ORB-SLAM(四)追踪
最近在读ORB-SLAM的代码,虽然代码注释算比较多了,但各种类和变量互相引用,看起来有点痛苦。索性总结了一下Tracking部分的代码结构,希望能抓住主要思路,不掉坑里。
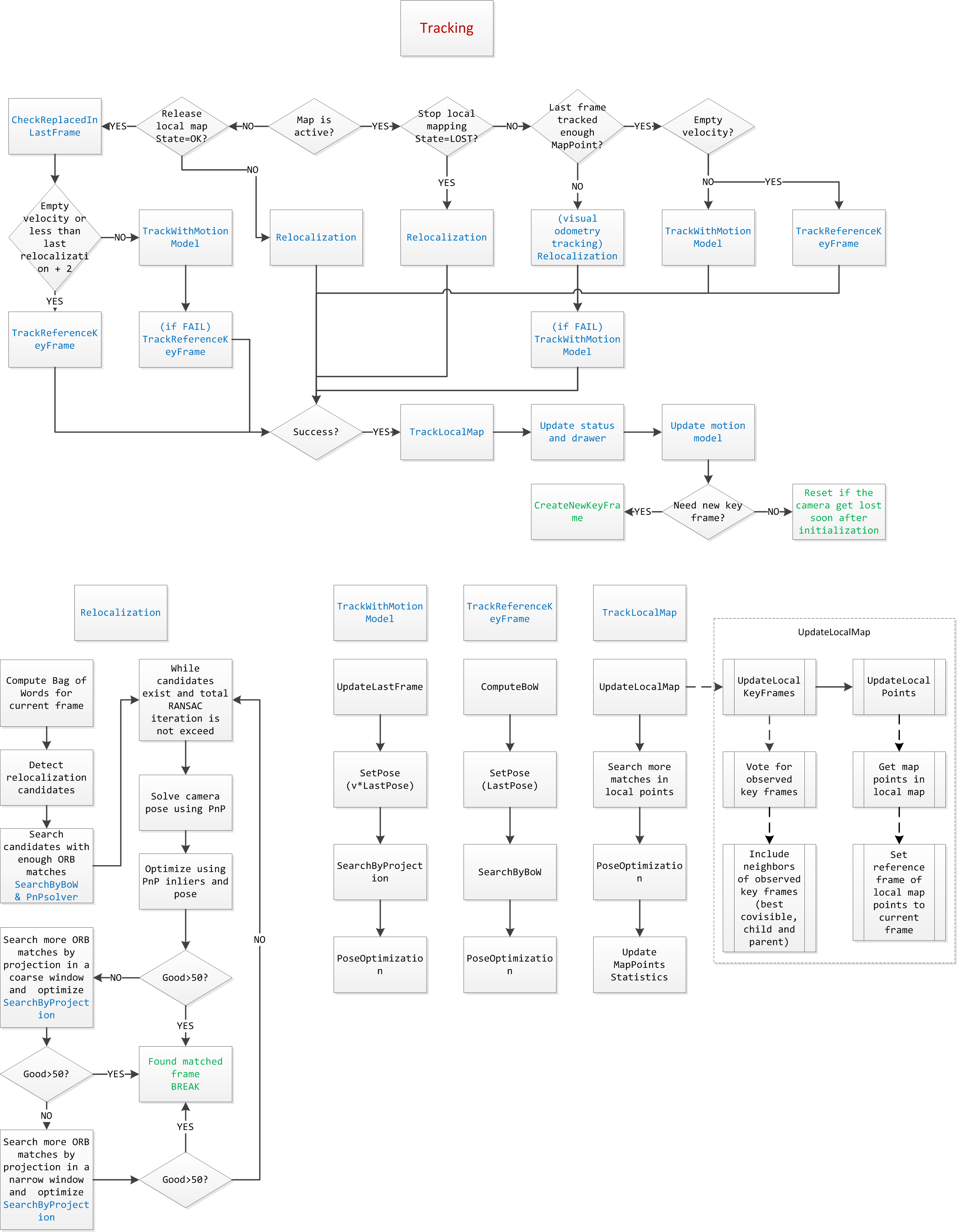
追踪
追踪部分的主要思路是在当前帧和(局部)地图之间寻找尽可能多的对应关系,来优化当前帧的位姿。
作者在追踪这部分主要用了几种模型:运动模型(Tracking with motion model)、关键帧(Tracking with reference key frame)和重定位(Relocalization)。
下面一一介绍。
Tracking with motion model
假设物体处于匀速运动,那么可以用上一帧的位姿和速度来估计当前帧的位姿。上一帧的速度可以通过前面几帧的位姿计算得到。这个模型适用于运动速度和方向比较一致,没有大转动的情形下,比如匀速运动的汽车、机器人、人等。而对于运动比较随意的目标,当然就会失效了。此时就要用到下面两个模型。
Tracking with reference key frame
假如motion model已经失效,那么首先可以尝试和最近一个关键帧去做匹配。毕竟当前帧和上一个关键帧的距离还不是很远。作者利用了bag of words(BoW)来加速匹配。首先,计算当前帧的BoW,并设定初始位姿为上一帧的位姿;其次,根据位姿和BoW词典来寻找特征匹配(参见ORB-SLAM(六)回环检测);最后,利用匹配的特征优化位姿(参见ORB-SLAM(五)优化)。
Relocalization
假如当前帧与最近邻关键帧的匹配也失败了,那么意味着此时当前帧已经丢了,无法确定其真实位置。此时,只有去和所有关键帧匹配,看能否找到合适的位置。首先,利用BoW词典选取若干关键帧作为备选(参见ORB-SLAM(六)回环检测);其次,寻找有足够多的特征点匹配的关键帧;最后,利用特征点匹配迭代求解位姿(RANSAC框架下,因为相对位姿可能比较大,局外点会比较多)。如果有关键帧有足够多的内点,那么选取该关键帧优化出的位姿。
更新局部地图
Tracking成功以后,需要更新motion model,并判断当前帧是否是新的关键帧。如果是,将其加入并更新局部地图(local map),建立当前关键帧与其它关键帧的连接关系,更新当前关键帧与其它关键帧之间的特征点匹配关系,并利用三角法生成新的三维点,最后做一个局部优化(local BA,包括相邻关键帧和它们对应的三维点,参见ORB-SLAM(五)优化)。
如果读者对作者的程序有兴趣,那么可以参照下图来阅读追踪这部分的程序。
该系列的其它文章:
ORB-SLAM(四)追踪的更多相关文章
- [SLAM] 01 "Simultaneous Localization and Mapping" basic knowledge
发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发信站: 水木社区 (Thu Jun 16 19:18:24 2016), 站内 ...
