谷歌Cartographer学习(1)-快速安装测试
谷歌自己提供了安装方法,但是安装比较繁琐,我做了一定的修改,代码放到个人github上,https://github.com/hitcm/。
ros下面的安装非常快捷,只需要catkin_make即可。
更多细节,可以看看知乎的问题https://www.zhihu.com/question/51348391/answer/125560951?from=profile_answer_card
个人理解错误的地方还请不吝赐教,转载请标明出处,内容如有改动更新,请看原博:http://www.cnblogs.com/hitcm/,如有任何问题,feel free to contact me at robotsming@gmail.com
如有问题,请及时反馈给我,博客会持续更新。
如下,需要安装3个软件包,ceres solver、cartographer和cartographer_ros
0.安装所有依赖项
sudo apt-get install -y google-mock libboost-all-dev libeigen3-dev libgflags-dev libgoogle-glog-dev liblua5.2-dev libprotobuf-dev libsuitesparse-dev libwebp-dev ninja-build protobuf-compiler python-sphinx ros-indigo-tf2-eigen libatlas-base-dev libsuitesparse-dev liblapack-dev
1.首先安装ceres solver,选择的版本是1.11,路径随意
1. git clone https://github.com/hitcm/ceres-solver-1.11.0.git
2. cd ceres-solver-1.11.0/build
3. cmake ..
4. make –j
5. sudo make install
2.然后安装 cartographer,路径随意
1. git clone https://github.com/hitcm/cartographer.git
2 . cd cartographer/build
3. cmake .. -G Ninja
4. ninja
5. ninja test
6. sudo ninja install
上述第3步执行错误的同学可以忽略3-6步,改用下面的方法。
7. cmake ..
8 . make
9. sudo make install
3.安装cartographer_ros。
谷歌官方提供的安装方法比较繁琐,我对原来的文件进行了少许的修改,核心代码不变,只是修改了编译文件
下载到catkin_ws下面的src文件夹下面
git clone https://github.com/hitcm/cartographer_ros.git
然后到catkin_ws下面运行catkin_make即可。
4.数据下载测试
2d数据,大概500M,用迅雷下载
https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartographer_paper_deutsches_museum.bag
3d数据,8G左右,同样用迅雷下载
https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/cartographer_3d_deutsches_museum.bag
有同学反映上面链接失效了,请用下面的即可。
https://storage.googleapis.com/cartographer-public-data/bags/backpack_3d/b3-2016-04-05-14-14-00.bag
然后运行launch文件即可。
roslaunch cartographer_ros demo_backpack_2d.launch bag_filename:=${HOME}/Downloads/cartographer_paper_deutsches_museum.bag
roslaunch cartographer_ros demo_backpack_3d.launch bag_filename:=${HOME}/Downloads/cartographer_3d_deutsches_museum.bag
刚开始使用ROS的同学运行下面两句是无法工作的,可能出现的错误如下。
[demo_backpack_2d.launch] is neither a launch file in package [cartographer_ros] nor is [cartographer_ros] a launch file name
The traceback for the exception was written to the log file
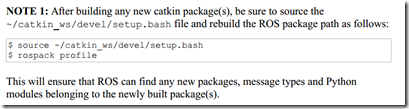
这种错误的主要原因是ros的catkin_ws配置问题,可以运行rospack profile试试。
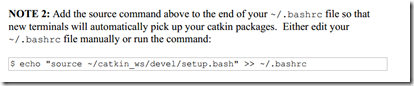
实在不行还有如下所示的两种解决方法。推荐第二种。
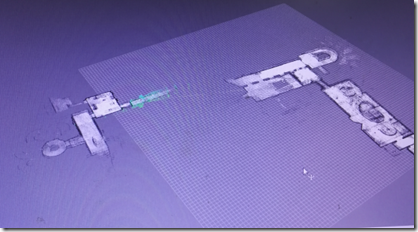
最终结果如下图,左侧为2d,右侧为3d。
Good luck!关于代码的原理解析,接下来的文章可能会详细探讨。

谷歌Cartographer学习(1)-快速安装测试的更多相关文章
- 谷歌Cartographer学习(1)-快速安装测试(转载)
转载自谷歌Cartographer学习(1)-快速安装测试 代码放到个人github上,https://github.com/hitcm/ 如下,需要安装3个软件包,ceres solver.cart ...
