python opencv3 FLANN单应性匹配
git:https://github.com/linyi0604/Computer-Vision
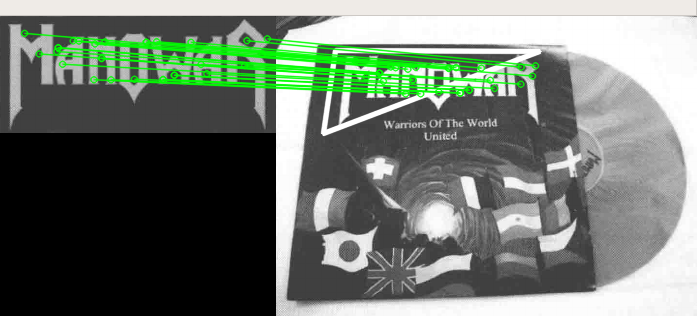
匹配准确率非常高。
单应性指的是图像在投影发生了 畸变后仍然能够有较高的检测和匹配准确率
# coding:utf-8 """
单应性匹配:
两幅图像中的一幅 出现投影畸变的时候,他们还能彼此匹配
""" import cv2
import numpy as np
# 最小匹配数量设为10个, 大于这个数量从中筛选出10个最好的
MIN_MATCH_COUNT = 10 # 读入两幅图片 图片中有相同部分
img1 = cv2.imread("../data/logo1.png", cv2.IMREAD_GRAYSCALE)
img2 = cv2.imread("../data/album1.png", cv2.IMREAD_GRAYSCALE) # 获取sift特征检测器
sift = cv2.xfeatures2d.SIFT_create()
# 检测关键点 计算描述符
kp1, des1 = sift.detectAndCompute(img1, None)
kp2, des2 = sift.detectAndCompute(img2, None) # kdtree建立索引方式的常量参数
FLANN_INDEX_KDTREE = 0
index_params = dict(algorithm=FLANN_INDEX_KDTREE, trees=5)
search_params = dict(checks=50) # checks指定索引树要被遍历的次数
flann = cv2.FlannBasedMatcher(index_params, search_params)
# 进行匹配搜索
matches = flann.knnMatch(des1, des2, k=2) # 寻找距离近的放入good列表
good = []
for m, n in matches:
if m.distance < 0.7 * n.distance:
good.append(m) # 如果足够多 就筛选
if len(good) > MIN_MATCH_COUNT:
# 通过距离近的描述符 找到两幅图片的关键点
src_pts = np.float32([kp1[m.queryIdx].pt for m in good]).reshape(-1, 1, 2)
dst_pts = np.float32([kp2[m.trainIdx].pt for m in good]).reshape(-1, 1, 2) # 单应性匹配图关键点匹配线。。不懂啥意思
M, mask = cv2.findHomography(src_pts, dst_pts, cv2.RANSAC, 5.0)
matchesMask = mask.ravel().tolist() h, w = img1.shape # 计算第二张图相对于第一张图的畸变
pts = np.float32([[0, 0], [0, h-1], [w-1, 0]]).reshape(-1, 1, 2)
dst = cv2.perspectiveTransform(pts, M)
img2 = cv2.polylines(img2, [np.int32(dst)], True, 255, 3, cv2.LINE_AA)
else:
matchesMask = None draw_params = dict(
matchColor=(0, 255, 0),
singlePointColor=None,
matchesMask=matchesMask,
flags=2
) img3 = cv2.drawMatches(img1, kp1, img2, kp2, good, None, **draw_params)
cv2.imshow("", img3)
cv2.waitKey()
python opencv3 FLANN单应性匹配的更多相关文章
- OpenCV仿射变换+投射变换+单应性矩阵
本来想用单应性求解小规模运动的物体的位移,但是后来发现即使是很微小的位移也会带来超级大的误差甚至错误求解,看起来这个方法各种行不通,还是要匹配知道深度了以后才能从三维仿射变换来入手了,纠结~ esti ...
- 机器学习进阶-案例实战-图像全景拼接-图像全景拼接(RANSCA) 1.sift.detectAndComputer(获得sift图像关键点) 2.cv2.findHomography(计算单应性矩阵H) 3.cv2.warpPerspective(获得单应性变化后的图像) 4.cv2.line(对关键点位置进行连线画图)
1. sift.detectAndComputer(gray, None) # 计算出图像的关键点和sift特征向量 参数说明:gray表示输入的图片 2.cv2.findHomography(kp ...
