大角度非迭代的空间坐标旋转C#实现
1. 绪论
在前面文章中提到空间直角坐标系相互转换,测绘坐标转换时,一般涉及到的情况是:两个直角坐标系的小角度转换。这个就是我们经常在测绘数据处理中,WGS-84坐标系、54北京坐标系、80西安坐标系、国家2000坐标系之间的转换。
所谓小角度转换,指直角坐标系\(XOY\)和直角坐标系\(X'O'Y'\)之间,对应轴的旋转角度很小,满足泰勒级数展开后的线性模型。
常见的三维坐标转换模型有[1]:
- 布尔沙模型
- 莫洛琴斯基模型
- 范式模型
但,当两个坐标系对应轴的旋转角度大道一定程度时,则无法使用低阶的泰勒级数展开,且迭代的计算量、精度、速度无法取得平衡[2]。存在以下缺点:
- 仅适用于满足近似处理的小角度转换
- 设计复杂的三角函数运算
- 需要迭代计算
罗德里格矩阵是摄影测量中的常见方法,在该方法中,不需要进行三角函数的计算和迭代运算。计算过程简单明了,易于编程实现。不仅适用于小角度的坐标转换,也适用于大角度的空间坐标转换。
本文将介绍罗德里格矩阵的基本原理和C#实现,并用实例证明解算的有效性。
2. 罗德里格矩阵坐标转换原理
2.1 坐标转换基本矩阵
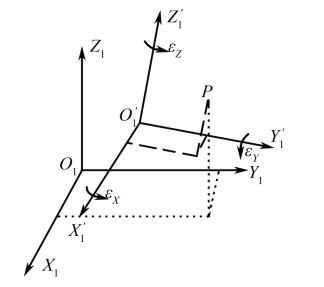
两个空间直角坐标系分别为\(XOY\)和\(X'O'Y'\),坐标系原点不一致,存在三个平移参数\(\Delta X\)、\(\Delta Y\)、\(\Delta Z\)。它们间的坐标轴也相互不平行,存在三个旋转参数\(\epsilon x\)、\(\epsilon y\)、\(\epsilon z\)。同一点A在两个坐标系中的坐标分别为\((X,Y,Z)\)和\((X',Y',Z')\)。
显然,这两个坐标系通过坐标轴的平移和旋转变换可取得,坐标间的转换关系如下:
X \\
Y \\
Z
\end{array}\right]=\lambda R\left[\begin{array}{l}
X^{\prime} \\
Y^{\prime} \\
Z^{\prime}
\end{array}\right]+\left[\begin{array}{l}
\Delta X \\
\Delta Y \\
\Delta Z
\end{array}\right] \tag{1}
\]
其中,\(\lambda\)是比例因子,\(R\left(\varepsilon_Y\right) R\left(\varepsilon_X\right) R\left(\varepsilon_Z\right)\)分别是绕Y轴,X轴,Z轴的旋转矩阵。注意,旋转的顺序不同,\(R\) 的表达形式不同。
R & =R\left(\varepsilon_Y\right) R\left(\varepsilon_X\right) R\left(\varepsilon_Z\right) \\
& =\left[\begin{array}{ccc}
\cos \varepsilon_Y \cos \varepsilon_Z-\sin \varepsilon_Y \sin \varepsilon_X \sin \varepsilon_Z & -\cos \varepsilon_Y \sin \varepsilon_Z-\sin \varepsilon_Y \sin \varepsilon_X \cos \varepsilon_Z & -\sin \varepsilon_Y \cos \varepsilon_X \\
\cos \varepsilon_X \sin \varepsilon_Z & \cos \varepsilon_X \cos \varepsilon_Z & -\sin \varepsilon_X \\
\sin \varepsilon_Y \cos \varepsilon_Z+\cos \varepsilon_Y \sin \varepsilon_X \sin \varepsilon_Z & -\sin \varepsilon_Y \sin \varepsilon_Z+\cos \varepsilon_Y \sin \varepsilon_X \cos \varepsilon_Z & \cos \varepsilon_Y \cos \varepsilon_X
\end{array}\right]
\end{aligned}
\]
习惯上称\(R\)为旋转矩阵,\([\Delta X,\Delta Y,\Delta Z]^T\)为平移矩阵。只要求出\(\Delta X\)、\(\Delta Y\) 、\(\Delta Z\),\(\varepsilon_X\)、\(\varepsilon_Y\)、\(\varepsilon_Z\),这7个转换参数,或者直接求出旋转矩阵和平移矩阵,就可以实现两个坐标系间的转换。
2.2 计算技巧-重心矩阵
为计算方便,对所用到的坐标进行重心化处理。将两个坐标系的公共点的坐标均化算为以重心为原点的重心化坐标。分别记为\((\bar{X}, \bar{Y}, \bar{Z})\)和\(\left(\bar{X}^{\prime}, \bar{Y}^{\prime}, \bar{Z}^{\prime}\right)\)两个坐标系的重心的坐标分别为\((X_g, Y_g, Z_g)\)和\((X'_g, Y'_g, Z'_g)\)。
