eMMC基础技术8:操作模式1-boot mode
1.前言
eMMC总线操作包含:
- boot mode
- device identification mode
- interrupt mode
- data transfer mode
本文主要描述boot mode。
2. boot operation mode
2.1 boot mode状态机
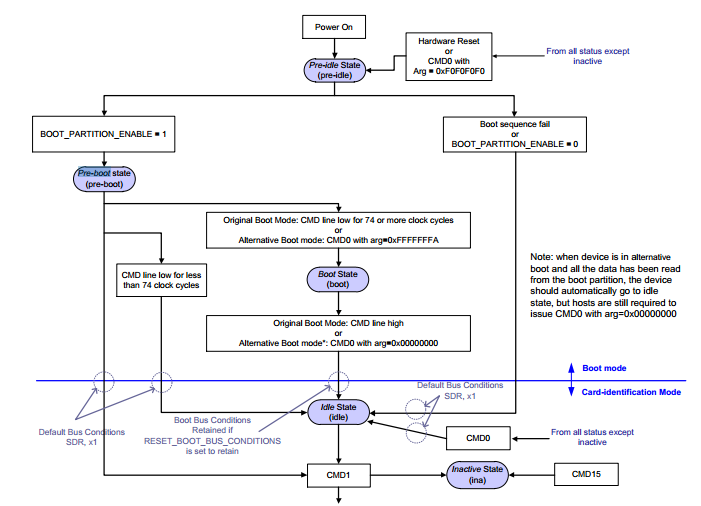
图 eMMC boot mode state
- pre-idle state
. 三种方式可以进入pre-idle状态:(1)power on后;(2)GO_PRE_IDLE_STATE命令(CMD0+0xf0f0f0f0参数);(3)hw reset by host
. GO_PRE_IDLE_STATE或hw reset assert后,device端output bus将呈现高阻态,device的初始地址被设置为0x0001,bus会有默认的驱动能力
. device可以检测到rst_n产生一段脉冲信号,通过上升沿来确定device是否发生了reset操作
. 有两个boot分区,每个分区大小最小为128KB,boot分区与user area是分离的,单独编址
. 可以使用CMD6来设置BOOT_PARTITION_ENABLE=1从boot area启动(否则从user area启动),进入到pre-boot state,如果BOOT_PARTITION_ENABLE=0或不支持boot mode(4.2以前的版本)则直接进入到idle state
- pre-boot state
. 上电或reset后且发送第一个命令CMD1之前,CMD LINE要保持至少74个周期的低电平,device识别到,进入boot state执行初始化,并准备boot data
若是CMD lines没有保持74个时钟周期的LOW,又若是host在初始话过程之前发送任意的正常eMMC命令的话,slave应该没有任何反应且会退出boot mode到Idle State状态即card identification mode
注:CMD0+0xfffffffa执行alternative boot初始化是针对4.4的规范,CMD LINE不是保持74个周期的低电平,而是通过发送CMD0,并带有参数0XFFFFFFFA
- boot state
主要进行boot数据的读取操作:
. host要读取的分区以及data size可以通过extended csd来设置
. 通过保持CMD line低电平或发送CMD0+0XFFFFFFFA来读取boot数据
. 在读取数据期间,cmd line必须保持低电平
. host必须采用push-pull模式,直到boot mode结束
. host可以采用single data rate(SDR)或dual data rate(DDR)
. HS200 & HS400在boot mode不支持
. host可以设置是否从device接收boot acknowledge
. 通过拉高CMD line则会终止boot mode进入idle state,从此离开boot mode 进入到card identification mode
2.2 boot mode时序

图 boot mode时序
进入boot state后:
. 若是boot acknowledge被激活,在CMD信号变LOW之后的50ms之内,slave必须发送acknowledge内容"010"到host。若是boot acknowledge没被激活,slave不会 发送;
.在CMD line变低的1S内,device 必须发出第一个数据给host;
.host必须保持CMD信号为LOW来读取所有的boot数据, host必须使用push-pull模式
.当boot数据读取操作完成,boot操作将会终止;
.通过拉高CMD line则会终止boot mode进入idle state,从此进入card identification mode
.当拉高CMD line后需要经过至少56个clock,才可以发送CMD1
注1:host选择从哪个partition读取boot数据是可以被提前设置的(EXT_CSD byte[179], bits[5:3]). Master可以读取的boot数据大小也是可以计算的(128KB x BYTE_SIZE_MULT (EXT_CSD byte[226]))
注2:host可以通过设置EXT_CSD byte[179],bit 6来选择是否从slave接受acknowledge,若是选择接受host可以通过acknowledge确认slave是在boot模式中运行。
注3:在数据传输阶段若是host把CMD拉高,slave必须在Nst个时钟周期内中终止数据或者acknowledge内容的传输。Nst值为一个数据周期和一个结束bit周期。若是在block传输过程中,master终止了boot模式,则slave必须在Nst个时钟周期内释放data lines。
3.参考文档
[1]http://www.jedec.org/sites/default/files/docs/JESD84-B51.pdf
[2]eMMC启动过程 http://blog.sina.com.cn/s/blog_6cb8cdbd0102vno5.html
eMMC基础技术8:操作模式1-boot mode的更多相关文章
- eMMC基础技术2:eMMC概述
0.前言 本文主要参考eMMC规范,从总体上对eMMC 进行简要介绍.主要包含如下的内容: (1)eMMC系统的总体架构 (2)eMMC的总线协议 (3)device controller (4)fl ...
