痞子衡嵌入式:恩智浦i.MX RT1xxx系列MCU启动那些事(10.A)- FlexSPI NAND启动时间(RT1170)
大家好,我是痞子衡,是正经搞技术的痞子。今天痞子衡给大家介绍的是恩智浦i.MX RT1170 FlexSPI NAND启动时间。
本篇是 i.MXRT1170 启动时间评测第四弹,前三篇分别给大家评测了 Raw NAND 启动时间(基于 MIMXRT1170-EVK_Rev.B)、Serial NOR 启动时间(基于 MIMXRT1170-EVB_Rev.A2)、1bit SPI NOR 恢复启动时间(基于 MIMXRT1170-EVK_Rev.C)。最近痞子衡刚写了篇 《i.MXRT从Serial NAND启动》,趁热打铁,索性在新板卡 MIMXRT1170-EVKB_Rev.B 上再测一下 Serial NAND 的启动时间(这里指在 ITCM 执行,暂不考虑在 SDRAM 执行)。
一、准备工作
1.1 知识储备
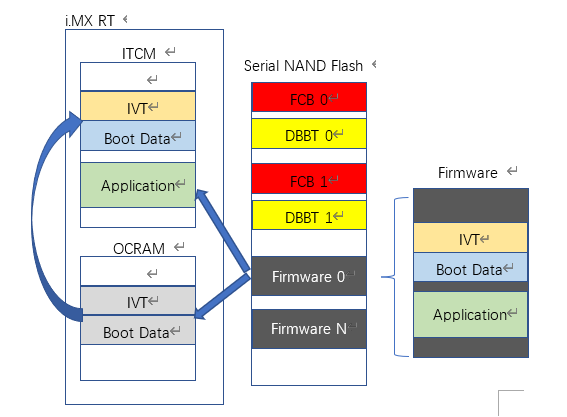
除了依赖的底层外设类型不同之外,Serial NAND 启动流程与 Raw NAND 启动流程几乎是一致的,因为存储介质角度而言两者都是 NAND。我们知道 NAND 中仅能放置 Non-XIP Application,其不支持原地执行,所以需要 BootROM 来完成 Application 拷贝工作(从 NAND 到 ITCM),为了辅助 BootROM 完成工作,我们需要在 NAND 中放一些特殊数据(即下面的 FCB, DBBT, IVT)。
BootROM 首先从 NAND 中读取 FCB(此时是利用 eFuse 0x940 和 0xC80 里的简化时序配置选项),FCB 中含有三类信息:用户设置的完整时序配置数据(可选的)、DBBT 位置,IVT 位置。BootROM 首先会检查是否存在完整时序配置数据,如果有,则使用这个数据重新配置 NAND 访问时序。然后 BootROM 会继续获取 DBBT 数据,获知当前 NAND 的坏块信息,接下来便是根据 IVT 信息获取 Application 数据完成拷贝(拷贝过程中需要避开坏块)。
1.2 时间界定
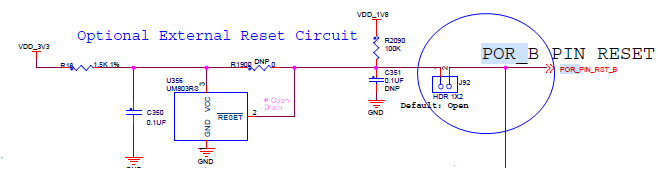
关于时间起点和终点,参考《FlexSPI NOR启动时间》 里的1.2节,方法保持一致。EVKB_Rev.B 上时间起点位置 POR 直接引到了 J92-2,无需额外飞线了,不过这个点位有很多电容,会导致电压上升时间缓慢,影响起点选择,后面会特别备注。
1.3 制作应用程序
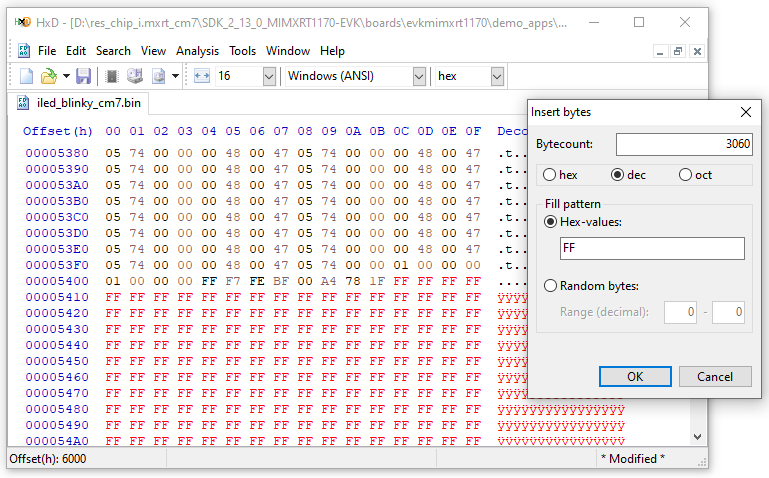