- 【Computer Vision】图像单应性变换/投影/仿射/透视
一.基础概念 1. projective transformation = homography = collineation. 2. 齐次坐标:使用N+1维坐标来表示N维坐标,例如在2D笛卡尔坐标 ...
- 单应性(homography)变换的推导
矩阵的一个重要作用是将空间中的点变换到另一个空间中.这个作用在国内的<线性代数>教学中基本没有介绍.要能形像地理解这一作用,比较直观的方法就是图像变换,图像变换的方法很多,单应性变换是其中 ...
- 相机标定 和 单应性矩阵H
求解相机参数的过程就称之为相机标定. 1.相机模型中的四个平面坐标系: 1.1图像像素坐标系(u,v) 以像素为单位,是以图像的左上方为原点的图像坐标系: 1.2图像物理坐标系(也叫像平面坐标系)(x ...
- OpenCV 之 平面单应性
上篇 OpenCV 之 图象几何变换 介绍了等距.相似和仿射变换,本篇侧重投影变换的平面单应性.OpenCV相关函数.应用实例等. 1 投影变换 1.1 平面单应性 投影变换 (Projectiv ...
- OpenCV-Python 特征匹配 + 单应性查找对象 | 四十五
目标 在本章节中,我们将把calib3d模块中的特征匹配和findHomography混合在一起,以在复杂图像中找到已知对象. 基础 那么我们在上一环节上做了什么?我们使用了queryImage,找到 ...
- opencv 仿射变换 投射变换, 单应性矩阵
仿射 estimateRigidTransform():计算多个二维点对或者图像之间的最优仿射变换矩阵 (2行x3列),H可以是部分自由度,比如各向一致的切变. getAffineTransform( ...
- 相机标定:PNP基于单应面解决多点透视问题
利用二维视野内的图像,求出三维图像在场景中的位姿,这是一个三维透视投影的反向求解问题.常用方法是PNP方法,需要已知三维点集的原始模型. 本文做了大量修改,如有不适,请移步原文: ...
随机推荐
- Redis(Remote Dictionary Server)入门
说说特性 存储结构:键值对支持多种数据类型,包括字符串类型,散列类型,列表类型,集合类型,有序集合类型. 内存存储与持久化:支持将内存中的数据异步写入磁盘中. 丰富的功能:支持为每个键值对设置生存时间 ...
- 【译】第十一篇 Integration Services:日志记录
本篇文章是Integration Services系列的第十一篇,详细内容请参考原文. 简介在前一篇,我们讨论了事件行为.我们分享了操纵事件冒泡默认行为的方法,介绍了父子模式.在这一篇,我们会配置SS ...
- 【navicat112_premium】navicat112_premium数据库连接工具安装过程
此工具及其方便,可以连接mysql.oracle.sqlserver登数据库... 1.下载安装包Navicat Premium_11.2.7简体中文版.rar 下载地址:http://qiaoliq ...
- 转载: 开源整理:Android App新手指引开源控件
http://blog.coderclock.com/2017/05/22/android/open-source-android-app-guide-view-library/ 开源整理:Andro ...
- 详述Java对象创建
Java是一门面向对象的语言,Java程序运行过程中无时无刻都有对象被创建出来.在语言层面上,创建对象(克隆.反序列化)就是一个new关键字而已,但是虚拟机层面上却不是如此.我们看一下在虚拟机层面上创 ...
- java基础79 会话管理(Cookie技术、Session技术)
1.概念 会话管理:管理浏览器和服务器之间会话过程中产生的会话数据. Cookie技术:会话数据保存到浏览器客户端.[存 编号/标记(id)] Session技术:会话技术会保存到 ...
- opencv(5)GUI
OpenCV的图形用户界面(Graphical User Interface, GUI)和绘图等相关功能也是很有用的功能,无论是可视化,图像调试还是我们这节要实现的标注任务,都可以有所帮助. 窗口循环 ...
- HDU 2476 String painter(区间DP+思维)
题目链接:http://acm.hdu.edu.cn/showproblem.php?pid=2476 题目大意:给你字符串A.B,每次操作可以将一段区间刷成任意字符,问最少需要几次操作可以使得字符串 ...
- Java流(Stream)、Scanner类
读取控制台输入 Java 的控制台输入由 System.in 完成. 为了获得一个绑定到控制台的字符流,你可以把 System.in 包装在一个 BufferedReader 对象中来创建一个字符流. ...
- 一步一步学习IdentityServer3 (5)
这篇文章介绍下数据持久化问题,官方例子可能都是缓存数据 Client User Scope 下面介绍下怎么使用数据库持久化 这里需要导入nuget包 :IdentityServer3.EntityF ...