PCB genesis SET取中心点--算法实现
最新ICS工厂有一项incam脚本新需求,这里介绍5种解决方法解决
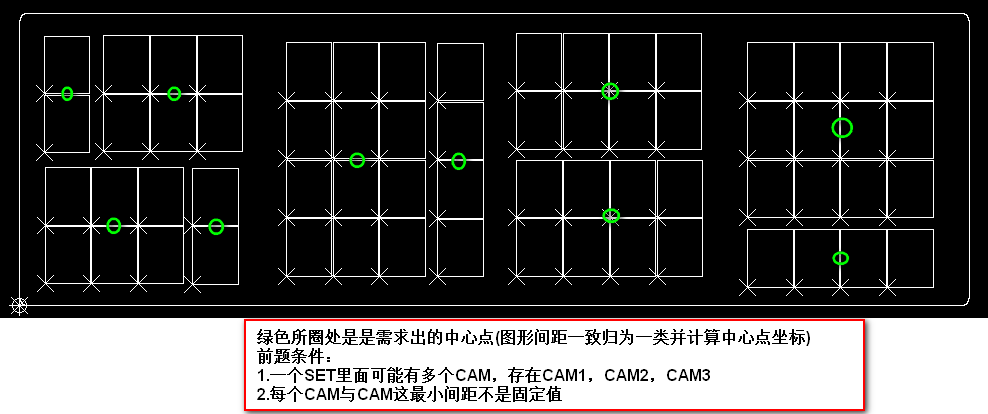
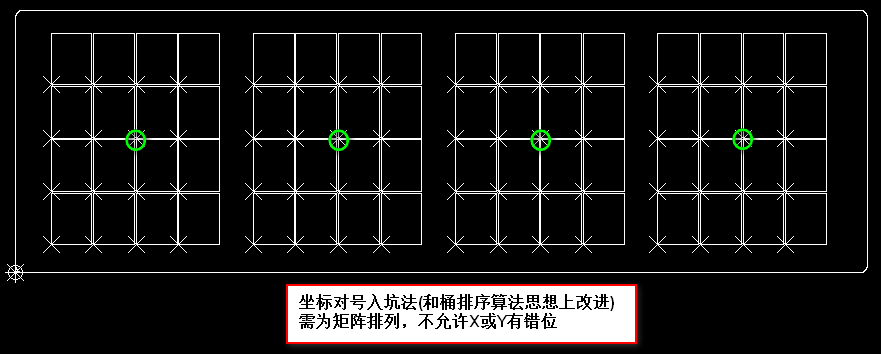
需求如下图所示:绿色所圈处是是需求出的中心点(图形间距一致归为一类并计算中心点坐标)
前题条件:
1.一个SET里面可能有多个CAM,存在CAM1,CAM2,CAM3
2.每个CAM与CAM这最小间距不是固定值
对方法求解前;对此数据存储结构列出来:
/// <summary>
/// Mod_step 坐标data类型 存放PNL中的子板排放坐标位置
/// </summary>
public class Mod_Sr_data
{
public string step_name { get; set; }
public gPoint ps;
public int angle { get; set; }
public bool mirror { get; set; }
public gPoint min;
public gPoint max;
public gPoint size
{
get { return new gPoint(Math.Abs(this.min.x - this.max.x), Math.Abs(this.min.y - this.max.y)); }
}
public gPoint center
{
get { return new gPoint((this.max.x + this.min.x) / , (this.max.y + this.min.y) / ); }
}
}
方法一:矩阵排序分组法求解
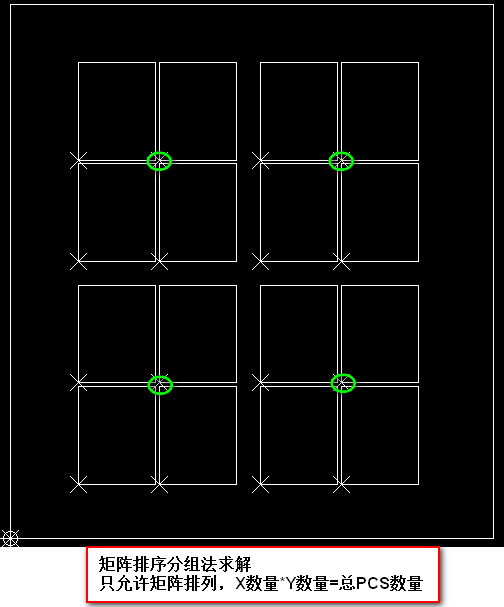
第一步:分别进行X与Y排列,如下图所示
第二步,求出X最近距离,与Y最近距离
第三步, 通过X与Y最近距离求出,间距分组ID号
第四步,通过间距分组ID号,遍历分组
第五步,通过每个分组求出中心点
缺点:只能支持矩阵排列(X数*Y数=PCS总数),X或Y间距全部需保持一致,最小左下角相连PCS最少2个,不支持PCS旋转
代码实现:
private static void SetCenterAddPad1()
{
step gstep = new step(g.JOB);
gProfile profile = g.getProfile(g.STEP, g.JOB);
List<Mod_Sr_data> sr_dataList = gstep.get_step_Sr_data(g.STEP);
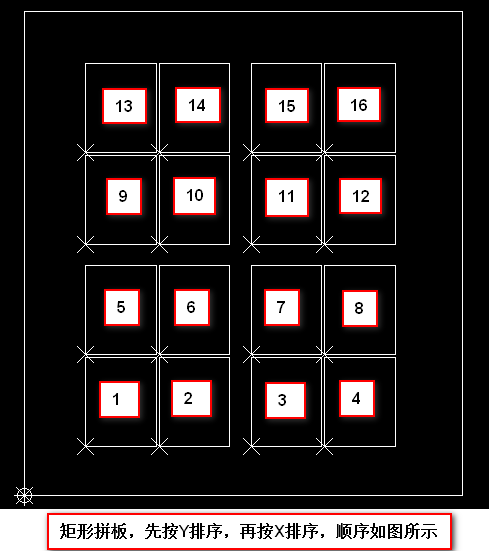
List<Mod_Sr_data> sr_dataList_y_Order = sr_dataList.OrderBy(tt => tt.min.y).ThenBy(tt => tt.min.x).ToList();
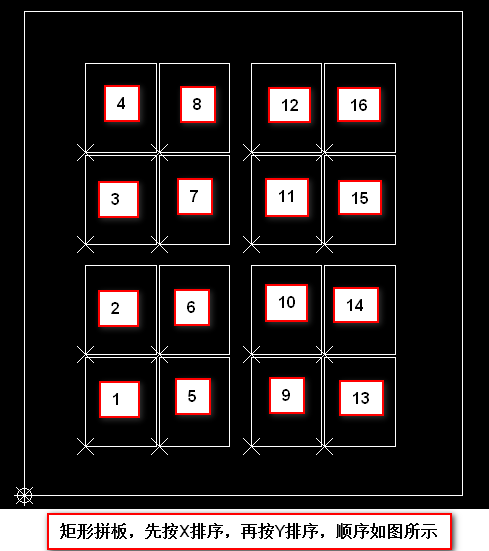
List<Mod_Sr_data> sr_dataList_x_Order = sr_dataList.OrderBy(tt => tt.min.x).ThenBy(tt => tt.min.y).ToList();
List<int> x_CountList = new List<int>();
x_CountList.Add();
List<int> y_CountList = new List<int>();
y_CountList.Add();
double tempDi = ;
double minDi = ;
bool isMinDi = false;
int tempCount = ;
for (int i = ; i < sr_dataList_y_Order.Count - ; i++)
{
if (Math.Abs(sr_dataList_y_Order[i + ].min.y - sr_dataList_y_Order[i].min.y) > 0.1)
break;
tempDi = Math.Abs(sr_dataList_y_Order[i + ].min.x - sr_dataList_y_Order[i].min.x);
if (!isMinDi)
{
minDi = tempDi;
isMinDi = true;
x_CountList[tempCount] = i + ;
}
else
{