X_k=\frac{\sum_{i=1}^n X_i}{n}, Y_k=\frac{\sum_{i=1}^n Y_i}{n}, Z_k=\frac{\sum_{i=1}^n Z_i}{n} \\
X_k^{\prime}=\frac{\sum_{i=1}^n X_i^{\prime}}{n}, Y_k^{\prime}=\frac{\sum_{i=1}^n Y_i^{\prime}}{n}, Z_k^{\prime}=\frac{\sum_{i=1}^n Z_i^{\prime}}{n} \\
\bar{X}_i=X_i-X_k, \bar{Y}_i=Y_i-Y_k, \bar{Z}_i=Z_i-Z_k \\
\bar{X}_i^{\prime}=X_i^{\prime}-X_k^{\prime}, \bar{Y}_i^{\prime}=Y_i^{\prime}-Y_k^{\prime}, \bar{Z}_i^{\prime}=Z_i^{\prime}-Z_k^{\prime}
\end{array}\right.
\]
因此,可以将式(1)变为:
\bar{X} \\
\bar{Y} \\
\bar{Z}
\end{array}\right]=\lambda R\left[\begin{array}{l}
\bar{X}^{\prime} \\
\bar{Y}^{\prime} \\
\bar{Z}^{\prime}
\end{array}\right] \tag{2}
\]
\Delta X \\
\Delta Y \\
\Delta Z
\end{array}\right]=\left[\begin{array}{l}
X_g \\
Y_g \\
Z_g
\end{array}\right]-\lambda R\left[\begin{array}{l}
X_g^{\prime} \\
Y_g^{\prime} \\
Z_g^{\prime}
\end{array}\right] \tag{3}
\]
因而,转换参数可分两步来求解。先用式(2)求出旋转参数和比例因子,再用式(,3)求出平移参数。
2.3 基于罗德里格斯矩阵的转换方法
对式(2)两边取2-范数,由于\(\lambda > 0\),旋转矩阵为正交阵的特性,可得:
\]
对于n个公共点,可得\(\lambda\)的最小均方估计:
\]
得到比例因子的最小均方估计后,可将旋转矩阵 \(R\) 表示为:
\]
其中,\(I\)为单位矩阵,\(S\)为反对称矩阵。将式(5)带入式(3),可得:
\bar{X}-\lambda \bar{X}^{\prime} \\
\bar{Y}-\lambda \bar{Y}^{\prime} \\
\bar{Z}-\lambda \bar{Z}^{\prime}
\end{array}\right]=\left[\begin{array}{ccc}
0 & -\left(\bar{Z}+\lambda \bar{Z}^{\prime}\right) & -\left(\bar{Y}+\lambda \bar{Y}^{\prime}\right) \\
-\left(\bar{Z}+\lambda \bar{Z}^{\prime}\right) & 0 & \bar{X}+\lambda \bar{X}^{\prime} \\
\bar{Y}+\lambda \bar{Y}^{\prime} & \bar{X}+\lambda \bar{X}^{\prime} & 0
\end{array}\right]\left[\begin{array}{l}
a \\
b \\
c
\end{array}\right] \tag{6}
\]
3. C#代码实现
矩阵运算使用MathNet.Numerics库,初始化字段MatrixBuilder<double> mb = Matrix<double>.Build和VectorBuilder<double> vb = Vector<double>.Build
3.1 计算矩阵重心坐标
Vector<double> BarycentricCoord(Matrix<double> coordinate)
{
Vector<double> barycentric = vb.Dense(3, 1);
int lenCoord = coordinate.ColumnCount;
if (lenCoord > 2)
barycentric = coordinate.RowSums();
barycentric /= lenCoord;
return barycentric;
}
3.2 计算比例因子
取2-范数使用点乘函数PointwisePower(2.0):
double ScaleFactor(Matrix<double> sourceCoord, Matrix<double> targetCoord)
{
double k = 0;
double s1 = 0;
double s2 = 0;
Vector<double> sourceColL2Norm = sourceCoord.PointwisePower(2.0).ColumnSums();
Vector<double> targetColL2Norm = targetCoord.PointwisePower(2.0).ColumnSums();