- eMMC基础技术3:eMMC总线token
1.前言 本文主要介绍eMMC 总线协议相关的内容,主要包括: (1)command token format (2)response token format (3)data packet form ...
- emmc基础技术8:操作模式3-interrupt mode
1. 前言 eMMC总线操作包含: boot mode, device identification mode interrupt mode data transfer mode 本文主要描述inte ...
- emmc基础技术8:操作模式2-device identification mode
1.前言 eMMC总线操作包含: boot mode, device identification mode interrupt mode data transfer mode 本文主要描述devic ...
- emmc基础技术8:操作模式4-data transfer mode
1.前言 eMMC总线操作包含: boot mode, device identification mode interrupt mode data transfer mode 本文主要描述data ...
- eMMC基础技术9:分区管理
[转]http://www.wowotech.net/basic_tech/emmc_partitions.html 0.前言 eMMC 标准中,将内部的 Flash Memory 划分为 4 类区域 ...
- eMMC基础技术11:flash memory
[转]http://www.wowotech.net/basic_tech/367.html 0.前言 eMMC 是 Flash Memory 的一类,在详细介绍 eMMC 之前,先简单介绍一下 Fl ...
- eMMC基础技术1:MMC简介
[转]http://www.wowotech.net/basic_tech/mmc_sd_sdio_intro.html 1. 前言 熟悉Linux kernel的人都知道,kernel使用MMC s ...
- eMMC基础技术4:eMMC command
1.前言 本文主要对eMMC的command进行详细介绍,主要包含如下内容: (1)command类型 (2)command格式 2.command类型 command类型 说明 bc 不带respo ...
随机推荐
- loj #117. 有源汇有上下界最小流
题目链接 有源汇有上下界最小流,->上下界网络流 注意细节,边数组也要算上后加到SS,TT边. #include<cstdio> #include<algorithm> ...
- docker安装Zabbix
1. 先安装数据库mysqldocker run --name zabbix-mysql-server --hostname zabbix-mysql-server \-e MYSQL_ROOT_PA ...
- CF1114D Flood Fill(DP)
题目链接:CF原网 题目大意:$n$ 个方块排成一排,第 $i$ 个颜色为 $c_i$.定义一个颜色联通块 $[l,r]$ 当且仅当 $l$ 和 $r$ 之间(包括 $l,r$)所有方块的颜色相同.现 ...
- Java: |(或运算) 与 多选判断
今天需要在程序中做一个多选判断,突然想起以前经常遇到的 x |= y | z; 这样的,我也明白这个是多选的用意,但为什么能达到我们希望的多选操作,我还真的没去研究过. 今天早上,百度了一下,搜索到了 ...
- 使用React.cloneElement()给子组件传值
React提供了一个克隆组件的API: React.cloneElement( element, [props], [...child] ) 可以利用该方法,给子组件传值,使用如下: class Pa ...
- 简单的使用gulp生成雪碧图
有一个在线工具:https://www.toptal.com/developers/css/sprite-generator.生成雪碧图是极其方便的. 现在呢,我们来试试用gulp来生成雪碧图. 第一 ...
- Codeforces Round #516 (Div. 2, by Moscow Team Olympiad) D. Labyrinth
http://codeforces.com/contest/1064/problem/D 向上/向下加0,向左/右加1, step = 0,1,…… 求的是最少的步数,所以使用bfs. step=k ...
- chage命令
chage命令是用来修改帐号和密码的有效期限. 语法 chage [选项] 用户名 选项 -m:密码可更改的最小天数.为零时代表任何时候都可以更改密码. -M:密码保持有效的最大天数. -w:用户密码 ...
- promise第一篇-简介
1. 创建一个promise对象 var promise = new Promise(function(resolve, reject){ //异步处理 //处理结束后调用resolve或reject ...
- Spring_bean的实例化时机
前言:创建Java对象 public class User { private String name; private Integer age; public User() { System.out ...