PIE SDK归一化水体指数法
1.算法功能简介
归一化指数法(NDWI(Normalized Difference Water Index,归一化水指数)),用遥感影像的特定波段进行归一化差值处理,以凸显影像中的水体信息。
其表达式为NDWI =(p(Green)-p(NIR))/(p(Green)+p(NIR))
是基于绿波段与近红外波的归一化比值指数。该NDWI一般用来提取影像中的水体信息,效果较好。
PIE支持归一化指数法算法的执行,下面对此算法功能进行介绍。示例以一幅洞庭湖2017年水体影像图如下图根据矢量文件提取指定范围内的水体数据为例。结果看示例截图部分。

2.算法功能实现说明
2.1 实现步骤
|
第一步 |
算法参数设置 |
|
第二步 |
算法执行 |
|
第三步 |
结果显示 |
2.2 算法参数
|
算法名称 |
归一化水体指数算法 |
|
|
C#算法DLL |
PIE.CommonAlgo.dll |
|
|
C#算法名称 |
PIE.CommonAlgo.DataAutoMagicAlgo |
|
|
参数结构体 |
DataAutoMagic_Exchange_Info |
|
|
参数说明 |
||
|
InputFilePathList |
IList<string> |
输入文件路径列表 |
|
OutputFilePath |
String |
输出文件路径 |
|
ShpFilePath |
String |
范围路径 |
|
Type |
Int |
自动提取类型,默认是0 |
2.3 示例代码
|
数据路径 |
百度云盘地址下/ PIE示例数据/栅格数据/01.GF1/洞庭湖水体/ IMG_FE233_20171219_636493846049962321.tif SHP_FE233_20171219_636493846049962321.shp |
|
视频路径 |
百度云盘地址下/PIE视频教程/10.算法调用/行业应用/归一化指数算法.avi |
|
示例代码 |
|
/// <summary> |
|
2.4 示例截图
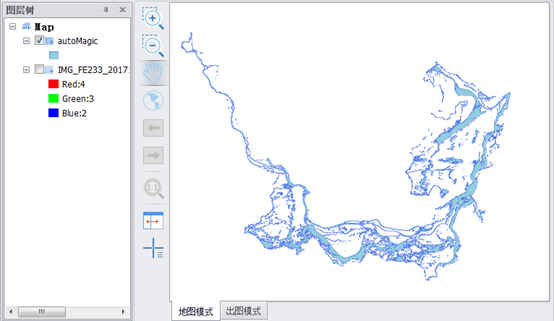
/// <summary>/// 归一化水体指数法/// </summary>public void NormalizeWaterExtract(){ // 归一化水体指数分类 PIE.CommonAlgo.DataAutoMagic_Exchange_Info info = new DataAutoMagic_Exchange_Info(); info.InputFilePathList = new List<string> {@"D:\MapData\Raster\水体提取数据\WR_20171219_A0303_636493863981864520\IMG_FE233_20171219_636493846049962321.tif" };//输入文件列表 info.OutputFilePath = @"D:\MapData\Raster\水体提取数据\temp\autoMagic.shp ";//输出文件路径 注意是矢量文件 info.ShpFilePath = @"D:\MapData\Raster\水体提取数据\WR_20171219_A0303_636493863981864520\SHP_FE233_20171219_636493846049962321.shp";//矢量范围路径 info.Type = 0;//自动提取类型 默认0 PIE.SystemAlgo.ISystemAlgo algo = PIE.SystemAlgo.AlgoFactory.Instance().CreateAlgo("PIE.CommonAlgo.dll","PIE.CommonAlgo.DataAutoMagicAlgo"); if (algo == null) return; algo.Name = "归一化水体指数分类"; algo.Params = info; bool result = PIE.SystemAlgo.AlgoFactory.Instance().ExecuteAlgo(algo); if (result) { MessageBox.Show("归一化水体指数分类算法执行成功"); ILayer layer = LayerFactory.CreateDefaultLayer(info.OutputFilePath); if (layer == null) return; m_HookHelper.ActiveView.FocusMap.AddLayer(layer); m_HookHelper.ActiveView.PartialRefresh(ViewDrawPhaseType.ViewAll); }}
PIE SDK归一化水体指数法的更多相关文章
- PIE SDK水体指数法
1.算法功能简介 单波段阈值法是通过选择某单一波段为判识参数,这一波段往往是水体特征最明显而其它地物相对不太突出的波段(如近红外波段和中红外波段),然后再划定阈值来确定水体信息.该方法主要是利用水体在 ...
