eMMC基础技术8:操作模式1-boot mode
1.前言
eMMC总线操作包含:
- boot mode
- device identification mode
- interrupt mode
- data transfer mode
本文主要描述boot mode。
2. boot operation mode
2.1 boot mode状态机
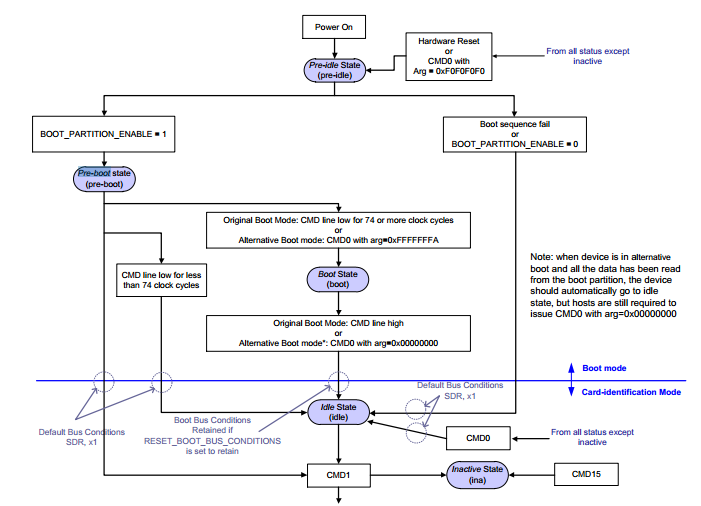
图 eMMC boot mode state
- pre-idle state
. 三种方式可以进入pre-idle状态:(1)power on后;(2)GO_PRE_IDLE_STATE命令(CMD0+0xf0f0f0f0参数);(3)hw reset by host
. GO_PRE_IDLE_STATE或hw reset assert后,device端output bus将呈现高阻态,device的初始地址被设置为0x0001,bus会有默认的驱动能力
. device可以检测到rst_n产生一段脉冲信号,通过上升沿来确定device是否发生了reset操作
. 有两个boot分区,每个分区大小最小为128KB,boot分区与user area是分离的,单独编址
. 可以使用CMD6来设置BOOT_PARTITION_ENABLE=1从boot area启动(否则从user area启动),进入到pre-boot state,如果BOOT_PARTITION_ENABLE=0或不支持boot mode(4.2以前的版本)则直接进入到idle state
- pre-boot state
. 上电或reset后且发送第一个命令CMD1之前,CMD LINE要保持至少74个周期的低电平,device识别到,进入boot state执行初始化,并准备boot data
若是CMD lines没有保持74个时钟周期的LOW,又若是host在初始话过程之前发送任意的正常eMMC命令的话,slave应该没有任何反应且会退出boot mode到Idle State状态即card identification mode
注:CMD0+0xfffffffa执行alternative boot初始化是针对4.4的规范,CMD LINE不是保持74个周期的低电平,而是通过发送CMD0,并带有参数0XFFFFFFFA
- boot state
主要进行boot数据的读取操作:
. host要读取的分区以及data size可以通过extended csd来设置
. 通过保持CMD line低电平或发送CMD0+0XFFFFFFFA来读取boot数据
. 在读取数据期间,cmd line必须保持低电平
. host必须采用push-pull模式,直到boot mode结束
. host可以采用single data rate(SDR)或dual data rate(DDR)
. HS200 & HS400在boot mode不支持
. host可以设置是否从device接收boot acknowledge
. 通过拉高CMD line则会终止boot mode进入idle state,从此离开boot mode 进入到card identification mode
2.2 boot mode时序

图 boot mode时序
进入boot state后:
. 若是boot acknowledge被激活,在CMD信号变LOW之后的50ms之内,slave必须发送acknowledge内容"010"到host。若是boot acknowledge没被激活,slave不会 发送;
.在CMD line变低的1S内,device 必须发出第一个数据给host;
.host必须保持CMD信号为LOW来读取所有的boot数据, host必须使用push-pull模式
.当boot数据读取操作完成,boot操作将会终止;
.通过拉高CMD line则会终止boot mode进入idle state,从此进入card identification mode
.当拉高CMD line后需要经过至少56个clock,才可以发送CMD1
注1:host选择从哪个partition读取boot数据是可以被提前设置的(EXT_CSD byte[179], bits[5:3]). Master可以读取的boot数据大小也是可以计算的(128KB x BYTE_SIZE_MULT (EXT_CSD byte[226]))
注2:host可以通过设置EXT_CSD byte[179],bit 6来选择是否从slave接受acknowledge,若是选择接受host可以通过acknowledge确认slave是在boot模式中运行。
注3:在数据传输阶段若是host把CMD拉高,slave必须在Nst个时钟周期内中终止数据或者acknowledge内容的传输。Nst值为一个数据周期和一个结束bit周期。若是在block传输过程中,master终止了boot模式,则slave必须在Nst个时钟周期内释放data lines。
3.参考文档
[1]http://www.jedec.org/sites/default/files/docs/JESD84-B51.pdf
[2]eMMC启动过程 http://blog.sina.com.cn/s/blog_6cb8cdbd0102vno5.html
eMMC基础技术8:操作模式1-boot mode的更多相关文章
- eMMC基础技术2:eMMC概述
0.前言 本文主要参考eMMC规范,从总体上对eMMC 进行简要介绍.主要包含如下的内容: (1)eMMC系统的总体架构 (2)eMMC的总线协议 (3)device controller (4)fl ...