if ((Math.Abs(minDi - tempDi) < 0.001))
{
x_CountList[tempCount] = i + ;
}
else
{
tempCount++;
x_CountList.Add(i + );
}
}
}
isMinDi = false;
tempCount = ;
for (int i = ; i < sr_dataList_x_Order.Count - ; i++)
{
if (Math.Abs(sr_dataList_x_Order[i + ].min.x - sr_dataList_x_Order[i].min.x) > 0.1)
break;
tempDi = Math.Abs(sr_dataList_x_Order[i + ].min.y - sr_dataList_x_Order[i].min.y);
if (!isMinDi)
{
minDi = tempDi;
isMinDi = true;
y_CountList[tempCount] = i + ;
}
else
{
if ((Math.Abs(minDi - tempDi) < 0.001))
{
y_CountList[tempCount] = i + ;
}
else
{
tempCount++;
y_CountList.Add(i + );
}
}
} int x_Count = x_CountList.Max(tt => tt) + ;
int y_Count = y_CountList.Max(tt => tt) + ;
List<Mod_Sr_data>[] sr_dataListGroup = new List<Mod_Sr_data>[(x_CountList.Count * y_CountList.Count)];
for (int i = ; i < sr_dataListGroup.Count(); i++)
{
sr_dataListGroup[i] = new List<Mod_Sr_data>();
}
for (int i = ; i < sr_dataList_y_Order.Count; i++)
{
int x_index = i % x_Count;
int y_index = i / x_Count;
for (int j = ; j < x_CountList.Count; j++)
{
if (x_index <= x_CountList[j])
{
x_index = j;
break;
}
}
for (int j = ; j < y_CountList.Count; j++)
{
if (y_index <= y_CountList[j])
{
y_index = j;
break;
}
}
int index = y_index * x_CountList.Count + x_index;
sr_dataListGroup[index].Add(sr_dataList_y_Order[i]);
}
List<gPoint> gpointList = new List<gPoint>();
foreach (var item in sr_dataListGroup)
{
double xVal = item.Sum(tt => tt.center.x) / item.Count;
double yVal = item.Sum(tt => tt.center.y) / item.Count;
gpointList.Add(new gPoint(xVal, yVal));
}
add add_ = new add();
add_.pad(gpointList.ToArray(), );
}
方法二:坐标对号入坑法(类拟桶排序算法思想上改进)
第一步:分别进行X与Y排列
第二步,求出X最近距离,与Y最近距离
第三步, 建二维数组准备挖坑了(X与Y尺寸依据旋转时X与Y互换)
第四步,遍历数据填入到对应的坑位
第五步,通过二维的坑位依次对比最近距离X与Y进行划分数据分组
第五步,通过每个分组求出中心点
缺点:只能支持矩阵排列(中心可以缺少PCS),X或Y间距全部需保持一致,
代码实现,未完待完善
private void SetCenterAddPad2()
{ step gstep = new step(g.JOB);
gProfile profile = g.getProfile(g.STEP, g.JOB);
List<Mod_Sr_data> sr_dataList = gstep.get_step_Sr_data(g.STEP);
