论文阅读 Characterization of Multiple 3D LiDARs for Localization and Mapping using Normal Distributions Transform
Abstract
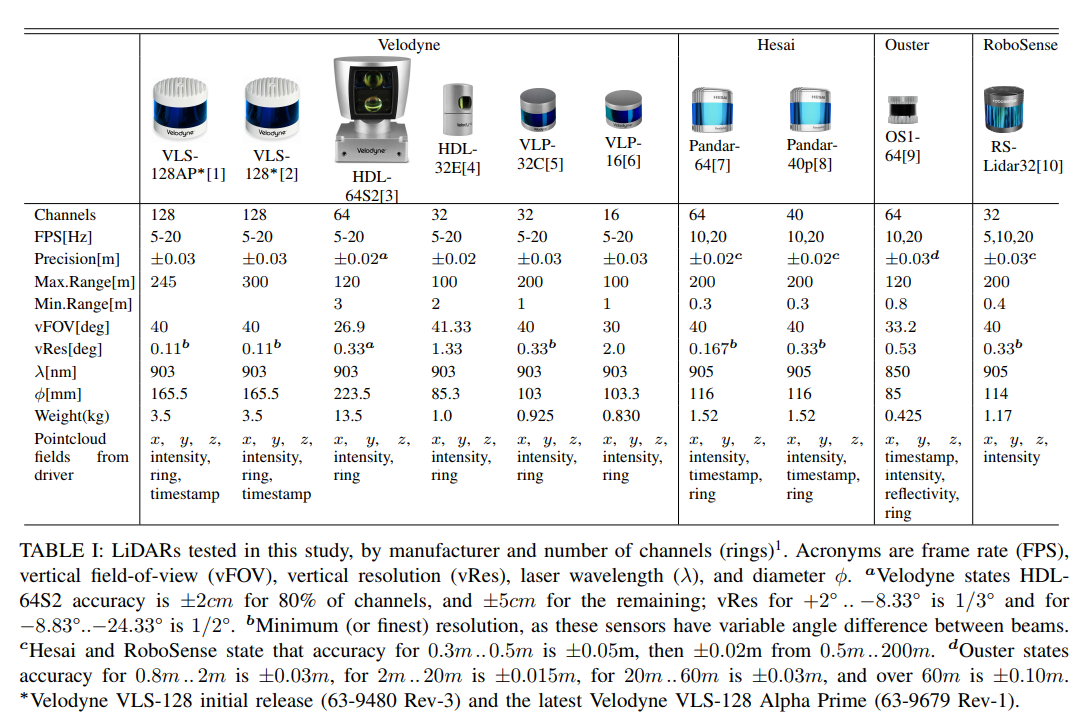
在这个文章里, 我们细致的比较了10种不同的3D LiDAR传感器, 用了一般的 Normal Distributions Transform (NDT) 算法.
我们按以下几个任务来分析表现和特性:
- 按照 mean map entropy 来衡量地图质量
- 6DOF 定位
1. Introduction
Operational design domain: ODD
有几个关键的指标:
- 测量范围
- 测量精度
- 重复性? repeatablity
- point density
- scanning speed
- configurability
- wavelengths
- robustness对于环境变化, 不同的天气
我们用 NDT[16, 17, 18].
贡献如下:
- ..
- 3D地图的评估, 用了 mean map entropy (MME) 和 mean plane variance (MPV) 分数.
2. Normal Distributions Transform
A. NDT Scan Matching
在NDT里, scan (点云) 会被分为 归一的3D格中, 每个体素保留它的 平均和分布, 然后用 正态分布体素来表达正太分布.
按照[16] 的说法, 点云(地图或者是model) $\bold{M} 是 $$M$ 个点 \(x_i = <x_i, y_i, z_i>^T\) 的向量, \(i \in [1...M]\), \(x_k\) 是第k个 ND 体素.
\boldsymbol{p}_{k} &=\frac{1}{M_{k}} \sum_{i=1}^{M_{k}} \boldsymbol{x}_{k i} \\
\boldsymbol{\Sigma}_{k} &=\frac{1}{M_{k}} \sum_{i=1}^{M_{k}}\left(\boldsymbol{x}_{k i}-\boldsymbol{p}_{k}\right)\left(\boldsymbol{x}_{k i}-\boldsymbol{p}_{k}\right)^{\top}
\end{aligned} \tag1
\]
\(t\) 的定义是6DoF的位姿.
