斯坦福大学卷积神经网络教程UFLDL Tutorial - Convolutional Neural Network
Convolutional Neural Network
Overview
A Convolutional Neural Network (CNN) is comprised of one or more convolutional layers (often with a subsampling step) and then followed by one or more fully connected layers as in a standard multilayer neural network. The architecture of a CNN is designed to take advantage of the 2D structure of an input image (or other 2D input such as a speech signal). This is achieved with local connections and tied weights followed by some form of pooling which results in translation invariant features. Another benefit of CNNs is that they are easier to train and have many fewer parameters than fully connected networks with the same number of hidden units. In this article we will discuss the architecture of a CNN and the back propagation algorithm to compute the gradient with respect to the parameters of the model in order to use gradient based optimization. See the respective tutorials on convolution andpooling for more details on those specific operations.
Architecture
A CNN consists of a number of convolutional and subsampling layers optionally followed by fully connected layers. The input to a convolutional layer is a m x m x rm x m x r image where mm is the height and width of the image and rr is the number of channels, e.g. an RGB image has r=3r=3. The convolutional layer will have kk filters (or kernels) of size n x n x qn x n x q where nn is smaller than the dimension of the image and qq can either be the same as the number of channels rr or smaller and may vary for each kernel. The size of the filters gives rise to the locally connected structure which are each convolved with the image to produce kk feature maps of size m−n+1m−n+1. Each map is then subsampled typically with mean or max pooling over p x pp x p contiguous regions where p ranges between 2 for small images (e.g. MNIST) and is usually not more than 5 for larger inputs. Either before or after the subsampling layer an additive bias and sigmoidal nonlinearity is applied to each feature map. The figure below illustrates a full layer in a CNN consisting of convolutional and subsampling sublayers. Units of the same color have tied weights.
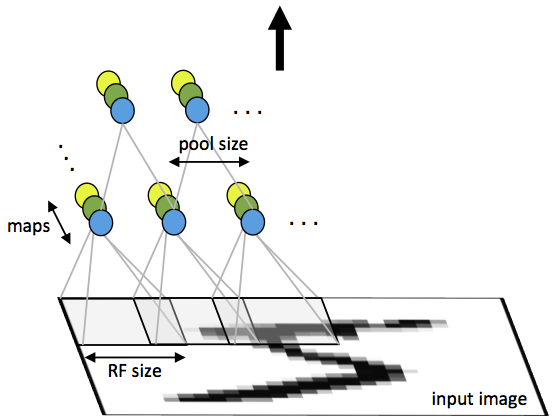
Fig 1: First layer of a convolutional neural network with pooling. Units of the same color have tied weights and units of different color represent different filter maps.
After the convolutional layers there may be any number of fully connected layers. The densely connected layers are identical to the layers in a standard multilayer neural network.
Back Propagation
Let δ(l+1)δ(l+1) be the error term for the (l+1)(l+1)-st layer in the network with a cost function J(W,b;x,y)J(W,b;x,y)where (W,b)(W,b) are the parameters and (x,y)(x,y) are the training data and label pairs. If the ll-th layer is densely connected to the (l+1)(l+1)-st layer, then the error for the ll-th layer is computed as
and the gradients are
If the ll-th layer is a convolutional and subsampling layer then the error is propagated through as
Where kk indexes the filter number and f′(z(l)k)f′(zk(l)) is the derivative of the activation function. The upsampleoperation has to propagate the error through the pooling layer by calculating the error w.r.t to each unit incoming to the pooling layer. For example, if we have mean pooling then upsample simply uniformly distributes the error for a single pooling unit among the units which feed into it in the previous layer. In max pooling the unit which was chosen as the max receives all the error since very small changes in input would perturb the result only through that unit.
Finally, to calculate the gradient w.r.t to the filter maps, we rely on the border handling convolution operation again and flip the error matrix δ(l)kδk(l) the same way we flip the filters in the convolutional layer.
Where a(l)a(l) is the input to the ll-th layer, and a(1)a(1) is the input image. The operation (a(l)i)∗δ(l+1)k(ai(l))∗δk(l+1) is the “valid” convolution between ii-th input in the ll-th layer and the error w.r.t. the kk-th filter.
from: http://ufldl.stanford.edu/tutorial/supervised/ConvolutionalNeuralNetwork/
斯坦福大学卷积神经网络教程UFLDL Tutorial - Convolutional Neural Network的更多相关文章
- 树卷积神经网络Tree-CNN: A Deep Convolutional Neural Network for Lifelong Learning
树卷积神经网络Tree-CNN: A Deep Convolutional Neural Network for Lifelong Learning 2018-04-17 08:32:39 看_这是一 ...
- 深度学习笔记 (一) 卷积神经网络基础 (Foundation of Convolutional Neural Networks)
一.卷积 卷积神经网络(Convolutional Neural Networks)是一种在空间上共享参数的神经网络.使用数层卷积,而不是数层的矩阵相乘.在图像的处理过程中,每一张图片都可以看成一张“ ...
