,如果loU≥0.5,就说检测正确,如果预测器和实际边界框完美重叠,loU就是1,因为交集就等于并集。但一般来说只要loU≥0.5,那么结果是可以接受的,看起来还可以。一般约定,0.5是阈值,用来判断预测的边界框是否正确。一般是这么约定,但如果你希望更严格一点,你可以将loU定得更高,比如说大于0.6或者更大的数字,但loU越高,边界框越精确。
所以这是衡量定位精确度的一种方式,你只需要统计算法正确检测和定位对象的次数,你就可以用这样的定义判断对象定位是否准确。再次,0.5是人为约定,没有特别深的理论依据,如果你想更严格一点,可以把阈值定为0.6。有时我看到更严格的标准,比如0.6甚至0.7,但很少见到有人将阈值降到0.5以下。
人们定义loU这个概念是为了评价你的对象定位算法是否精准,但更一般地说,loU衡量了两个边界框重叠地相对大小。如果你有两个边界框,你可以计算交集,计算并集,然后求两个数值的比值,所以这也可以判断两个边界框是否相似,我们将在下一个视频中再次用到这个函数,当我们讨论非最大值抑制时再次用到。

请听恩达老师讲的笑话:
好,这就是loU,或者说交并比,不要和借据中提到的我欠你钱的这个概念所混淆,如果你借钱给别人,他们会写给你一个借据,说:“我欠你这么多钱(I own you this much money)。”,这也叫做loU。这是完全不同的概念,这两个概念重名。
现在介绍了loU交并比的定义之后,在下一个笔记中,我想讨论非最大值抑制,这个工具可以让YOLO算法输出效果更好,我们下一个笔记继续。
【55】目标检测之IOU交并比的更多相关文章
- 目标检测 — 计算IOU
1.IOU=交集/并集 #include<iostream> #include<algorithm> #include<stdio.h> #include < ...
- 目标检测 IOU(交并比) 理解笔记
交并比(Intersection-over-Union,IoU): 目标检测中使用的一个概念 是产生的候选框(candidate bound)与原标记框(ground truth bound)的交叠率 ...
- 目标检测中常提到的IoU和mAP究竟是什么?
看完这篇就懂了. IoU intersect over union,中文:交并比.指目标预测框和真实框的交集和并集的比例. mAP mean average precision.是指每个类别的平均查准 ...
- 评价目标检测(object detection)模型的参数:IOU,AP,mAP
首先我们为什么要使用这些呢? 举个简单的例子,假设我们图像里面只有1个目标,但是定位出来10个框,1个正确的,9个错误的,那么你要按(识别出来的正确的目标/总的正确目标)来算,正确率100%,但是其实 ...
- 目标检测评价标准(mAP, 精准度(Precision), 召回率(Recall), 准确率(Accuracy),交除并(IoU))
1. TP , FP , TN , FN定义 TP(True Positive)是正样本预测为正样本的数量,即与Ground truth区域的IoU>=threshold的预测框 FP(Fals ...
- 目标检测中的IOU和CIOU原理讲解以及应用(附测试代码)
上期讲解了目标检测中的三种数据增强的方法,这期我们讲讲目标检测中用来评估对象检测算法的IOU和CIOU的原理应用以及代码实现. 交并比IOU(Intersection over union) 在目标检 ...
- AAAI 2020 | DIoU和CIoU:IoU在目标检测中的正确打开方式
论文提出了IoU-based的DIoU loss和CIoU loss,以及建议使用DIoU-NMS替换经典的NMS方法,充分地利用IoU的特性进行优化.并且方法能够简单地迁移到现有的算法中带来性能的提 ...
- ECCV 2018 目标检测 | IoU-Net:将IoU的作用发挥到极致
常见的目标检测算法缺少了定位效果的学习,IoU-Net提出IoU predictor.IoU-guided NMS和Optimization-based bounding box refinement ...
- 【目标检测】YOLO:
PPT 可以说是讲得相当之清楚了... deepsystems.io 中文翻译: https://zhuanlan.zhihu.com/p/24916786 图解YOLO YOLO核心思想:从R-CN ...
随机推荐
- learn more ,study less(二):整体性学习技术(下)
随意信息的处理 随意信息,或者内容太多.太复杂的信息,都不容易理解,它们需要不同的技术.假 如你发现联想法不能帮助你理解材料,或者需要花费的时间太长,这时候处理随意信息的方 法就很适合了. 这些处理随 ...
- 模块化系列教程 | 阿里JarsLink1.0模块化场景实战Demo
场景实战Demo使用指引 Quickstart 快速开始 Demo说明 模块说明 使用说明 情景一环境部署 工作原理 情景二环境部署 工作原理 场景实战Demo使用指引 个人之前学习过程中对JarsL ...
- 前端入门nginx
一.nginx是什么 NGINX is a free, open-source, high-performance HTTP server and reverse proxy, as well as ...
- 死磕mysql(3)
花了一个晚上得出的结论,autocommit=1是不是立刻提交,autocommit=0是没有写入数据库的关闭数据,除非遇到commit和rollback........把自己给逗了关闭数据库发现数据 ...
- 红帽RedHat 8.0新特性(网络、yum源、Web界面管理等)
1.Red Hat8 配置静态IP 注意:Red Hat8网络管理默认使用NetworkManager,而不是之前版本的network. 按照之前版本我们一般通过配置文件设置静态IP地址信息,如下: ...
- Codeforces_492_E
http://codeforces.com/problemset/problem/492/E 题目规定了gcd=1,可以在纸上模拟一下,发现每一个起点,都会经历过n个点,n个点都是不同行不同列.可以把 ...
- Codeforces 1050D Three Religions (dp+序列自动机)
题意: 给一个1e5的串str,然后有三个起始空串,不超过1000次操作,对三个字符串的一个尾部加一个字符或者减一个字符,保证每个字符不会超过250 每次操作之后询问你这三个串是不是可以组成str的子 ...
- Linux学习1-云服务器上搭建禅道项目管理工具
前言 相信各位测试的小伙伴出去面试总会被问到:测试环境怎么搭建?一个中级测试工程师还是对测试环境一无所知的话,面试官会一脸鄙视的,今天我给大家介绍一下最简单的环境部署-—如何在云服务器部署禅道环境. ...
- centos下利用phantomjs来完成网站页面快照截图
最近研究了下phantomjs,感觉还是非常不错的. 首先到官网下载一个源码包 http://phantomjs.org/download.html 点击源码包下载如图: 然后在linux下将必要的一 ...
- Python单引号、双引号、三个双引号的区别
单引号与双引号是作用是一样的,都是字符串定界符. 如果字符串里面包含的与边界一样的符号,需要转义符来将该符号转成普通字符,不然编译器会将字符串中的那个单引号或双引号当成字符串的边界. 例如: ‘I d ...