int lenSourceCoord = sourceCoord.ColumnCount;
int lenTargetCoord = targetCoord.ColumnCount;
//只有在目标矩阵和源矩阵大小一致时,才能计算
if (lenSourceCoord == lenTargetCoord)
{
s1 = sourceColL2Norm.PointwiseSqrt().PointwiseMultiply(targetColL2Norm.PointwiseSqrt()).Sum();
s2 = sourceColL2Norm.Sum();
}
k = s1 / s2;
return k;
}
3.3 计算罗德里格参数
这里的罗德里格参数就是式(6)中的\([a, b, c]^T\)。
Vector<double> RoderickParas(double scalceFactor, Matrix<double> sourceCoord, Matrix<double> targetCoord)
{
Vector<double> roderick = vb.Dense(new double[] { 0, 0, 0 });
int lenData = sourceCoord.ColumnCount;
//常系数矩阵
var lConstant = vb.Dense(new double[3 * lenData]);
//系数矩阵
var coefficient = mb.DenseOfArray(new double[3 * lenData, 3]);
//构造相应矩阵
for (int i = 0; i < lenData; i++)
{
lConstant[3 * i] = targetCoord[0, i] - scalceFactor * sourceCoord[0, i];
lConstant[3 * i + 1] = targetCoord[1, i] - scalceFactor * sourceCoord[1, i];
lConstant[3 * i + 2] = targetCoord[2, i] - scalceFactor * sourceCoord[2, i];
coefficient[3 * i, 0] = 0;
coefficient[3 * i, 1] = -(targetCoord[2, i] + scalceFactor * sourceCoord[2, i]);
coefficient[3 * i, 2] = -(targetCoord[1, i] + scalceFactor * sourceCoord[1, i]);
coefficient[3 * i + 1, 0] = -(targetCoord[2, i] + scalceFactor * sourceCoord[2, i]);
coefficient[3 * i + 1, 1] = 0;
coefficient[3 * i + 1, 2] = targetCoord[0, i] + scalceFactor * sourceCoord[0, i];
coefficient[3 * i + 2, 0] = targetCoord[1, i] + scalceFactor * sourceCoord[1, i];
coefficient[3 * i + 2, 1] = targetCoord[0, i] + scalceFactor * sourceCoord[0, i];
coefficient[3 * i + 2, 2] = 0;
}
roderick = coefficient.TransposeThisAndMultiply(coefficient).Inverse() * coefficient.Transpose() * lConstant;
return roderick;
}
3.4 解析罗德里格矩阵
此处,就是式(5)的实现。
/// <summary>
/// 解析罗德里格矩阵为旋转矩阵和平移矩阵
/// </summary>
/// <param name="scaleFactor">比例因子</param>
/// <param name="roderick">罗德里格矩阵</param>
/// <param name="coreSourceCoord">原坐标系坐标</param>
/// <param name="coreTargetCoord">目标坐标系坐标</param>
/// <returns></returns>
(Matrix<double>, Vector<double>) RotationMatrix(double scaleFactor, Vector<double> roderick, Vector<double> coreSourceCoord, Vector<double> coreTargetCoord)
{
Matrix<double> rotation = mb.DenseOfArray(new double[,]
{
{0,0,0 },
{0,0,0 },
{0,0,0 }
});
//反对称矩阵
Matrix<double> antisymmetric = mb.DenseOfArray(new double[,]