- eMMC基础技术3:eMMC总线token
1.前言 本文主要介绍eMMC 总线协议相关的内容,主要包括: (1)command token format (2)response token format (3)data packet form ...
- emmc基础技术8:操作模式3-interrupt mode
1. 前言 eMMC总线操作包含: boot mode, device identification mode interrupt mode data transfer mode 本文主要描述inte ...
- emmc基础技术8:操作模式2-device identification mode
1.前言 eMMC总线操作包含: boot mode, device identification mode interrupt mode data transfer mode 本文主要描述devic ...
- emmc基础技术8:操作模式4-data transfer mode
1.前言 eMMC总线操作包含: boot mode, device identification mode interrupt mode data transfer mode 本文主要描述data ...
- eMMC基础技术9:分区管理
[转]http://www.wowotech.net/basic_tech/emmc_partitions.html 0.前言 eMMC 标准中,将内部的 Flash Memory 划分为 4 类区域 ...
- eMMC基础技术11:flash memory
[转]http://www.wowotech.net/basic_tech/367.html 0.前言 eMMC 是 Flash Memory 的一类,在详细介绍 eMMC 之前,先简单介绍一下 Fl ...
- eMMC基础技术1:MMC简介
[转]http://www.wowotech.net/basic_tech/mmc_sd_sdio_intro.html 1. 前言 熟悉Linux kernel的人都知道,kernel使用MMC s ...
- eMMC基础技术4:eMMC command
1.前言 本文主要对eMMC的command进行详细介绍,主要包含如下内容: (1)command类型 (2)command格式 2.command类型 command类型 说明 bc 不带respo ...
随机推荐
- Deep Learning(深度学习)学习笔记整理系列二
声明: 1)该Deep Learning的学习系列是整理自网上很大牛和机器学习专家所无私奉献的资料的.具体引用的资料请看参考文献.具体的版本声明也参考原文献. 2)本文仅供学术交流,非商用.所以每一部 ...
- 自学Linux Shell12.8-循环实例
点击返回 自学Linux命令行与Shell脚本之路 12.8-循环实例 待定. 3 fi bash shell的if语句会运行if后面的那个命令. 如果该命令的退出状态码是0 (该命令成功运行),位于 ...
- [luogu1962]斐波那契数列
来提供两个正确的做法: 斐波那契数列双倍项的做法(附加证明) 矩阵快速幂 一.双倍项做法 在偶然之中,在百度中翻到了有关于斐波那契数列的词条(传送门),那么我们可以发现一个这个规律$ \frac{F_ ...
- 【转】hex和bin文件格式的区别
hex和bin文件格式的区别 Intel HEX文件是记录文本行的ASCII文本文件,在Intel HEX文件中,每一行是一个HEX记录,由十六进制数组成的机器码或者数据常量.Intel HEX文件经 ...
- 变量[^_^][T_T]
变量[^_^][T_T]source .bashrcget_ps1(){if [ "$?" = "0" ]then#we're on the system co ...
- 【ATcoder s8pc_3 F】 寿司
http://s8pc-3.contest.atcoder.jp/tasks/s8pc_3_f (题目链接) 题意 有一个长度为$N$的数列$A$,初始为$0$.$Q$次操作,每次两个参数$x,y$. ...
- 部署kubernetes1.8.3高可用集群
Kubernetes作为容器应用的管理平台,通过对pod的运行状态进行监控,并且根据主机或容器失效的状态将新的pod调度到其他node上,实现了应用层的高可用. 针对kubernetes集群,高可用性 ...
- 拆分string 用空格 逗号
string that have both comma and space struct tokens: std::ctype<char>{ tokens(): std::ctype< ...
- Linux下的定时器类实现(select定时+线程)
更好的计时器类实现:LINUX RTC机制实现计时器类(原创) 很多时候需要在LINUX下用到定时器,但像setitimer()和alarm()这样的定时器有时会和sleep()函数发生冲突,这样就给 ...
- JAVA8给我带了什么——Optional和CompletableFuture
不管是JAVA,还是.NET.我们常常会看到空异常(NullPointerException).这种异常都是在运行的过程中出现.往往是变量是一个null值.但是你引用这个变量的后继字段或是方法.所以我 ...