迅为i.MX6Q嵌入式开发板
工业级核心板:核心板10层高速PCB设计,充分保证电磁兼容。
01. 处理器:开发板默认是四核商业扩展级芯片,可根据用户需求更换单核、双核、工业级、汽车级处理器,批量更省成本。
02. 扩展引脚:320PIN全部引出,扩展更多可能
03. 核心板尺寸说明:长宽尺寸:51mm*61mm 核心板总厚度:2.6mm
板对板连接器:连接器高度仅1.5mm
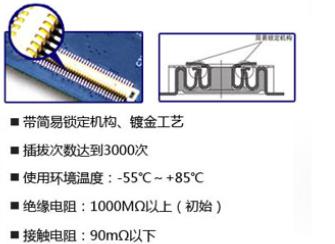
04. 长期稳定运行:实测开发板待机运行1个月不死机。
独当一面的强大功能:底板4层PCB设计,扩展接口丰富。
01. 支持RGB、LVDS信号屏幕及HDMI显示器
迅为创造性的采用HDMI线连接方式,牢固耐用,使用方便并兼容传统的连接方式
支持4.3寸电阻屏幕 分辨率480*272
支持7寸IPS高清屏幕 分辨率1280*800
支持9.7寸IPS屏幕与iPAD2同款屏幕 分辨率1024*768

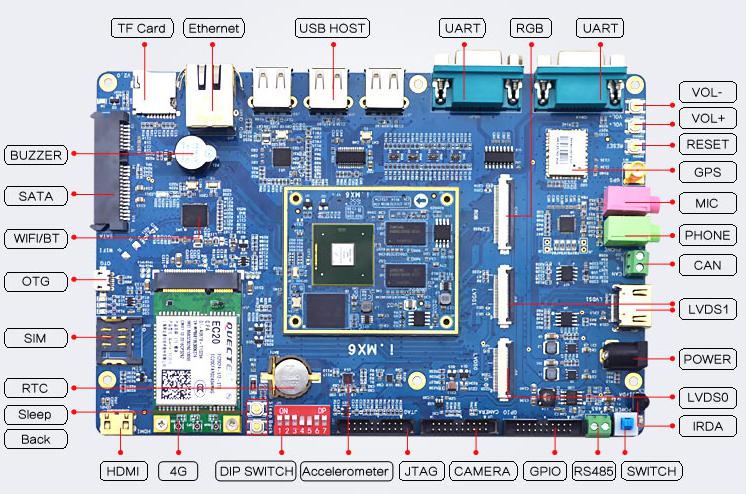
02. 接口特别介绍
支持千兆以太网、SATA
SDIO接口WIFI蓝牙二合一模块
PCIE接口4G全网通模块
GPS模块、CAN总线、RS485总线
1路RGB信号、2路LVDS信号、
支持500万自动对焦摄像头(选配)
GPIO引出 SPI、I2C、CAN 总线等