关于应用程序制作,参考《SEMC NAND启动时间》 里的1.3节。这次测试对长度方面做一些优化,代码改动后的测试工程编出来大小是 21516 bytes,我们可以用二进制编辑器打开 .bin 文件在后面直接插入一些数据将其凑整成 24KB,按此方法可以多做几个不同长度的 image。
1.4 下载应用程序
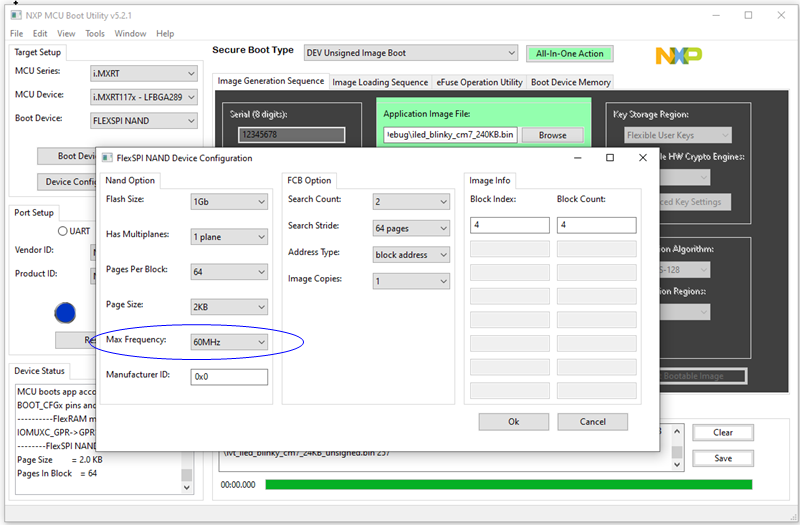
应用程序的下载需借助痞子衡开发的 NXP-MCUBootUtility 工具(v5.2.1版本及以上),我们需要对 EVKB 板卡做一些改动,将原 U23 - NOR Flash 改为 GigaDevice GD5F1GQ5UEYIG。
翻看 GD5F1GQ5UEYIG 的数据手册,它的总容量是 1Gb,Page Size 是 2KB,最高速度可达 133MHz,因此使用 NXP-MCUBootUtility 下载时做如下配置(不同测试,我们仅需调整 Max Frequency 选项即可):
1.5 示波器抓取信号
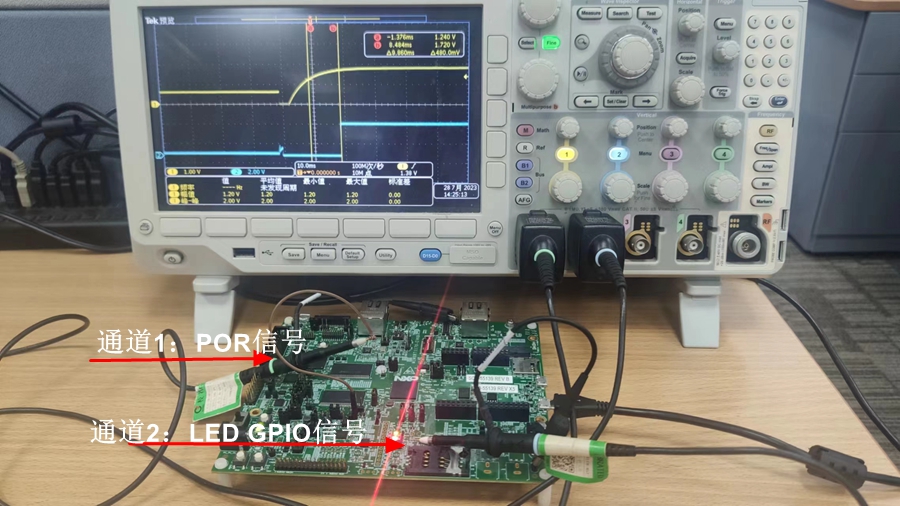
一切准备就绪,可以用示波器抓 NAND 启动时间了。这次痞子衡偷了个懒,就测量两路信号,通道一监测主芯片 POR 信号,通道二监测 LED GPIO 信号。
二、开始测试
2.1 测试结果
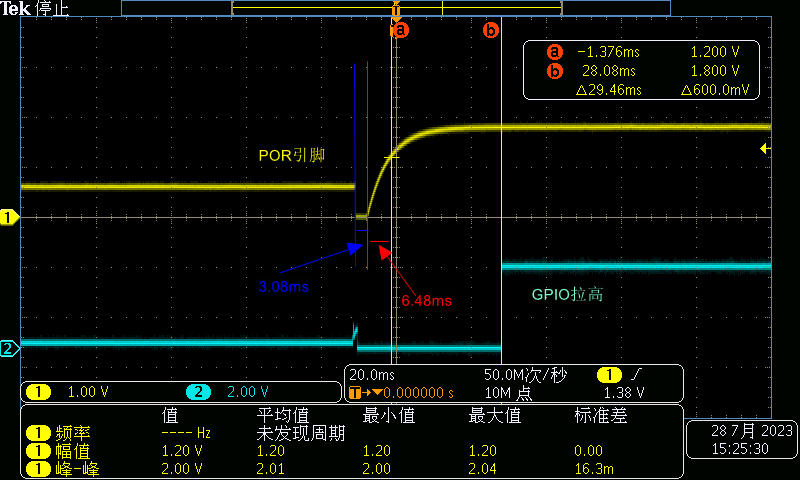
在公布结果之前,痞子衡先带大家分析一下示波器抓取的启动时间波形,方便大家理解后续表格里的各项组成。POR 信号电压上升时间比较缓慢,其供电来自于 VDD_1V8,我们时间起点暂取其标准有效值 70% - 1.2V 处。
现在让我们看结果吧,痞子衡基于 Flash 速度和 App 长度组合做了很多测试,结果如下表所示(注:表中结果都是在 50M 次/秒的采样率下所得):
| Flash型号 | App长度 | Flash Timing模式 | 测量启动时间 | 修正启动时间 |
|---|---|---|---|---|
| GD5F1GQ5UEYIG | 24KB | 30MHz | 11.66 ms | 10.88 ms |
| 50MHz | 10.26 ms | 9.48 ms | ||
| 60MHz | 9.86 ms | 9.08 ms | ||
| 72MHz | 9.46 ms | 8.68 ms | ||
| 80MHz | 9.32 ms | 8.54 ms | ||
| 100MHz | 9.1 ms | 8.32 ms | ||
| 133MHz | 8.86 ms | 8.08 ms | ||
| 240KB | 30MHz | 48.06 ms | 47.28 ms | |
