工作笔记——CPLD与MCU通过SPI通信
一、需求描述
- MCU需要接收来自CPLD的升级固件数据
- CPLD对MCU只进行发送数据,不接收MCU的数据
- CPLD无法告知数据传输的开始和结束,需要MCU自行判断(CPLD只是数据透传,不做数据判断)
- 数据通信速率至少是UART通信的115200波特率
- PCB上MCU与CPLD之间通过3个普通IO引脚连接
二、功能分析
MCU与CPLD之间有3根线,那么可以选择UART通信或者SPI通信方式。
由于CPLD无法通知MCU数据传输的开始与结束,MCU需要自行判别,那么MCU可以通过中断方式来检测数据传输的开始,通过超时来检测数据传输的结束。
UART与SPI的区别在于前者是异步通信后者是同步通信方式,不论是SPI还是UART方式都需要MCU通过IO模拟方式软件实现。使用UART传输如果收发双方产生的波特率存在偏差则会导致数据传输出错,而同步传输方式有时钟信号的约束,相比异步传输方式数据准确率会更高。如果使用软件模拟UART,需要使用定时器作为波特率发生器。如果波特率比较高,那么定时器中断频率就需要更高,这样会影响整个MCU系统的实时性。综合考虑后选择SPI方式。
CPLD对MCU只发送数据,那么MCU只需要作为SPI的从机即可,三个IO分配为SPI的CS、CLK、DAT引脚。
由于CS是低电平有效,那么将CS引脚配置为中断输入方式,当CS中断触发后开始数据接收处理。因为CPLD也不知道数据传输什么时候结束,所以无法通过将CS置高电平来告诉数据传输的结束,那么CS置高电平只能表明一个字节传输结束。MCU可以通过超时方式来判断一包数据的结束,类似于串口的空闲中断方式。
SPI数据接收在外部中断中操作。将CLK引脚配置为外部中断的
上升沿触发,CS有效的情况下CLK中断触发后进行数据接收。SPI空闲中断采用100us周期定时器判断。为了MCU系统的实时性,只有CS中断触发后才会开启定时器,超时判断完成后关闭定时器。
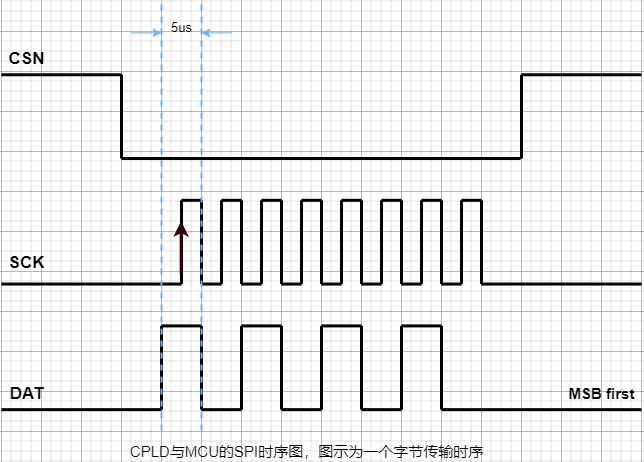
CPLD向MCU发送一字节的时序图如下(速率:200KBit/s):
三、软件实现
GPIO的配置:无数据CLK为低电平,CS低有效。CS上升沿、下降沿都会触发中断,判断1字节传输的起始与结束;CLK上升沿触发中断,数据在CLK上升沿采样
/*
***********************************************************************************************
* 函 数: BSP_CPLD_GPIO_Init
* 描 述: 配置CPLD的SPI通信引脚
* 输 入: 无
* 输 出: 无
***********************************************************************************************
*/
void BSP_CPLD_GPIO_Init(void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
/* GPIO Ports Clock Enable */
CPLD_PIN_CLK_ENABLE();
/*Configure GPIO pin : PtPin */
GPIO_InitStruct.Pin = CPLD_SPI_CSN_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING_FALLING;
GPIO_InitStruct.Pull = GPIO_PULLUP;
HAL_GPIO_Init(CPLD_SPI_CSN_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = CPLD_SPI_SCK_PIN;
GPIO_InitStruct.Mode = GPIO_MODE_IT_RISING;
GPIO_InitStruct.Pull = GPIO_PULLDOWN;
HAL_GPIO_Init(CPLD_SPI_SCK_PORT, &GPIO_InitStruct);
GPIO_InitStruct.Pin = CPLD_SPI_DAT_PIN;
GPIO_InitStruct.Pull = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(CPLD_SPI_DAT_PORT, &GPIO_InitStruct);