- 卷积神经网络用语句子分类---Convolutional Neural Networks for Sentence Classification 学习笔记
读了一篇文章,用到卷积神经网络的方法来进行文本分类,故写下一点自己的学习笔记: 本文在事先进行单词向量的学习的基础上,利用卷积神经网络(CNN)进行句子分类,然后通过微调学习任务特定的向量,提高性能. ...
- Deep Learning 19_深度学习UFLDL教程:Convolutional Neural Network_Exercise(斯坦福大学深度学习教程)
理论知识:Optimization: Stochastic Gradient Descent和Convolutional Neural Network CNN卷积神经网络推导和实现.Deep lear ...
- Deep Learning 8_深度学习UFLDL教程:Stacked Autocoders and Implement deep networks for digit classification_Exercise(斯坦福大学深度学习教程)
前言 1.理论知识:UFLDL教程.Deep learning:十六(deep networks) 2.实验环境:win7, matlab2015b,16G内存,2T硬盘 3.实验内容:Exercis ...
- Deep Learning 1_深度学习UFLDL教程:Sparse Autoencoder练习(斯坦福大学深度学习教程)
1前言 本人写技术博客的目的,其实是感觉好多东西,很长一段时间不动就会忘记了,为了加深学习记忆以及方便以后可能忘记后能很快回忆起自己曾经学过的东西. 首先,在网上找了一些资料,看见介绍说UFLDL很不 ...
- Deep Learning 10_深度学习UFLDL教程:Convolution and Pooling_exercise(斯坦福大学深度学习教程)
前言 理论知识:UFLDL教程和http://www.cnblogs.com/tornadomeet/archive/2013/04/09/3009830.html 实验环境:win7, matlab ...
- Deep Learning 13_深度学习UFLDL教程:Independent Component Analysis_Exercise(斯坦福大学深度学习教程)
前言 理论知识:UFLDL教程.Deep learning:三十三(ICA模型).Deep learning:三十九(ICA模型练习) 实验环境:win7, matlab2015b,16G内存,2T机 ...
- Deep Learning 12_深度学习UFLDL教程:Sparse Coding_exercise(斯坦福大学深度学习教程)
前言 理论知识:UFLDL教程.Deep learning:二十六(Sparse coding简单理解).Deep learning:二十七(Sparse coding中关于矩阵的范数求导).Deep ...
随机推荐
- springcloud 出现unavailable-replicas
springcloud 出现unavailable-replicas 原因: 1. 部分服务不可用 2. 直接使用了ip地址作为hostname application.properties # 不能 ...
- 【PAT】1013. 数素数 (20)
1013. 数素数 (20) 令Pi表示第i个素数.现任给两个正整数M <= N <= 104,请输出PM到PN的所有素数. 输入格式: 输入在一行中给出M和N,其间以空格分隔. 输出格式 ...
- 面试题15:链表中倒数第K个节点
类似问题:判断是否是环形节点,寻找中间节点,一个指针一次走一步,另一个指针一次走两步 注意检查三点鲁棒性: 1. 链表为空 2. k为0 3. 链表长度不够k ListNode* FindKthToT ...
- Wannafly挑战赛18 C - 异或和
思路:我刚开始是想旋转四次坐标,每次用bit计算每个点左上角的点到这个点的距离,TLE了.... 这种算曼哈顿距离的可以将x 轴和 y 轴独立开来,分别计算. #include<bits/std ...
- JS 数组求 最大值、最小值、平均值以及求和方法
function arrMaxNum2(arr) { return Math.max.apply(null, arr); } function arrMinNum2(arr) { return Mat ...
- Java synchronized的原理解析
开始 类有一个特性叫封装,如果一个类,所有的field都是private的,而且没有任何的method,那么这个类就像是四面围墙+天罗地网,没有门.看起来就是一个封闭的箱子,外面的进不来,里面的出不去 ...
- 【欧拉回路】UVA - 10054 The Necklace
题目大意: 一个环被切割成了n个小块,每个小块有头尾两个关键字,表示颜色. 目标是判断给出的n个小块能否重构成环,能则输出一种可行解(按重构次序输出n个色块的头尾颜色).反之输出“some beads ...
- Unity 2D游戏开发教程之游戏精灵的开火状态
Unity 2D游戏开发教程之游戏精灵的开火状态 精灵的开火状态 “开火”就是发射子弹的意思,在战争类型的电影或者电视剧中,主角们就爱这么说!本节打算为精灵添加发射子弹的能力.因为本游戏在后面会引入敌 ...
- 用ExifInterface读取经纬度的时候遇到的一个问题
如果读取图片经纬度,使用 String latValue = exifInterface.getAttribute(ExifInterface.TAG_GPS_LATITUDE); String ln ...
- Java并发(八):AbstractQueuedSynchronizer
先做总结: 1.AbstractQueuedSynchronizer是什么? AbstractQueuedSynchronizer(AQS)这个抽象类,是Java并发包 java.util.concu ...