| 50MHz | 34.66 ms | 33.88 ms | ||
| 60MHz | 29.46 ms | 28.68 ms | ||
| 72MHz | 26.66 ms | 25.88 ms | ||
| 80MHz | 24.26 ms | 23.48 ms | ||
| 100MHz | 22.46 ms | 21.68 ms | ||
| 133MHz | 21.76 ms | 20.98 ms |
2.2 结果修正
启动时间包含 BootROM 和 BootFlash 时间,因为这次测试痞子衡没有拉出 NAND CS# 信号,所以无法直接测量出 BootROM 时间,但是可以根据结果推算,选取 24KB 和 240KB 在 30MHz 下测试的两组结果:
BootROM_time + 24KB_60MHz_BootFlash_time = 9.86ms
BootROM_time + 240KB_60MHz_BootFlash_time = 29.46ms
24KB_60MHz_BootFlash_time * 10 = 240KB_60MHz_BootFlash_time(假定)
得出 BootROM_time = 7.68ms
前几篇测试痞子衡得到的 BootROM 时间都是 6.9ms,看来时间起点 POR 按 70% VDD_1V8 的选择偏早,应该要往后再移一些,如果修正结果的话,那上表里的所有结果全部要再减去 (7.68-6.9)ms 才是更精确的启动时间结果。
至此,恩智浦 i.MX RT1170 FlexSPI NAND 启动时间痞子衡便介绍完毕了,掌声在哪里~~~
欢迎订阅
文章会同时发布到我的 博客园主页、CSDN主页、知乎主页、微信公众号 平台上。
微信搜索"痞子衡嵌入式"或者扫描下面二维码,就可以在手机上第一时间看了哦。

痞子衡嵌入式:恩智浦i.MX RT1xxx系列MCU启动那些事(10.A)- FlexSPI NAND启动时间(RT1170)的更多相关文章
- 痞子衡嵌入式:恩智浦i.MX RT1xxx系列MCU启动那些事(13.A)- LPSPI NOR启动时间(RT1170)
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是恩智浦i.MX RT1170 1bit SPI NOR恢复启动时间. 本篇是i.MXRT1170启动时间评测第三弹了,前两篇分别给大家评 ...
- 痞子衡嵌入式:恩智浦i.MX RT1xxx系列MCU启动那些事(11.3)- FlexSPI NOR连接方式大全(RT1010)
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是恩智浦i.MX RT1010的FlexSPI NOR启动的连接方式. 在写完 <FlexSPI NOR启动连接方式(RT1015/ ...