}
CPLD_SPI_CS外部中断函数:用于使能数据接收、空闲检测
/*
***********************************************************************************************
* 函 数: CPLD_CS_EXTI_IRQHandler
* 描 述: CPLD_SPI_CS中断函数
* 输 入: 无
* 输 出: 无
***********************************************************************************************
*/
void CPLD_CS_EXTI_IRQHandler(void)
{
if (__HAL_GPIO_EXTI_GET_IT(CPLD_SPI_CSN_PIN))
{
if (READ_BIT(CPLD_SPI_CSN_PORT->IDR, CPLD_SPI_CSN_PIN))
{
/* CS高失能SPI数据接收 */
CLEAR_BIT(g_tCpldSpi.ucState, CPLD_FLAG_CSN);
}
else
{
/* CS低使能SPI数据接收 */
s_tCpldSpi.ucByte = 0;
s_tCpldSpi.ucBitCount = 0;
SET_BIT(g_tCpldSpi.ucState, CPLD_FLAG_CSN);
/* 开启空闲检测 */
if (0 == s_tCpldSpi.ucIdleCheck)
{
s_tCpldSpi.ucIdleCheck = 1;
HAL_TIM_Base_Start_IT(&Tim7Handle);
}
}
__HAL_GPIO_EXTI_CLEAR_IT(CPLD_SPI_CSN_PIN);
}
}
CPLD_SPI_SCK外部中断函数:用于SPI数据的接收
/*
***********************************************************************************************
* 函 数: CPLD_SCK_EXTI_IRQHandler
* 描 述: CPLD_SPI_SCK中断函数
* 输 入: 无
* 输 出: 无
***********************************************************************************************
*/
void CPLD_SCK_EXTI_IRQHandler(void)
{
if (__HAL_GPIO_EXTI_GET_IT(CPLD_SPI_SCK_PIN))
{
/* CSN有效则进行数据接收 */
if (READ_BIT(g_tCpldSpi.ucState, CPLD_FLAG_CSN))
{
if (READ_BIT(CPLD_SPI_DAT_PORT->IDR, CPLD_SPI_DAT_PIN))
{
s_tCpldSpi.ucByte |= (0x80 >> s_tCpldSpi.ucBitCount);
}
else
{
s_tCpldSpi.ucByte &= ~(0x80 >> s_tCpldSpi.ucBitCount);
}
/* 收满一字节后存向接收FIFO */
if (++s_tCpldSpi.ucBitCount > 7)
{
g_tCpldSpi.ucaRxBuf[g_tCpldSpi.usRxWrite] = s_tCpldSpi.ucByte;
if (++g_tCpldSpi.usRxWrite >= 1024)
{
g_tCpldSpi.usRxWrite = 0;
}
if (g_tCpldSpi.usRxCount < CPLD_SPI_RX_BUF_LEN)
{
g_tCpldSpi.usRxCount++;
}
/* SPI收到新数据,设置一个标记,供应用程序查询 */
SET_BIT(g_tCpldSpi.ucState, CPLD_FLAG_RXNE);
}
}
__HAL_GPIO_EXTI_CLEAR_IT(CPLD_SPI_SCK_PIN);
}
}
定时器中断函数:判断CPLD_SPI空闲中断的发生
/*