- PIE SDK Command&&Tool工具命令一览表
PIE SDK Command&&Tool工具命令一览表 编号 模板 名称(中文) Command&Tool 程序集 备注 1 数据管理 加载栅格数据 PIE.Controls ...
- PIE SDK水深提取算法
1.算法功能简介 水深提取算法就是根据输入的水位设为d,dem设为h 这两个数据做一个差值运算,则水深计算公式为d-h;本示例中的是基于洞庭湖提取的水体矢量文件的范围来计算dem和水位25米的差值. ...
- PIE SDK 距离分类和最大似然分类
1.算法功能简介 监督分类,也叫训练场地法.训练分类法,是遥感图像分类的一种,用被确认类别的样本像元去识别其他未知类别像元的过程.监督分类算法有平行算法.平行六面体法.最小距离法.最大似然法.马 ...
- PIE SDK波段运算
1.算法功能简介 波段运算(Band Math)工具能够方便的执行图像中的各个波段的加减乘除.三角函数.指数.对数等数学函数计算,也可以使用IDL编写的函数. 由于每个用户都有独特的需求,利用此工具用 ...
- PIE SDK频率域滤波
1.算法功能简介 频率域滤波的基本工作流程为:空间域图像的傅里叶变换→频率域图像→设计滤波器→傅里叶逆变换→其他应用. 低通滤波,对频率域的图像通过滤波器削弱或抑制高频部分而保留低频部分的滤波方法,可 ...
- PIE SDK同态滤波
1.算法功能简介 同态滤波是减少低频增加高频,从而减少光照变化并锐化边缘或细节的图像滤波方法. 同态滤波的流程为:空间域图像→对数运算→傅里叶正变换→同态滤波――傅里叶逆变换→指数运算→同态滤波结果. ...
- PIE SDK 文章目录索引
1.PIE SDK介绍 1.1. PIE软件介绍 1.2. PIE SDK介绍 1.3. PIE支持项目介绍 1.4. PIE.NET-SDK插件式二次开发介绍 1.5. PIE.NET-S ...
- PIE SDK与OpenCV结合说明文档
1.功能简介 OpenCV是基于BSD许可(开源)发行的跨平台计算机视觉库,可以运行在Linux.Windows.Android和Mac OS操作系统上.它轻量级而且高效——由一系列 C 函数和少量 ...
随机推荐
- Linux驱动开发常用调试工具---之内存读写工具devmem和devkmem【转】
转自:https://blog.csdn.net/gatieme/article/details/50964903 版权声明:本文为博主原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原 ...
- Python 简易的异步协程使用方法
代码 import asyncio async def ex(id, n): print(id+" start") await asyncio.sleep(n/2) print(i ...
- Uniform Buffer
Uniform Buffer 是一个很有用的缓存,可以将大量的需要传递至多个着色器的矩阵.向量数据等存储在uniform buffer中.这是一个公共的缓存,所以当多个着色器需要传递相同的数据时,可以 ...
- 3.1 Spark概述
一.Spark简介 1.Spark的特点 特点1:运行速度快(内存计算,循环数据流.有向无环图设计机制) 把所有针对数据集的操作转换成一张有向无环图,整个执行引擎调度都是基于这个有向无环图,对这个有向 ...
- 通过fiddler抓包,用jmeter实现multipart/form-data类型请求
Fiddler抓包结果如下: 1.multipart/form-data的基础方式是post,也就是说通过post组合方式来实现的.2.multipart/form-data于post方法的不同之处在 ...
- 代码审计-strpos数组绕过
<?php $flag = "flag"; if (isset ($_GET['ctf'])) { if (@ereg ("^[1-9]+$", $_GE ...
- Netty4的介绍(一)
Netty是由JBOSS提供给的一个java开源框架.Netty提供异步的.事件驱动的网络应用框架和工具,用以快速开发高性能.高可靠的网络服务器和客户端程序. 也就是说,Netty是一个基于NIO的客 ...
- shell的变量以及常见符号
shell的变量以及常见符号 常见变量 不同于其它语言需要先声明变量,shell的变量直接使用 eg: a=15 调用变量的话 $a 或者 ${a} $? #判断上一条命令执行的是否成功 0 ...
- zz 机器学习系统或者SysML&DL笔记
机器学习系统或者SysML&DL笔记(一) Oldpan 2019年5月12日 0条评论 971次阅读 1人点赞 在使用过TVM.TensorRT等优秀的机器学习编译优化系统以及Py ...
- Redis笔记1-Redis介绍及数据类型使用场景
Redis介绍:C语言开发.单线程操作.高性能.键值对.可持久化的数据库.Redis采用redisObject结构来统一五种数据类型,redisObject是五种类型的父类,可以在函数间传递时隐藏具体 ...