MIMO雷达中波形复用/分离的方法------TDMA\FDMA\DDMA\CDMA
最先接触到MIMO雷达的波形复用/分离的方法还是工作中负责的TI1843项目中了解的,主要还是时分多址波形(TDMA),当时刚接触时对这些很疑惑,再加上后面看到了频分多址波形(FDMA)、码分多址波形(CDMA)以及TI2944中提到的多普勒频分多址波形(DDMA),对这些东西了解但是不多,一直想着把他们学习整理一下。但是本人多少有点愚笨再加上有点懒,这件事拖了有好长时间了。凑着有时间就总结整理一下,如有侵权请联系删除。
一、MIMO基础知识:
在开始学习波形复用/分离之前,我们先简单了解一下MIMO的基础知识,方便后面的学习。虚拟阵列(MIMO)是一种通过增加TX通道数量来虚拟化更多RX通道的方法。以一个具有1个TX通道和4个RX通道的雷达系统为例子。如图1所示,与TX反射信号相对应的反射信号将在接收机处得到4个回波,每两个回波之间的相位差为w=(2Π/λ)dsin(θ)。
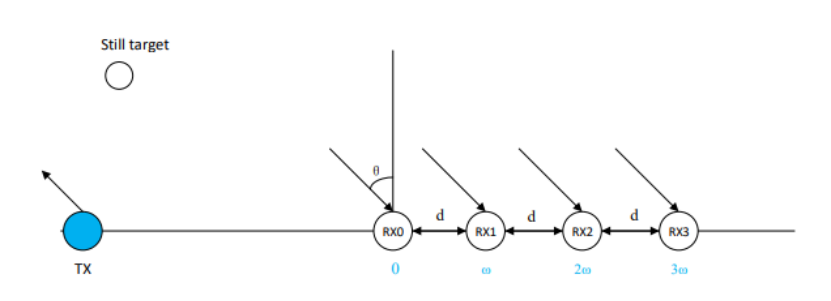
图1 1TX4RX
但是如果获得一个额外的TX信道,并让两个TX信道同时发送相同的信号,那么在来自TX0和TX1的反射信号之间将会有一个时间间隔。如图2所示。
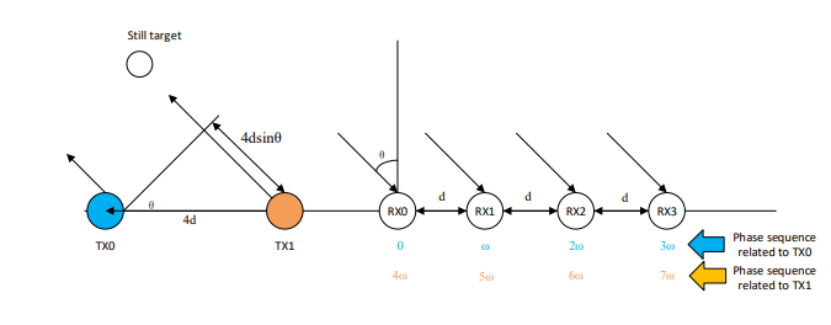
图2 2TX4RX
在接收端总共有8个反射信号的回波。这相当于在接收端将天线阵列的大小扩展为8。
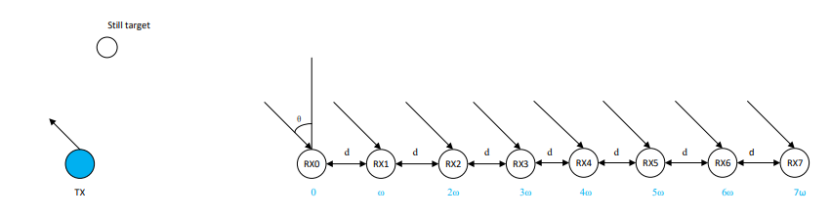
图3 1T8R