- 谷歌Cartographer学习 -快速安装测试
参考资料:https://www.cnblogs.com/hitcm/p/5939507.html PC下面进行安装: 遇到的问题如下 1.首先安装ceres solver 在编译的时候,如果是低配的 ...
- 谷歌Cartographer学习(2)-原理阐述与源码解析
最近终于写完了毕业论文.想仔细研究下Cartographer.无奈自己学识有限,先看下网上大牛的解析,作一个汇总. 一.泡泡机器人原创专栏-cartographer理论及实践浅析 http://mp. ...
- 学习Linux系列--安装Ubuntu
最近学习Linux,使用虚拟机太不方便,于是购买了阿里云最便宜的云主机作为学习设备. 本系列文章记录了个人学习过程的点点滴滴. 学习Linux系列--安装Ubuntu 学习Linux系列--安装软件环 ...
- python开发学习-day01 (python安装与版本、字符串、字典、运算符、文件)
*:first-child { margin-top: 0 !important; } body>*:last-child { margin-bottom: 0 !important; } /* ...
- Docker 快速安装&搭建 MongDB 环境
欢迎关注个人微信公众号: 小哈学Java, 文末分享阿里 P8 高级架构师吐血总结的 <Java 核心知识整理&面试.pdf>资源链接!! 个人网站: https://www.ex ...
- kubernetes(K8S)快速安装与配置集群搭建图文教程
kubernetes(K8S)快速安装与配置集群搭建图文教程 作者: admin 分类: K8S 发布时间: 2018-09-16 12:20 Kubernetes是什么? 首先,它是一个全新的基于容 ...
- 前端学习 node 快速入门 系列 —— 初步认识 node
其他章节请看: 前端学习 node 快速入门 系列 初步认识 node node 是什么 node(或者称node.js)是 javaScript(以下简称js) 运行时的一个环境.不是一门语言. 以 ...
- MongoDB学习笔记:快速入门
MongoDB学习笔记:快速入门 一.MongoDB 简介 MongoDB 是由C++语言编写的,是一个基于分布式文件存储的开源数据库系统.在高负载的情况下,添加更多的节点,可以保证服务器性能.M ...
随机推荐
- 在C#中如何将多个rtf文件内容组合在一起用一个rtf文件保存?
//重点为是使用 SelectedRtf 属性 private void button1_Click( object sender, EventArgs e ) { //mergeRTF为并内容后的 ...
- jQuery 插件基础
jQuery 插件基础 翻译 How to Create a Basic Plugin 如果你需要在 jQuery 选择器上执行一系列重复操作, 这时候你需要编写 jQuery 插件. jQuery ...
- 在sql server使用链接服务器中访问mysql
----创建ODBC链接EXEC sp_addlinkedserver @server = 'MySQL', @srvproduct='MySql' , @provider = 'MSDASQL', ...
- highcharts 柱状图 动态加载
highcharts柱状图动态加载 (1):导入样式 <script type="text/javascript" src="<%=request.getCo ...
- HTTP权威协议笔记-6.代理
6.1 Web的中间实体 Http的代理服务器即是客户端的服务器又是服务器的客户端. 它介于服务器与客户端之间,当客户端发送请求报文经过它时,它会像服务器一样正确的处理请求和返回响应,同时,代理服务器 ...
- WCF启用日志追踪
调用使用http post调用WCF Restful服务时,WCF会自动反序列化body里的实体,如果实体反序列化不成功时,会返回一个请求错误,让去看服务器日志.需要启用日志追踪功能,才能看到具体的情 ...
- php设计模式之单例模式使用示例
单例模式也就是只能实例化一次,也就代表在实例化时不可能使用new关键字,下面是使用示例,大家参考使用吧 <?php class EasyFramework_Easy_Mysql{ p ...
- CSS解决高度自适应问题
HTML结构如下: <div id="main"> <div id="top">top</div> < ...
- 转载:Solr的自动完成实现方式(第一部分:facet方式)
转自:http://www.cnblogs.com/ibook360/archive/2011/11/30/2269059.html 大部分人已经见过自动完成(autocomplete)的功能了(见下 ...
- Android应用自动更新功能的代码实现
由于Android项目开源所致,市面上出现了N多安卓软件市场.为了让我们开发的软件有更多的用户使用,我们需要向N多市场发布,软件升级后,我们也必须到安卓市场上进行更新,给我们增加了工作量.因此我们有必 ...