- [SLAM] 01. "Simultaneous Localization and Mapping"
本篇带你认识SLAM,形成客观的认识和体系 一.通过行业招聘初步了解SLAM 发信人: leecty (Terry), 信区: ParttimeJobPost标 题: 创业公司招SLAM 算法工程师发 ...
- 常用的SLAM解决方案
ORB SLAM 可以去Github上自己搜索现成的SLAM程序包 在此基础上做优化 视觉SLAM的分类方法:按摄像头的多少分为单目和双目,按是否使用概率方法分为概率法和图法 链接 学习SLAM重要的 ...
- 关于ORB SLAM2资源整理(持续更新)
ORB SLAM2源码讲解(吴博) https://www.youtube.com/watch?v=2GVE7FTW7AU 泡泡机器人视频整理: http://space.bilibili.com/3 ...
- 快看,那个学SLAM 的崩溃了!
点"计算机视觉life"关注,置顶更快接收消息! 本文列举了当前优秀SLAM方案,点出了SLAM学习者的困境,最后打算搞点大事 请把此文转发给你认识的SLAM大神,愿你头发浓密,心 ...
- ORB-SLAM3 细读单目初始化过程(上)
作者:乔不思 来源:微信公众号|3D视觉工坊(系投稿) 3D视觉精品文章汇总:https://github.com/qxiaofan/awesome-3D-Vision-Papers/ 点击上方&qu ...
- 2017~ROS暑期学校~分享
http://www.robotics.sei.ecnu.edu.cn/ROS2017/ ---- 往年暑期学校活动:2015年,2016年 报名开始时间7月2日晚10点:暑期学校报名,机器人挑战赛报 ...
- ORB-SLAM2(一)----使用Eclipse进行开发
1.导入项目 准备工作 1, first we should make sure the compile with build.sh under ORB_SLAM2-master is OK. 2, ...
- 高翔《视觉SLAM十四讲》从理论到实践
目录 第1讲 前言:本书讲什么:如何使用本书: 第2讲 初始SLAM:引子-小萝卜的例子:经典视觉SLAM框架:SLAM问题的数学表述:实践-编程基础: 第3讲 三维空间刚体运动 旋转矩阵:实践-Ei ...
随机推荐
- nginx File not found
出现 nginx File not found 错误 首先判断这个文件是否 真的存在 如果文件确实存在 那么应该是 php-fpm 路径有问题了 解决办法 1查看 php-fpm 的配置文件 我的 文 ...
- StringBuilder用法
//来自MSDN,不太懂英文可以使用百度翻译. //using System; //using System.Text; //public sealed class App //{ // static ...
- Tomcat:配置SSL
SSL简述 SSL就是安全套接字层,是一种允许web浏览器和 web服务器通过安全连接通信的技术.这是一个双向的过程,这意味着 服务器和浏览器在发送数据之前加密所有交流的数据. SSL有一个重要的特点 ...
- Android之android:launchMode
(本文转自:http://www.eoeandroid.com/blog-531377-3446.html) (详细查看:http://blog.csdn.net/liuhe688/article/d ...
- “未来人类”的笔记本,谁买过哦
在jd上看到这款笔记本http://item.jd.com/1166095693.html.拽的很!看看哦,我等IT屌丝别吓着了,看图片欣赏下.
- Error:Flash Download Failed-"Cortex-M3"
Error:Flash Download Failed-"Cortex-M3"出现一般有两种情况: 1.SWD模式下,Debug菜单中,Reset菜单选项(Autodetect/H ...
- [Django]Django1.8修改MySQL已存在表的问题?
前言:django1.8版本出现这种问题,关于标题不好命令,直接看正文问题描述! 问题描述: 在已经生成了models.py中表的情况下,更改了modes.py中的表,但是syncdb不起作用报错.于 ...
- HDU 5183 Negative and Positive (NP) --Hashmap
题意:问有没有数对(i,j)(0<=i<=j<n),使得a[i]-a[i+1]+...+(-1)^(j-i)a[j]为K. 解法:两种方法,枚举起点或者枚举终点. 先保存前缀和:a1 ...
- Tomcat7服务器删除后重新安装失败问题
学习JSP时,需要修改conf下的配置文件,确发现无论如何修改权限都无法保存,所以决定卸载重装到D盘,卸载时又弹出一个对话框,具体内容没看,但是就是卸载不了,所以打算手动删除. 删除后,重装时安装失败 ...
- CH Round #72树洞[二分答案 DFS&&BFS]
树洞 CH Round #72 - NOIP夏季划水赛 描述 在一片栖息地上有N棵树,每棵树下住着一只兔子,有M条路径连接这些树.更特殊地是,只有一棵树有3条或更多的路径与它相连,其它的树只有1条或2 ...