***********************************************************************************************
* 函 数: TIM7_IRQHandler
* 描 述: 定时器7中断函数,100us中断周期
* 输 入: 无
* 输 出: 无
***********************************************************************************************
*/
void TIM7_IRQHandler(void)
{
static uint16_t t100us_cnt = 0;
if (__HAL_TIM_GET_FLAG(&Tim7Handle, TIM_FLAG_UPDATE) &&
__HAL_TIM_GET_IT_SOURCE(&Tim7Handle, TIM_IT_UPDATE))
{
/* CPLD-SPI空闲检测,1ms */
if (READ_BIT(g_tCpldSpi.ucState, CPLD_FLAG_CSN))
{
t100us_cnt = 0;
}
else
{
t100us_cnt++;
}
if (t100us_cnt > 10)
{
/* SPI收到一帧数据,设置一个标记,供应用程序查询 */
SET_BIT(g_tCpldSpi.ucState, CPLD_FLAG_IDLE);
#if ENABLE_RTOS
tx_event_flags_set(&tx_event_flags, TX_EVENT_CPLD_SPI_IDLE, TX_OR);
#endif
s_tCpldSpi.ucIdleCheck = 0;
HAL_TIM_Base_Stop_IT(&Tim7Handle);
}
__HAL_TIM_CLEAR_IT(&Tim7Handle, TIM_IT_UPDATE);
}
}
四、功能验证
经多次发送固件数据验证,MCU均能正常接收数据,并且没有出现数据错误的情况,可用于该项目。
五、拓展
该方法也可以用于实现模拟UART功能,仅提供思路,未经过验证(以115200,8-N-1为例)。
- 将UART的接收引脚配置为上拉模式、下降沿触发中断(判断起始位)。
- 中断第一次触发后表明收到起始位,收到起始位后打开定时器中断(如果波特率为115200,那么中断周期应小于8.6us,如果每Bit数据需要多次采样,则需要更短的中断周期)。
- 每中断一次判断一次数据引脚,数据收满10Bit后判断是否为停止位,若数据接收正确则存入接收FIFO。
- 在收到起始位后开始计时,1ms内没有再次收到起始位则认为收到一帧数据,产生软空闲中断,然后关闭定时器。
使用该UART方式优势在于比SPI方式使用更少的引脚,只需要1个IO即可完成通信。缺点在于如果要求通信速率高或需要多次采样,那么产生波特率的定时器中断频率高,如果被其他更高优先级中断打断可能造成波特率不准,数据错误。还有就是UART方式在数据通信速率上没有SPI有优势。不到万不得已不建议使用软件UART方式。
工作笔记——CPLD与MCU通过SPI通信的更多相关文章
- SPI通信
SPI是由Motorola公司提出的一种同步串行外围接口:它在速度要求不高,低功耗,需要保存少量参数的智能化传感系统中得到了广泛应用: SPI是一个全双工的同步串行接口,在数据传输过程中,总线上只能是 ...
- 关于SPI通信原理与程序实现
第一次接触SPI是因为当时用到NRF24L01,需要用SPI进行通信.因为2401上面写着MOSI.MISO.SS.RST,当时以为只要用到SPI就肯定有这几个引脚,以至于限制了自己的思维.只认识MI ...
- [转]SPI通信原理简介
[转自]http://www.cnblogs.com/deng-tao/p/6004280.html 1.前言 SPI是串行外设接口(Serial Peripheral Interface)的缩写.是 ...
- ESP8266开发之旅 基础篇⑤ ESP8266 SPI通信和I2C通信
设备与设备之间的通信往往都伴随着总线的使用,而用得比较多的就当属于SPI总线和I2C总线,而恰巧NodeMcu也支持这两种总线通信,所以本章的主要内容就是讲解ESP8266 SPI和I2C总线 ...
- ESP8266 SPI通信
设备与设备之间的通信往往都伴随着总线的使用,而用得比较多的就当属于SPI总线和I2C总线,而恰巧NodeMcu也支持这两种总线通信 1. SPI总线——SPI类库的使用 SPI是串行外设接口(Seri ...