{
{ 0, -roderick[2], -roderick[1] },
{roderick[2], 0, -roderick[0] },
{roderick[1], roderick[0], 0 }
});
// 创建单位矩阵
// 然后与式(5)的 S 执行 + 和 - 操作
rotation = (DenseMatrix.CreateIdentity(3) - antisymmetric).Inverse() * (DenseMatrix.CreateIdentity(3) + antisymmetric);
translation = coreTargetCoord - scaleFactor * rotation * coreSourceCoord;
return (rotation, translation);
}
3.5 调用逻辑
// 1. 字段值准备
MatrixBuilder<double> mb = Matrix<double>.Build;
VectorBuilder<double> vb = Vector<double>.Build;
// 2. 写入源坐标系的坐标。注意这里的x,y,z输入顺序
Matrix<double> source = mb.DenseOfArray(new double[,]
{
{-17.968, -12.829, 11.058 },
{-0.019 , 7.117, 11.001 },
{0.019 , -7.117, 10.981 }
}).Transpose();
// 3. 写入目标坐标系的坐标
Matrix<double> target = mb.DenseOfArray(new double[,]
{
{ 3392088.646,504140.985,17.958 },
{ 3392089.517,504167.820,17.775 },
{ 3392098.729,504156.945,17.751 }
}).Transpose();
// 4. 重心化
var coreSource = BarycentricCoord(source);
var coreTarget = BarycentricCoord(target);
var sourceCoords = source - mb.DenseOfColumnVectors(coreSource, coreSource, coreSource);
var targetCoords = target - mb.DenseOfColumnVectors(coreTarget, coreTarget, coreTarget);
// 5. 求比例因子
double k = ScaleFactor(sourceCoords, targetCoords);
// 6. 解算咯德里格参数
var roderick = RoderickParas(k, sourceCoords, targetCoords);
// 7. 旋转
(Matrix<double> ro, Vector<double> tran) = RotationMatrix(k, roderick, coreSource, coreTarget);
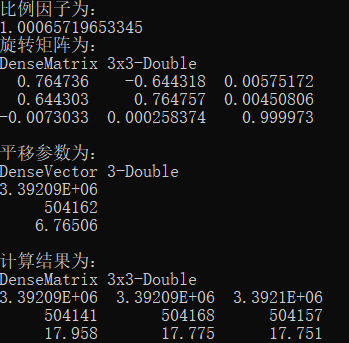
Console.WriteLine("比例因子为:");
Console.WriteLine(k);
Console.WriteLine("旋转矩阵为:");
Console.WriteLine(ro.ToString());
Console.WriteLine("平移参数为:");
Console.WriteLine(tran.ToString());
Console.WriteLine("计算结果为:");
Console.WriteLine(source2.ToString());
4. 总结
基于罗德里格矩阵的转换方法,在求解两个坐标系间的转换参数,特别是旋转角较大时,实现简单、快速。
大角度非迭代的空间坐标旋转C#实现的更多相关文章
- 画一个PBN大角度飞越转弯保护区
今天出太阳了,尽管街上的行人依旧很少,但心情开始不那么沉闷了.朋友圈里除了关注疫情的最新变化之外,很多人已经开始选择读书或是和家人一起渡过这个最漫长的春节假期.陕西广电网络春节期间所有点播节目一律 ...
- Android 使用PLDroidPlayer播放网络视频 依据视频角度自己主动旋转
近期由于项目需求 .须要播放网络视频 .于是乎 研究了一番 ,说说我遇到的那些坑 如今市面上有几个比較主流好用的第三方框架 Vitamio ( 体积比較大,有商业化风险 github:https:// ...
- 在图片不被裁剪时opencv绕图片中任意点旋转任意角度
opencv绕图片中任意角度旋转任意角度 最近在做项目需要把把图片绕图片中任意点旋转任意角度,考虑到自己旋转需要编写插值算法,所以想到了用opencv,但是网上都是围绕图片中点旋转任意角度的,都是 ...
- 为什么说LAXCUS颠覆了我的大数据使用体验
切入正题前,先做个自我介绍. 本人是从业三年的大数据小码农一枚,在帝都一家有点名气的广告公司工作,同时兼着大数据管理员的职责. 平时主要的工作是配合业务部门,做各种广告大数据计算分析工作,然后制成各种 ...