与实际有8个接收通道不同的是,对于虚拟阵列,每个RX天线要处理两个回波数据,因此必须想办法将二者分开。只有将其分开后,才可以正常运用虚拟的8个接收通道。常见的方法是将同一个RX通道接收的多个回波进行正交(orthogonal)处理。
二、MIMO雷达中常见的复用/分离
MIMO 雷达的基本概念,对于一个包含根发射天线,根接收天线的雷达系统,可以通过合适的 天线布局和波形设计来形成一个 × 的虚拟天线阵列,增加系统的(虚拟)天线数,从而提高角度分辨率。简单地说,为了形成虚拟天线阵列,发射端必须能在某个维度将根 发射天线的波形复用起来,接收端在接收到这个波形后必须能在相同的维度将根发射天线的波形分离出来。根据波形设计中这个复用/ 分离维度的选择,MIMO 雷达的波形可以分成四大类:
(1)TDMA(时分多址),
(2)FDMA(频分多址),
(3)DDMA(Doppler 维多址),
(4)CDMA(码分多址)
每一大类波形还包含一些小的波形子 类,这些波形的特点总结如下表
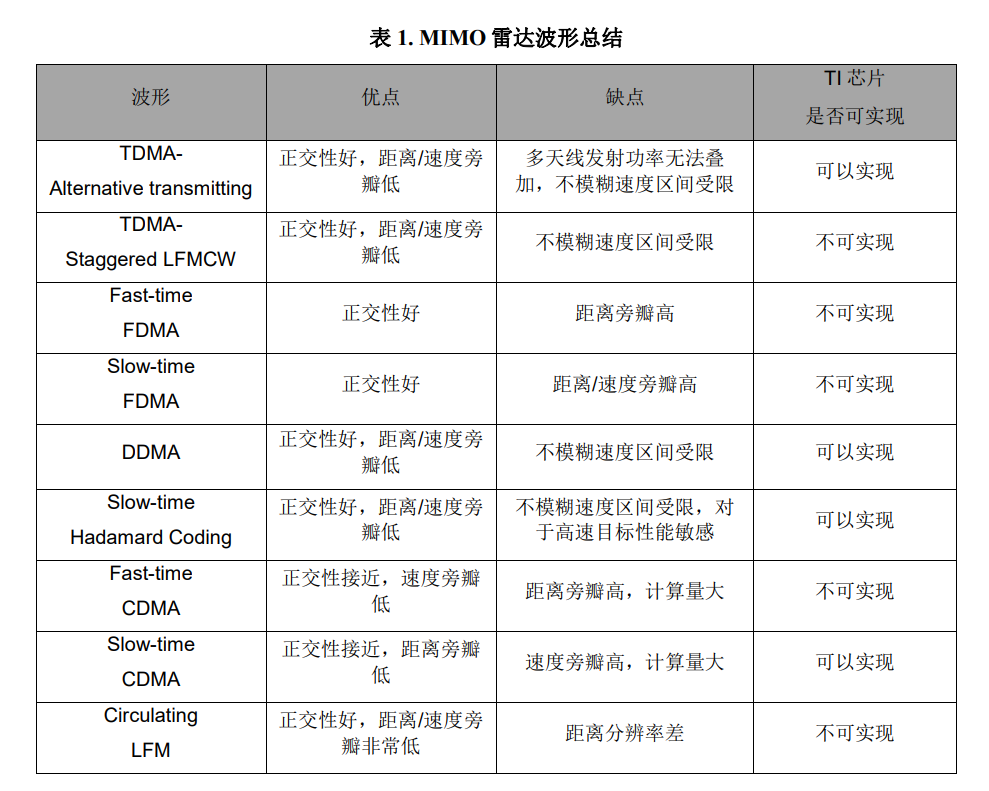
从实现的复杂度来看,分时发射的 TDMA 最为简单。但是 TDMA 在一个 chirp 周期内,只有一个发射通道打开,其它通道都处于关闭状态,这损失了其它通道的发射功 率,不利于提高雷达的探测距离。
1、TDMA原理
关于TDMA原理这部分会从两部分来说,第一部分是原理性的东西,能够更好的理解TDMA。第二部分是参考加特兰用户手册,给出几个通过时域调制来虚拟化RX信道的TDM方案,去更好的理解。
第一部分:TDMA波形
常见的TDMA MIMO波形有两种类型,一种是交替发射波形,一种是时间交错线性调频连续波。
1、交替发射波形