- 理解一下单片机的I2C和SPI通信
应某位网友要求,今天说一下单片机的I2C SPI通信,可能说不清楚,因为这毕竟要做实验才可完全理解. I2C和SPI是两种不同的通信协议. 听到协议,似乎高不可攀,其实协议就是人们定义的一个标准而已, ...
- 2016年第2周读书笔记与工作笔记 scrollIntoView()与datalist元素
这一周主要是看了html5网页开发实例与javascript 高级程序设计,供以后翻阅查找. html5网页开发实例第1章与第二章的2.1部分: 第1章内容: html5在w3c的发展史. 浏览器的 ...
- SPI通信实验---verilog(FPGA作为从机,使用可读可写)
本实验讲究实用性,故设计思想为:主机先向从机发送地址,若是向从机写入数据,则向从机发送数据,若是读取从机数据,则向从机发送时钟,然后在时钟下降沿读取数据即可.cs信号上升沿作为SPI通信的结束信号.r ...
- javascript - 工作笔记 (事件四)
在javascript - 工作笔记 (事件绑定二)篇中,我将事件的方法做了简单的包装, JavaScript Code 12345 yx.bind(item, "click&quo ...
随机推荐
- Springboot 完整搭建快速入门,必看!
前言 手把手教你Springboot微服务项目搭建快速入门,通过本文学习Springboot的搭建快速入门,掌握微服务大致的配置服务,后续将会继续将核心组件引入到项目中,欢迎关注,点赞,转发. Spr ...
- 数据恢复当选EasyRecovery,设备不再受限
我们在逐渐适应信息电子化的同时,也有一些潜在的麻烦接踵而来,其中较为常见的就是文件和数据的保存问题. 显然,设备的存储空间是有限的,这就不可避免地会出现数据被删除.覆盖或丢失的现象,如果丢失的是重要数 ...
- 攻克solo第五课(Mixolydian 音阶)
相对于独奏来说,我们已经说过了很多关于solo或独奏的乐理和技巧.那么这篇文章,笔者将使用guitar pro7软件来跟大家分享Mixolydian 音阶的演奏技巧,以及如何在学习Mixolydian ...
- 如何用FL Studio将乐器组合与分层
有过音乐制作经历的小伙伴应该知道,我们在用以FL Studio20为代表的音乐编曲软件制作音乐时,往往需要在同一节奏点添加多种音效,这样可以使音乐听起来更具层次感.正因如此,我们就需要不断添加音符,就 ...
- EDI的五个常见挑战以及如何克服这些挑战
EDI是成功进行供应链管理的一个关键要素.它使企业能够以标准化的电子格式处理与任何交易伙伴的业务数据交换,极大简化了许多曾经繁琐的程序.然而,如果企业正在扩张或处于高速增长阶段,如何充分利用EDI仍然 ...
- C语言讲义——结构体struct
结构体是一种变量类型,可以包含多个变量(变量类型不必相同). 结构体的关键字是struct也是一种值类型. 例:设计一个表示"书本"的结构体: structBook { chari ...
- k8s集群部署rabbitmq集群
1.构建rabbitmq镜像 RabbitMQ提供了一个Autocluster插件,可以自动创建RabbitMQ集群.下面我们将基于RabbitMQ的官方docker镜像,添加这个autocluste ...
- spring与分布式事务
转载:https://www.cnblogs.com/qianjun2017/p/8349829.html 转载:https://blog.csdn.net/jaryle/article/detail ...
- IEEE浮点数标准
IEEE浮点数标准 阅读笔记:Computer System : A Programmmer's Perspective 基本概念 IEEE浮点数标准采用 \[V=(-1)^s\times M\tim ...
- JZOJ2020年8月14日提高组反思
JZOJ2020年8月14日提高组反思 T1 看到题 一脸:我是谁,我在哪,我要干啥 看到字符串凉一半 还有查询修改 想到线段树但不会建模 暴力安排 T2 一开始觉得:水题 然后啪啪打脸 空间小,数据 ...