\]
当 \(E(X, t)\) 大的时候, 表示输入的点云和地图align的很好. 牛顿非线性函数优化会用于找到 \(t\) 使得 \(E(X, t)\) 最大化. 因此我们最小化函数 \(f(t) = -E(X, t)\). 参数向量 \(t\) 的更新如下:
\]
这里 \(g\) 和 \(H\) 是 f 的偏微分 和 二阶偏微分.
B. NDT Evaluation Metrics
- 迭代:
- Fitness Score
- Transformation Probability
C. NDT Precision and Performance Factors
- 输入点云降采样:
- 参照地图的分辨率:
- VoxelGrid Filter: 跟地图分辨率类似, voxel grid filter 是降采样的方法
- LiDAR Beams 的数量:
- Matching Initialization
3. Multiple LiDAR Dynamic Traffic Data
A. 数据采集
- 三个时间段: 早中晚
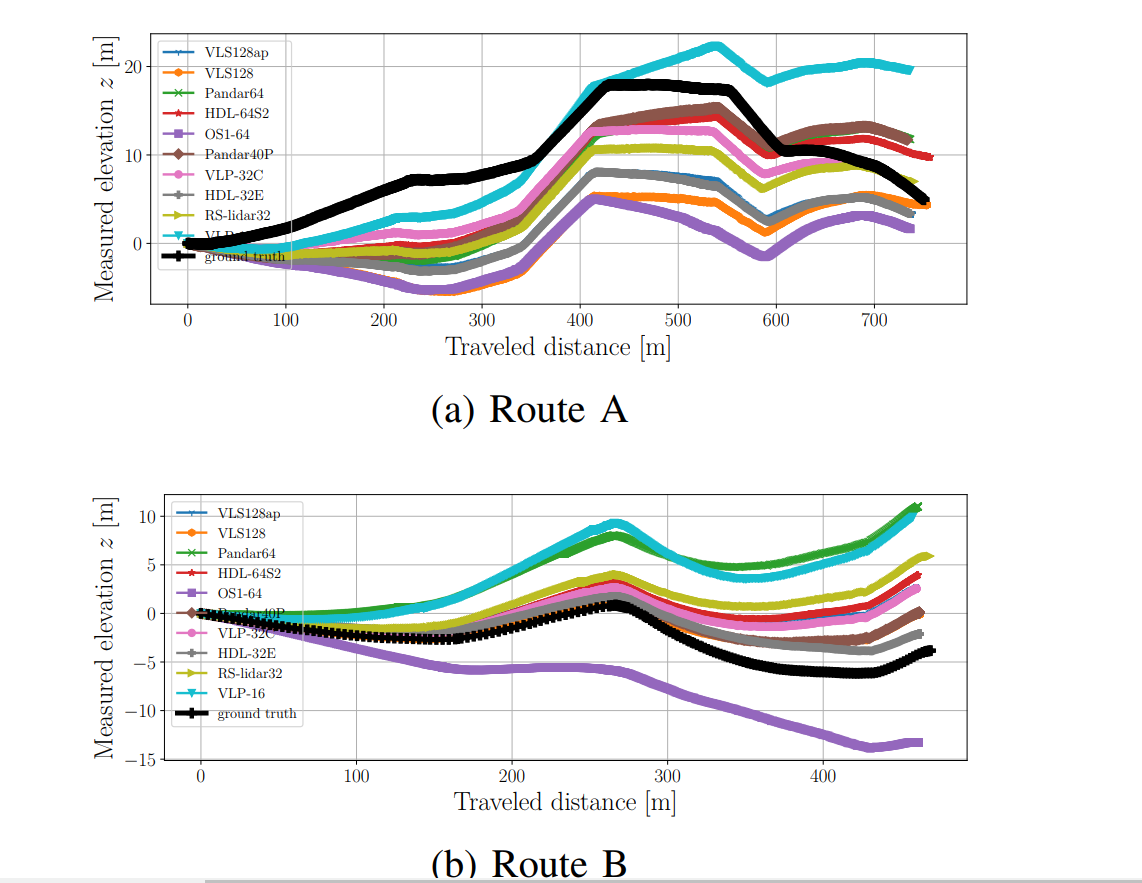
B. Evaluation Routes
- 路线 A: 749m, 比较吓着, 有树, 建筑, 坡道; 最大速度在 30km/h
- 路线 B: 475m, 基本平, 最大速度在 40km/h - 50km/h
- 路线 C: 797m, 最大速度40km/h

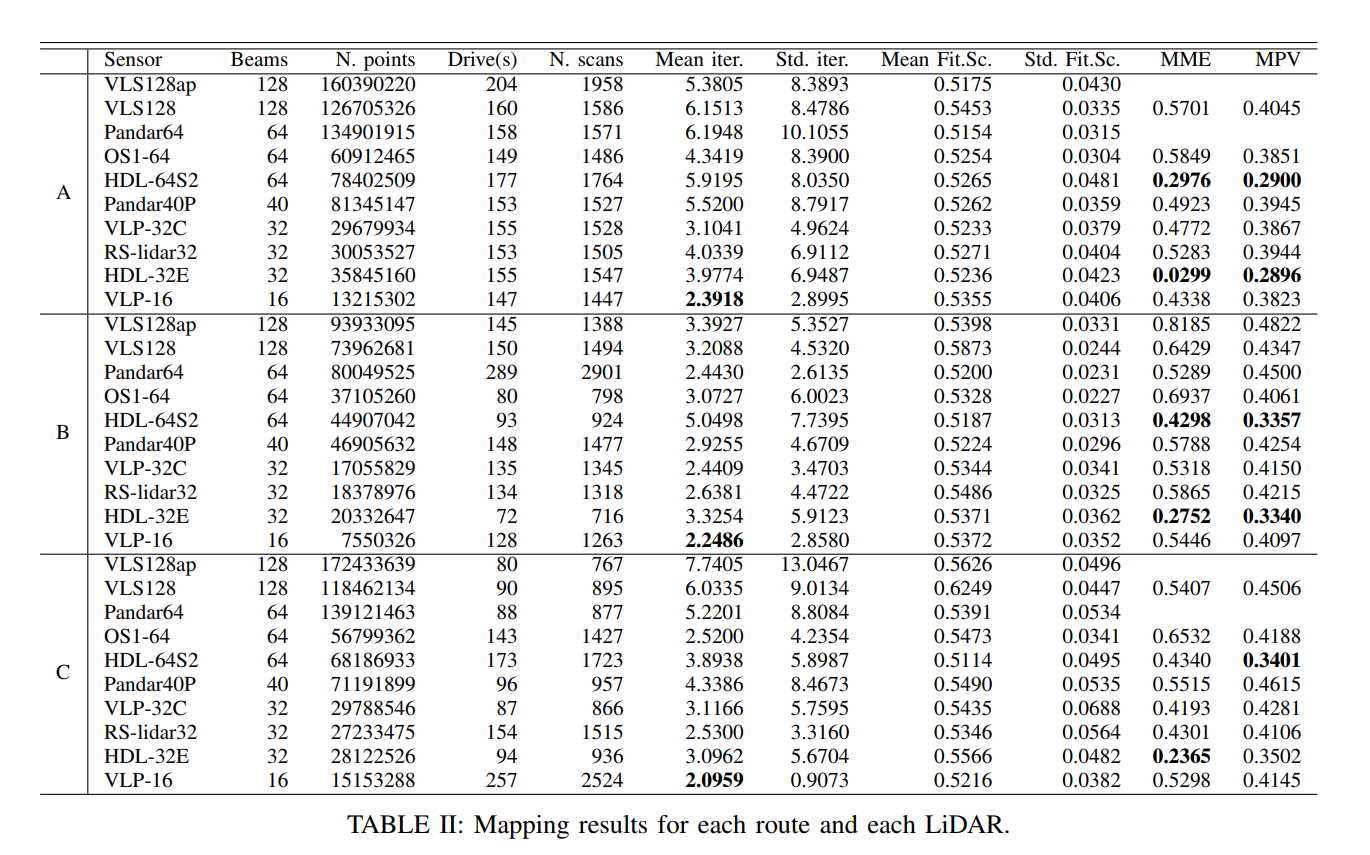
4. Mapping Evaluation
对于每个LiDAR和每条路线, 我们创造了一个3D地图. NDT的分辨率的定义是 1m, 最大迭代数量是50次, 最小范围是 3m, 最大范围是 200m. 最小shift 参数被设定为 1m.