03. 操作系统:全开源
Android 4.4版本
Linux+QT 4.7 版本
Ubuntu 12.04版本

04. 提供资料:资料源码全提供
光盘资料:原理图(PDF格式)、底板PCB(Allegro格式)、驱动程序源码、芯片和LCD数据手册、开发环境、产品使用手册。
网盘资料:开发所需PC软件(工具)、编译系统所需的工具包等、学习推荐书籍及软件等。
核心板参数
|
尺寸 |
51mm*61mm |
|
CPU |
Freescale Cortex-A9 四核 i.MX6Q,主频 1.2 GHz |
|
内存 |
2GB DDR3 |
|
存储 |
16GB EMMC 存储 |
|
电源管理 |
内部独立 |
|
工作电压 |
5V |
|
系统支持 |
Linux-QT/Android/Ubuntu操作系统 |
|
引角扩展 |
引出脚多达320个,满足用户各类扩展需求 |
|
运行温度 |
-20 ℃到+80 ℃之间,设备工作正常,运行良好! |
底板参数
|
尺寸 |
125mm*190mm |
|
POWER |
电直流电源输入接口,12V/2A电源输入 |
|
SWITCH |
电源开关 |
|
LVDS接口 |
2路 |
|
RGB接口 |
1路 |
|
CAN |
1 路 CAN 总线接口 |
|
MIC |
支持MIC输入 |
|
PHONE |
支持耳机输出 |
|
RESET |
1个复位按键 |
|
串口 |
2路串口 |
|
USB HOST |
3路 |
|
网口 |
1 路千兆以太网,RJ45 接口 |
|
TF卡 |
1个 |
|
SATA |
1 个 SATA 接口 |
|
WIFI蓝牙 |
支持 |
|
GPS模块 |
支持(选配) |
|
OTG |
1路 |
|
SIM卡槽 |
1个 |
|
4G模块 |
全网通(选配) |
|
HDMI接口 |
标准HDMI v1.4,1080p高清分辨率输出 |
|
RS485 |
1个 |
|
IRDA |
1个 |
|
DIP SWITCH |
1个7位拨码开关 |
|
JTAG |
1个 |
|
CAMERA接口 |
1个支持500万摄像头 |
|
GPIO接口 |
20PIN |
|
按键 |
4 个 |
|
RTC |
实时时钟 |
|
BUZZER |
1个蜂鸣器 |
|
重力加速度计 |
支持 |
店铺:https://arm-board.taobao.com
QQ咨询:2551456065 / 3316251482
迅为i.MX6Q嵌入式开发板的更多相关文章
- ARM嵌入式开发板
iTOP-4412 ARM嵌入式开发板----主要特点 iTOP-4412开发平台是北京迅为电子研发设计的嵌入式开发板平台,核心板配备64位双通道2GB DDR3,16GBEMMC存储,三星原厂S5M ...
- 嵌入式开发板iTOP4412学习开发板
网站:http://www.topeetboard.com 淘宝:https://item.taobao.com/item.htm?_u=okcahs0f42a&id=38712193806 ...
- 学习嵌入式开发板的Android平台体系结构和源码结构
本文转自迅为论坛资料:http://www.topeetboard.com 推荐学习嵌入式开发板平台:iTOP-4412开发板 下面这张图出自Google官方,展示了Android系统的主要组成部分. ...
- 嵌入式开发板使用网口和nfs进行文件共享
如果你的开发板有网口,类似于这玩意. 那么,你可以去买根网线,类似于这玩意. 然后你就可以将你的电脑和开发板用网线连起来,通过nfs(网络文件系统)来进行文件夹共享,文件夹共享就相当于挂载,nfs是利 ...
- CLion远程调试嵌入式开发板程序
CLion远程调试嵌入式开发板程序 目录 CLion远程调试嵌入式开发板程序 1. 目的 2. 前提条件 3. CLion设置 3.1 设置一个Deployment 3.2 上传需要的目录到目标板子 ...
- 【嵌入式开发板】8月终极暑促迅为Cortex-a9四核入门开发板
核心板参数 尺寸 50mm*60mm 高度 连同连接器在内0.26cm CPU Exynos4412,四核Cortex-A9,主频为1.4GHz-1.6GHz 内存 1GB 双通道 DDR3(2GB ...
- 迅为嵌入式开发板iTOP-6818开发板八核Cortex-A53架构,满足各种产品需求
性价比更高 内存:1G(可选2G);存储:16G;4418:四核 Cortex-A9;6818:八核Cortex-A53. 功能更强 板载4G(全网通),GPS,WIFI,千兆以太网,重力加速度计等, ...
- 迅为iTOP-4418嵌入式开发板初体验
iTOP-4418开发板预装 Android4.4.4 系统, 支持9.7 寸.7 寸.4.3 寸屏幕. 参数:核心板参数 尺寸 50mm*60mm高度 核心板连接器为1.5mmCPU ARM Cor ...
- 【4412嵌入式开发板学习笔记】认识uboot
转自迅为讨论群:http://www.topeetboard.com 重要说明:这份笔记不是4412开发配套的,是我在网上看视频的时候下载上课老师的笔记后修改的.所以我试了一下笔记上的uboot命令, ...
随机推荐
- SprigMVC基础测试
创建POJO package org.entity; public class User { private int id; private String userName; private Stri ...
- java操作json
import net.sf.json.JSONArray; import net.sf.json.JSONObject; public class ReadJson { public static v ...
- 双系统xp和ubuntu,删除ubuntu
1:下载MbrFix.exe 2:进入c盘,命令MbrFix /drive 0 fixmbr
- varint算法——本质上是牺牲最高位作为标识数据结束位,达到变长编码,说白了就是贪心的分割位
varint算法,摘自:http://blog.csdn.net/liaoquesg/article/details/50897327 最近在看<大规模WEB服务开发技术>这本书中.书中提 ...
- I.MX6 MAC Address 导致的系统崩溃
/**************************************************************************** * I.MX6 MAC Address 导致 ...
- URAL2104. Game with a Strip(博弈)
There is a strip 1 × n with two sides. Each square of the strip (their total amount is 2n, n squares ...
- JSP指令--include指令(静态包含)
转自:https://blog.csdn.net/chentiefeng521/article/details/51802319 include指令 include指令是文件加载指令, ...
- 【412】Linux 系统编译 C 程序
1. 直接编译,会自动生成 a.out 文件,此文件即为可执行文件 # 编译 *.c 文件,生成可执行文件 a.out gcc euclide.c # 直接运行如下,如果没有输入和输出文件的话 # & ...
- asp.net web.config配置节说明(转发)
原文地址:http://www.cnblogs.com/qingyuan/articles/1501644.html web.config 文件查找规则: (1)如果在当前页面所在目录下存在 ...
- An internal error occurred during: "Launching MVC on Tomcat 6.x". java.lang.NullPointerException
有的时候打开Myeclispe莫名奇妙的就出现了这样的问题: An internal error occurred during: "Launching MVC on Tomcat 6.x ...