- Unity手游之路<四>3d旋转-四元数,欧拉角和变幻矩阵
http://blog.csdn.net/janeky/article/details/17272625 今天我们来谈谈关于Unity中的旋转.主要有三种方式.变换矩阵,四元数和欧拉角. 定义 变换矩 ...
- Python 迭代器之列表解析
 [TOC] 尽管while和for循环能够执行大多数重复性任务, 但是由于序列的迭代需求如此常见和广泛, 以至于Python提供了额外的工具以使其更简单和高效. 迭代器在Python中是以C语言的 ...
- SPARK快学大数据分析概要
Spark 是一个用来实现快速而通用的集群计算的平台.在速度方面,Spark 扩展了广泛使用的MapReduce 计算模型,而且高效地支持更多计算模式,包括交互式查询和流处理.在处理大规模数据集时,速 ...
- [opencv] 图像几何变换:旋转,缩放,斜切
几何变换 几何变换可以看成图像中物体(或像素)空间位置改变,或者说是像素的移动. 几何运算需要空间变换和灰度级差值两个步骤的算法,像素通过变换映射到新的坐标位置,新的位置可能是在几个像素之间,即不一定 ...
- 杂项:大数据 (巨量数据集合(IT行业术语))
ylbtech-杂项:大数据 (巨量数据集合(IT行业术语)) 大数据(big data),指无法在一定时间范围内用常规软件工具进行捕捉.管理和处理的数据集合,是需要新处理模式才能具有更强的决策力.洞 ...
- OpenCV文本图像的旋转矫正
用户在使用Android手机拍摄过程中难免会出现文本图像存在旋转角度.这里采用霍夫变换.边缘检测等数字图像处理算法检测图像的旋转角度,并根据计算结果对输入图像进行旋转矫正. 首先定义一个结构元素,再通 ...
随机推荐
- ElastAlert监控日志告警Web攻击行为---tomcat和nginx日志json格式
一.ELK安装 1.2 elk配置 logstash自定义配置文件,取名为filebeat_log.conf : input { beats { port => 5044 client_inac ...
- 5_SpringMVC
一. 什么是MVC框架 MVC全名是Model View Controller, 是模型(model), 视图(view), 控制器(controller)的缩写, 一种软件设计典范, 用一种业务逻辑 ...
- WMS 相比于 ERP 系统有哪些优势?
WMS与ERP系统是两个不同的系统,不存储优势的比较!WMS是仓库管理系统(Warehouse Management System) 的缩写,ERP是Enterprise Resource Plann ...
- JavaScript根据参数获取url中参数名的值
//假设ulr如下var localhost="http://127.0.0.1?name=tom&sex=男&id=1";//正则方法封装function Get ...
- 谣言检测(ClaHi-GAT)《Rumor Detection on Twitter with Claim-Guided Hierarchical Graph Attention Networks》
论文信息 论文标题:Rumor Detection on Twitter with Claim-Guided Hierarchical Graph Attention Networks论文作者:Erx ...
- IDEA生成带参数和返回值注释
步骤说明 打开IDEA进入点击左上角 - 文件 - 设置 - 编辑器 - 活动模板 新建活动模板 填写模板文本 编辑变量 添加变量表达式 设置模板使用范围-设置全部范围应用-或者设置只在Java代码中 ...
- 安装与配置FTP服务器
概: 文件传输协议 (File Transfer Protocol,FTP),用于在网络上进行文件传输的协议.如果用户需要将文件从本机发送到另一台计算机,可以使用FTP上传操作:反之,用户可以使用 ...
- 【ps下载与安装】Adobe Photoshop 2022 for Mac v23.5 中文永久版下载 Ps图像编辑软件
Adobe Photoshop 2022 mac破解版,是一款Ps图像编辑软件,同时支持M1/M2芯片和Intel芯片安装,此主要的更新包括多个新增和改进的功能,例如改进的对象选择工具,其悬停功能可预 ...
- app自动化测试环境安装
一.环境依赖 app自动化测试环境如下: appium服务 第三方库appium-python-client 手机或模拟器 java环境jdk1.8 android环境 二.appium服务安装 1. ...
- shell脚本之一键部署openV~P~N
提前准备:/root目录下: checkpsw.sh ## 官方提供的自定义脚本,可在http://openvpn.se/files/other/checkpsw.sh下载 openvpn@.serv ...