VLP-16 有最低线束 和 OS1-64 有最大的纵向误差.
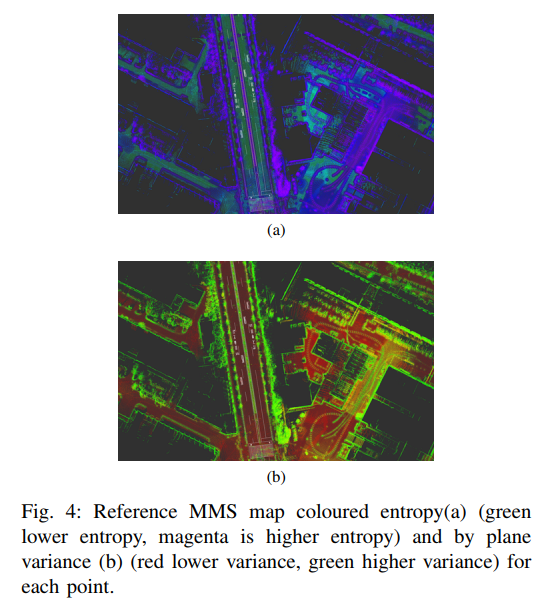
我们也考虑了别的维度来衡量地图质量, 平均地图熵 (mean map entropy MME) 和 mean plane variance (MPV) 在[25]中被讨论过. Mean map entropy 如下:
h\left(\boldsymbol{x}_{k}\right) &=\frac{1}{2} \ln \left|2 \pi e \boldsymbol{\Sigma}\left(\boldsymbol{x}_{k}\right)\right| \\
H(\boldsymbol{M}) &=\frac{1}{M} \sum_{i}^{M} h\left(\boldsymbol{x}_{i}\right)
\end{aligned}
\]
Mean plane variance (MPV) 分数如下:
\]
5. Localization Evaluation
我们用了 体素大小是2m, 最大距离是200m.
跟NDT建图类似, NDT 分辨率是1m, 最大迭代数是50, 误差阈值是1m. 图5展示了不同LiDAR定位时的表现.

6. Conclusion
没啥
论文阅读 Characterization of Multiple 3D LiDARs for Localization and Mapping using Normal Distributions Transform的更多相关文章
- 【CV论文阅读】+【搬运工】LocNet: Improving Localization Accuracy for Object Detection + A Theoretical analysis of feature pooling in Visual Recognition
论文的关注点在于如何提高bounding box的定位,使用的是概率的预测形式,模型的基础是region proposal.论文提出一个locNet的深度网络,不在依赖于回归方程.论文中提到locne ...
- 【医学图像】3D Deep Leaky Noisy-or Network 论文阅读(转)
文章来源:https://blog.csdn.net/u013058162/article/details/80470426 3D Deep Leaky Noisy-or Network 论文阅读 原 ...
- SLAM论文阅读笔记
[1]陈卫东, 张飞. 移动机器人的同步自定位与地图创建研究进展[J]. 控制理论与应用, 2005, 22(3):455-460. [2]Cadena C, Carlone L, Carrillo ...
- 论文阅读:Face Recognition: From Traditional to Deep Learning Methods 《人脸识别综述:从传统方法到深度学习》
论文阅读:Face Recognition: From Traditional to Deep Learning Methods <人脸识别综述:从传统方法到深度学习> 一.引 ...
- 多目标跟踪:CVPR2019论文阅读
多目标跟踪:CVPR2019论文阅读 Robust Multi-Modality Multi-Object Tracking 论文链接:https://arxiv.org/abs/1909.0385 ...