交替发射波形中的一个例子如图4所示,图中左侧分别用带有T的方块和R的方块标记了发射阵元和接收阵元。发射阵元线性排列于整个阵列的边缘,接收阵元稀 疏排列于阵列中间位置,为了方便表示交替发射的过程,图中将发射阵元与接收阵元 分开表示,发射阵元和接收阵元的中间用一条线串起的圆圈标记了虚拟阵元排成的线 性等距阵列,绿色方块表示处于工作状态的发射阵元,用绿色圆圈表示处于工作状态的虚拟阵元,当某一个发射阵元发射信号时,接收阵元同时接收,但其他发射阵元处于未工作状态。图中右侧圆圈分别表示了四个发射阵元交替发射的四种不同的虚拟阵元工作状态,从图中可以看出,发射阵元交替发射自己的波形,且任意两个发射之间没有重叠。
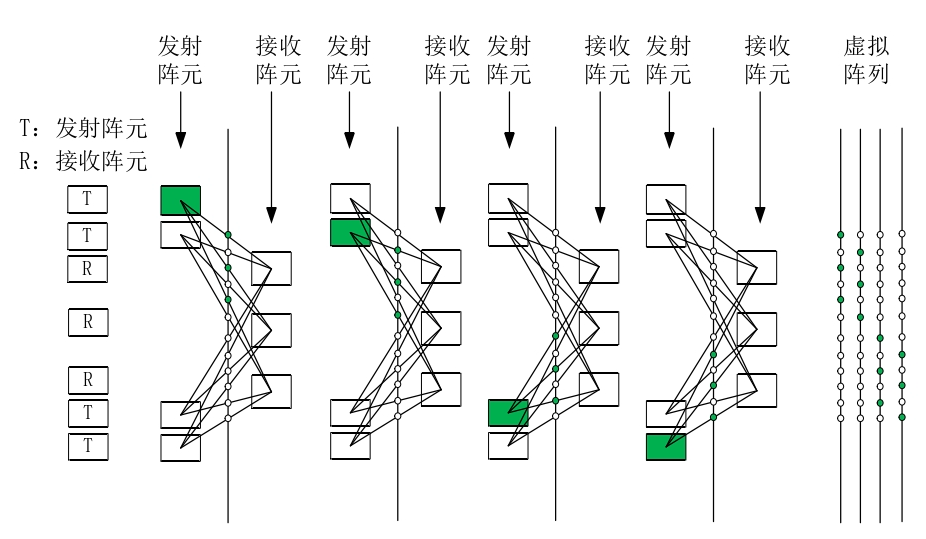
图4 交替发射波形
图5中用时间频率图也表示了该交替发射波形,共有四个发射阵元,τ表示脉冲宽度。T表示公式(2-1)中的TDMA延迟系数TTDMA,Tr表示脉冲重复间隔,以线性调频信号为例,当第n个发射阵元发射波形时,其他发射阵元不工作,接收时接收阵元同时接收,这种交替发射的TDMA波形可以实现理想的正交性,并且常规的 雷达波形(如线性调频波形、相位编码波形)可以直接应用于该波形中。
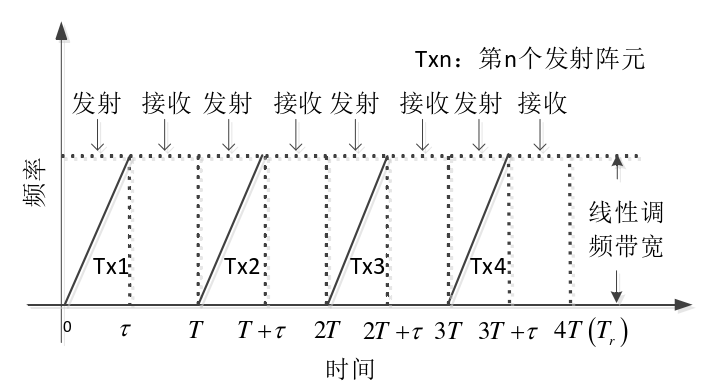
图5 交替发射波形示意图

2、 时间交错线性波形
如图6所示图中不同颜色的线表示不同发射阵元的发射信号。假设有四个发射阵元,每个发射阵元发射的是同一 个线性调频连续波信号的时间延迟的形式,每个信号在时间上的间隔是波形重复间隔 (图中T)的四分之一。不同于以往的交替发射TDMA,这种时间交错的线性调频连续波TDMA波形允许所有发射天线同时发射信号,从而充分利用了所有天线的发射能力。另外,由于可以在回波中分离不同发射对应的信号,并且可以在滤波后去除来自其他发射中不需要的交叉干扰,所以这种TDMA波形具有非常好的正交性。但是, 时间交错的线性调频连续波波形由于每个阵元发射相同的信号,只是在时间上有延迟,如果延迟较小,则会造成雷达不模糊距离较小。