- 痞子衡嵌入式:恩智浦i.MX RT1xxx系列MCU启动那些事(11.0)- FlexSPI NOR启动时间(RT1170)
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是恩智浦i.MX RT1170 FlexSPI NOR启动时间. 痞子衡刚刚拿到i.MXRT1170 B0版本的芯片,迫不及待地在上面跑了 ...
- 痞子衡嵌入式:恩智浦i.MX RT1xxx系列MCU启动那些事(11.B)- FlexSPI NOR连接方式大全(RT1160/1170)
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是恩智浦i.MXRT1160/1170两款MCU的FlexSPI NOR启动的连接方式. 这个 i.MXRT FlexSPI NOR 启动 ...
- 痞子衡嵌入式:飞思卡尔Kinetis系列MCU启动那些事(1)- KBOOT架构
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是飞思卡尔Kinetis系列MCU的KBOOT架构. Bootloader是嵌入式MCU开发里很常见的一种专用的应用程序,在一个没有Boo ...
- 痞子衡嵌入式:飞思卡尔Kinetis系列MCU启动那些事(9)- KBOOT特性(IntegrityCheck)
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是飞思卡尔Kinetis系列MCU的KBOOT之完整性检测(Integrity Check)特性. Application完整性检测是非常 ...
- 痞子衡嵌入式:飞思卡尔Kinetis系列MCU启动那些事(2)- KBOOT形态(ROM/Bootloader/Flashloader)
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是飞思卡尔Kinetis系列MCU的KBOOT形态. 痞子衡在前一篇文章里简介了 KBOOT架构,我们知道KBOOT是一个完善的Bootl ...
- 痞子衡嵌入式:飞思卡尔Kinetis系列MCU启动那些事(3)- KBOOT配置(FOPT/BOOT Pin/BCA)
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是飞思卡尔Kinetis系列MCU的KBOOT配置. KBOOT是支持配置功能的,配置功能可分为两方面:一.芯片系统的启动配置:二.KBO ...