- Action4D:人群和杂物中的在线动作识别:CVPR209论文阅读
Action4D:人群和杂物中的在线动作识别:CVPR209论文阅读 Action4D: Online Action Recognition in the Crowd and Clutter 论文链接 ...
- 论文阅读(Xiang Bai——【PAMI2017】An End-to-End Trainable Neural Network for Image-based Sequence Recognition and Its Application to Scene Text Recognition)
白翔的CRNN论文阅读 1. 论文题目 Xiang Bai--[PAMI2017]An End-to-End Trainable Neural Network for Image-based Seq ...
- BITED数学建模七日谈之三:怎样进行论文阅读
前两天,我和大家谈了如何阅读教材和备战数模比赛应该积累的内容,本文进入到数学建模七日谈第三天:怎样进行论文阅读. 大家也许看过大量的数学模型的书籍,学过很多相关的课程,但是若没有真刀真枪地看过论文,进 ...
- 论文阅读笔记 - YARN : Architecture of Next Generation Apache Hadoop MapReduceFramework
作者:刘旭晖 Raymond 转载请注明出处 Email:colorant at 163.com BLOG:http://blog.csdn.net/colorant/ 更多论文阅读笔记 http:/ ...
随机推荐
- PyQt(Python+Qt)学习随笔:MoviePy视频转GIF动图相关方法介绍
专栏:Python基础教程目录 专栏:使用PyQt开发图形界面Python应用 专栏:PyQt入门学习 老猿Python博文目录 MoviePy能处理的视频是ffmpeg格式的,老猿理解支持的文件类型 ...
- 性能测试学习之路 (四)jmeter 脚本开发实战(JDBC &JMS &接口脚本 & 轻量级接口自动化测试框架)
1.业务级脚本开发 登录脚本->思路:在线程组下新建两个HTTP请求,一个是完成访问登录页,一个是完成登录的数据提交. 步骤如下: 1) 访问登录页 2) 提交登录数据的HTTP PS:对于 ...
- 半夜删你代码队 Day1冲刺
一.团队信息 1.团队项目:Midnight聊天室 2.团队名称:半夜删你代码队 3.队员信息: 职务 项目经理 主开发团队 测试人员 姓名 陈惠霖 周楚池 侯晓龙 余金龙 胡兆禧 林涛 二.Alph ...
- 深入解析volatile关键字
前言 很高兴遇见你~ 欢迎阅读我的文章. volatile关键字在Java多线程编程编程中起的作用是很大的,合理使用可以减少很多的线程安全问题.但其实可以发现使用这个关键字的开发者其实很少,包括我自己 ...
- DarkMode(1):产品应用深色模式分析
为什么Dark Mode变得越来越流行 2018 年的 macOS Mojave 率先支持了深色外观,紧接着 Windows 10 在 2018 年的 10 月份大版本更新中,也引入了 Dark Mo ...
- STL——容器(List)List 的构造函数
list<T> lstT -- list 对象的默认构造 list 与 vector 一样,同样采用模板类实现,对象的默认构造形式:list<T> lstT 如: 1 #in ...
- gnuplot设置字体及大小
set term png font 'times.ttf,14'set fontpath '/home/peter/.fonts'set output 'vel-cost.eps'set gridse ...
- 未雨绸缪,数据保护之NBU介质备份
摘要:华为GaussDB目前已支持NBU介质的备份与恢复,本文主要描述了华为GaussDB数据库和NetBackup对接进行备份.恢复的配置方法与性能调优方法. 一.简介 企业要想避开自然灾难和站点中 ...
- [日常摸鱼]bzoj2823 [AHOI2012]信号塔
题意:$n$个点,求最小圆覆盖,$n \leq 5e5$ 这题数据是随机的hhh 我们可以先求出凸包然后对凸包上的点求最小圆覆盖-(不过直接求应该也行?) 反正随便写好像都能过- #include&l ...
- 浅谈 FHQ-Treap
关于FHQ-Treap --作者:BiuBiu_Miku 可能需要的前置知识: 一.树形结构的了解: 树形,顾名思义,就是像树一样有很多分叉口,而这里以二叉 ...