List<Mod_Sr_data> sr_dataList_y_Order = sr_dataList.OrderBy(tt => tt.min.y).ThenBy(tt => tt.min.x).ToList();
List<Mod_Sr_data> sr_dataList_x_Order = sr_dataList.OrderBy(tt => tt.min.x).ThenBy(tt => tt.min.y).ToList();
double tempDi = ;
double yDi = ;
double xDi = ;
for (int i = ; i < sr_dataList_y_Order.Count - ; i++)
{
tempDi = Math.Abs(sr_dataList_y_Order[i + ].min.y - sr_dataList_y_Order[i].min.y);
if (tempDi > 0.01 && yDi > tempDi)
yDi = tempDi;
}
for (int i = ; i < sr_dataList_x_Order.Count - ; i++)
{
tempDi = Math.Abs(sr_dataList_x_Order[i + ].min.x - sr_dataList_x_Order[i].min.x);
if (tempDi > 0.01 && xDi > tempDi)
xDi = tempDi;
}
int x_array, y_array;
double xWidth, yHeigth;
double PcsAng = Math.Abs(sr_dataList[].angle - );
if ( < PcsAng && PcsAng < )
{
x_array = (int)Math.Ceiling(profile.Prof.size.y / sr_dataList[].size.y);
y_array = (int)Math.Ceiling(profile.Prof.size.x / sr_dataList[].size.x);
xWidth = sr_dataList[].size.y;
yHeigth = sr_dataList[].size.x;
}
else
{
x_array = (int)Math.Ceiling(profile.Prof.size.x / sr_dataList[].size.x);
y_array = (int)Math.Ceiling(profile.Prof.size.y / sr_dataList[].size.y);
xWidth = sr_dataList[].size.x;
yHeigth = sr_dataList[].size.y;
}
Mod_Sr_data[,] sr_dataArray = new Mod_Sr_data[x_array, y_array];
for (int i = ; i < sr_dataList_y_Order.Count; i++)
{
int x_index = (int)Math.Floor((sr_dataList_y_Order[i].min.x - profile.Prof.min.x) / xWidth);
int y_index = (int)Math.Floor((sr_dataList_y_Order[i].min.y - profile.Prof.min.y) / yHeigth);
sr_dataArray[x_index, y_index] = sr_dataList_y_Order[i];
}
List<int> x_CountList = new List<int>();
x_CountList.Add();
List<int> y_CountList = new List<int>();
y_CountList.Add();
for (int i = ; i < x_array-; i++)
{
for (int j = ; j < y_array-; j++)
{
var aa = sr_dataArray[i, j]; }
}
}
方法三:最近邻聚类算法
方法四:递归最左下角坐标定原点,进行相等距离求解
方法五:扩边求解
PCB genesis SET取中心点--算法实现的更多相关文章
- K中心点算法之PAM
一.PAM聚类算法: 选用簇中位置最中心的对象,试图对n个对象给出k个划分:代表对象也被称为是中心点,其他对象则被称为非代表对象:最初随机选择k个对象作为中心点,该算法反复地用非代表对 ...