- 痞子衡嵌入式:飞思卡尔Kinetis系列MCU启动那些事(11)- KBOOT特性(ROM API)
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是飞思卡尔Kinetis系列MCU的KBOOT之ROM API特性. KBOOT的ROM API特性主要存在于ROM Bootloader ...
- 痞子衡嵌入式:飞思卡尔Kinetis系列MCU启动那些事(10)- KBOOT特性(可靠升级)
大家好,我是痞子衡,是正经搞技术的痞子.今天痞子衡给大家介绍的是飞思卡尔Kinetis系列MCU的KBOOT之可靠升级(Reliable Update)特性. 所谓可靠升级机制,即在更新Applica ...
随机推荐
- 笔记:C++学习之旅---面向对象程序设计2
笔记:C++学习之旅---面向对象程序设计2 面向对象程序设计基于三个基本概念:数据抽象.继承和动态绑定. 继承和动态绑定对程序的编写有两方面的影响:一是我们可以更容易的定义与其他类相似但不完全相同的 ...
- 深入理解 slab cache 内存分配全链路实现
本文源码部分基于内核 5.4 版本讨论 在经过上篇文章 <从内核源码看 slab 内存池的创建初始化流程> 的介绍之后,我们最终得到下面这幅 slab cache 的完整架构图: 本文笔者 ...
- 2023-01-02:某天,小美在玩一款游戏,游戏开始时,有n台机器, 每台机器都有一个能量水平,分别为a1、a2、…、an, 小美每次操作可以选其中的一台机器,假设选的是第i台, 那小美可以将其变成
2023-01-02:某天,小美在玩一款游戏,游戏开始时,有n台机器, 每台机器都有一个能量水平,分别为a1.a2.-.an, 小美每次操作可以选其中的一台机器,假设选的是第i台, 那小美可以将其变成 ...
- 2022-09-23:整数数组 stations 表示 水平数轴 上各个加油站的位置。给你一个整数 k 。 请你在数轴上增设 k 个加油站, 新增加油站可以位于 水平数轴 上的任意位置,而不必放在整数
2022-09-23:整数数组 stations 表示 水平数轴 上各个加油站的位置.给你一个整数 k . 请你在数轴上增设 k 个加油站, 新增加油站可以位于 水平数轴 上的任意位置,而不必放在整数 ...
- 2022-07-10:以下go语言代码输出什么?A:A,B;B:A,C:A,fatal error;D:fatal error... func main() { var m sync.Mute
2022-07-10:以下go语言代码输出什么?A:A,B:B:A,C:A,fatal error:D:fatal error- func main() { var m sync.Mutex fmt. ...
- 2022-06-15:薯队长最近在参加了一个活动,主办方提供了N个礼物以供挑选, 每个礼物有一个价值,范围在0 ~ 10^9之间, 薯队长可以从中挑选k个礼物。 返回:其中价值最接近的两件礼物之间相差
2022-06-15:薯队长最近在参加了一个活动,主办方提供了N个礼物以供挑选, 每个礼物有一个价值,范围在0 ~ 10^9之间, 薯队长可以从中挑选k个礼物. 返回:其中价值最接近的两件礼物之间相差 ...
- 在 ASP.NET Core Web API 中处理 Patch 请求
一.概述 PUT 和 PATCH 方法用于更新现有资源. 它们之间的区别是,PUT 会替换整个资源,而 PATCH 仅指定更改. 在 ASP.NET Core Web API 中,由于 C# 是一种静 ...
- Python获取当前时间、获取当月第一天、最后一天日期等方法
```python先导入包: import calendarimport datetimefrom datetime import timedelta获取今天日期: #返回datetime格式:eg: ...
- Java网络编程----通过实现简易聊天工具来聊聊BIO
IO模型即输入输出模型,我们今天主要来聊的是java网络编程中的IO模型---BIO模型.BIO即阻塞式IO,Blocking IOblocking [ˈblɒkɪŋ] v. 堵塞; 阻塞; 堵住(某 ...
- vue自定义组件——search-box
pre { overflow-y: auto; max-height: 300px } github地址: https://github.com/lxmghct/my-vue-components 组 ...