- PCB Genesis SET拼板(圆形板拼板) 实现效果(二)
越来发现Genesis采用Surface多边形数据结构的重要性了,当撑握了多边形缩放,交集, 差集,并集等算法, 想实现PCB拼板简直轻而易举了;当然借助多边形算法可以开发出更多的PCB实用的工具出来 ...
- PCB genesis自制孔点 Font字体实现方法
一.先看genesis原有Font字体 在PCB工程CAM加孔点字体要求时,通常我们直接用Geneis软件给我们提供了2种孔点字体canned_57与canned_67,但此字体可能不能满足各个工厂个 ...
- 【转】C语言快速幂取模算法小结
(转自:http://www.jb51.net/article/54947.htm) 本文实例汇总了C语言实现的快速幂取模算法,是比较常见的算法.分享给大家供大家参考之用.具体如下: 首先,所谓的快速 ...
- Raising Modulo Numbers_快速幂取模算法
Description People are different. Some secretly read magazines full of interesting girls' pictures, ...
- 位运算之——按位与(&)操作——(快速取模算法)
学习redis 字典结构,hash找槽位 求槽位的索引值时,用到了 hash值 & sizemask操作, 其后的scan操作涉及扫描顺序逻辑,对同模的槽位 按一定规则扫描! 其中涉及位运算 ...
- 【Java基础】14、位运算之——按位与(&)操作——(快速取模算法)
学习redis 字典结构,hash找槽位 求槽位的索引值时,用到了 hash值 & sizemask操作, 其后的scan操作涉及扫描顺序逻辑,对同模的槽位 按一定规则扫描! 其中涉及位运算 ...
- 09 Memcached 分布式之取模算法的缺陷
一: Memcached 分布式之取模算法的缺陷(1)假设你有8台服务器,运行中突然down一台,则求余数的底数就7. 后果: key_0%8==0 ,key_0%7==0 =>hist(命中) ...
- [原创][开源] SunnyUI.Net 开发日志:UIBarChart 坐标轴刻度取值算法
_ 在开发UIBarChart的过程中,需要绘制Y轴的刻度,数据作图时,纵横坐标轴刻度范围及刻度值的取法,很大程度上取决于数据的分布.对某一组数据,我们很容易就能知道如何选取这些值才能使图画得漂亮.但 ...
随机推荐
- eBPF监控工具bcc系列五工具funccount
eBPF监控工具bcc系列五工具funccount funccount函数可以通过匹配来跟踪函数,tracepoints 或USDT探针.例如所有以vfs_ 开头的内核函数. ./funccount ...
- HTML5 实现Link跳线效果
之前我们推出过Flex版本的Link跳线效果,现在基于HTML5新版本的跳线效果也实现了,细微之处我们进行了改进,如link倾斜的时候Offset方向始终保持垂直等.先看效果.实现的算法和Flex基本 ...
- [luogu4056 JSOI2009] 火星藏宝图 (贪心 dp)
传送门 Solution 一个显然的贪心:选的点数越多越好.这个随便推推就知道了. 那么我们就贪心的从一列上挑最靠下的转移 直接转移不斜率优化复杂度\(O(nm)\),吸一口O2过了... Code ...
- <MySQL>入门七 存储过程和函数
-- 存储过程和函数 /* 存储过程和函数:类似java中的方法 好处: 1.提高代码的重用性 2.简化操作 */ /* 存储过程 含义:一组预先编译好的SQL语句的集合.理解成批处理语句 1.提高代 ...
- Linux设置history命令显示行数以及时间
Linux和unix上都提供了history命令,可以查询以前执行的命令历史记录但是,这个记录并不包含时间项目因此只能看到命令,但是不知道什么时间执行的如何让history记录时间呢? 解决方案 注意 ...
- for 循环新的写法==列表解析
1. (for x in L1) 是一个可迭代对象: 2. 列表解析比for 循环快,列表解析的迭代在解释器内部是以C语言速度执行, 而不是手动python代码执行: (x+10 for x in L ...
- 【模板】大数乘法(51nod 1027)
#include<cstdio> #include<cstring> #include<algorithm> #define LL long long #defin ...
- Unity常用常找(二)
本文章由cartzhang编写,转载请注明出处. 所有权利保留. 文章链接:http://blog.csdn.net/cartzhang/article/details/51315050 作者:car ...
- [K/3Cloud]在插件中根据条件取消表单打开过程
新建一个类,继承自动态表单抽象插件类AbstractBillPlugIn,重写PreOpenForm. /// <summary> /// 销售订单 单据维护界面插件 /// </s ...
- java查询MySQL时,MySQL中tinyint长度为1时转换为boolean
看到别人代码,MySQL数据库中,有下面这个字段,tinyint(1) 这时候java代码中取出来的数据类型就是boolean类型,如果长度 > 1的话,就会变成int类型,特意查了一下,这里参 ...