如图6中所示目标回波,当发射阵元1刚开始发射的信号照射到较远距离的目标时,该目标回波为图中所示黑色虚线, 当发射阵元2首次发射的信号照射到较近的目标时,该目标回波也是图中所示黑色虚线,当不同阵元发射的信号时间间隔较小时,很容易造成目标回波的重叠,从而产生回波的模糊,无法分辨目标到底是近处目标还是远处目标。由于该波形的脉冲重复频 率较高,距离模糊问题严重,所以很难将其应用于普通雷达中。
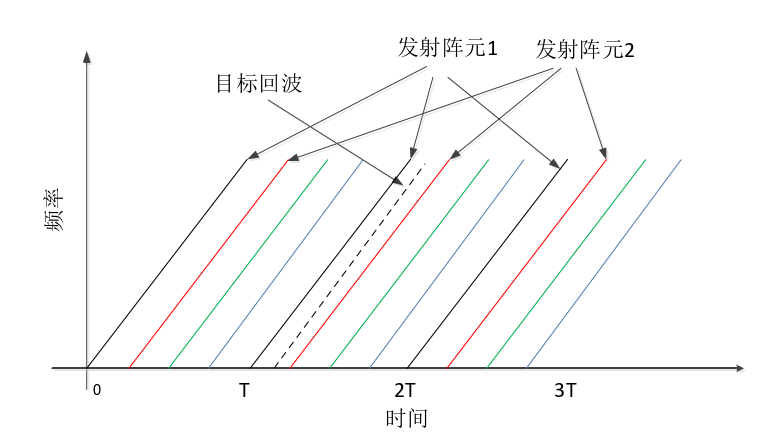
图6 交替发射波形示意图
第二部分:加特兰给出的TDMA方案
TDMA原理参照的是加特兰用户手册上的讲解,讲解的还是蛮详细的。通俗易懂TDM方案通过时域调制来虚拟化RX信道。由于Alps有4个TX通道和4个Rx通道,因此可以虚拟创建8、12或16个Rx通道。如图7、8、9所示
图7 2TX通道TDM虚拟阵列方案
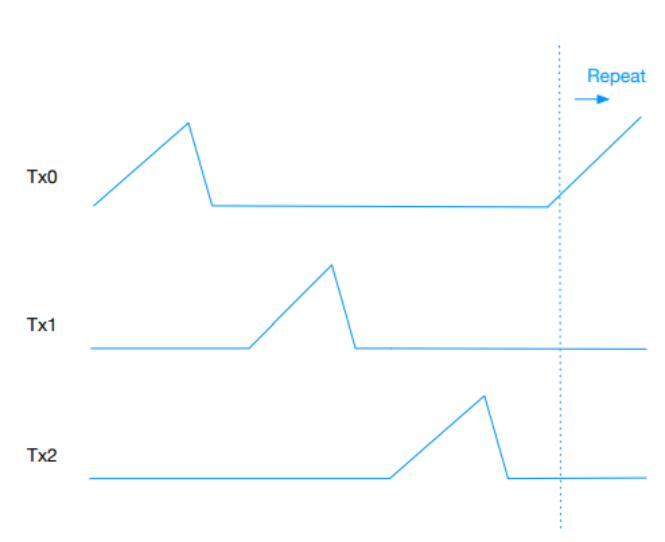
图8 3TX通道TDM虚拟阵列方案
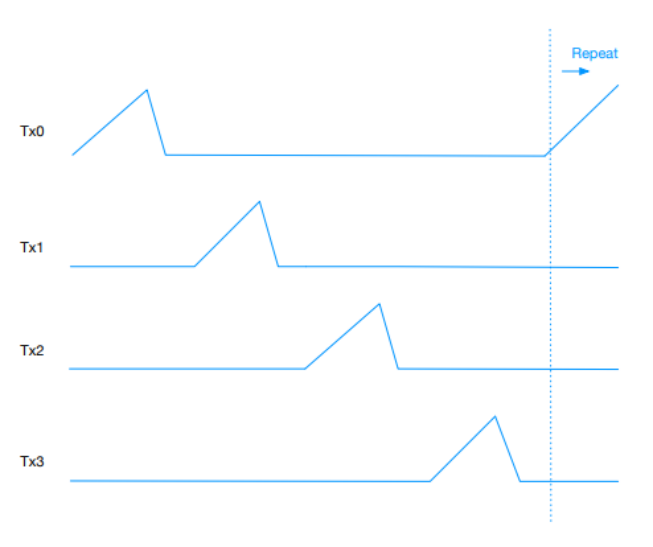
图9 4TX通道TDM虚拟阵列方案
通常TDM方案仅仅是针对帧中特定的chirp打开一个TX天线。为了实现虚拟化,需要设计天线,使得TX天线的间隔等于RX天线阵列的总孔径。例如,如果RX天线阵列是间距为lamda/2的联合线性阵列(ULA),那么TX天线的间距应该是2*lamda,来实现具有最大孔径的TDM的相应虚拟阵列。
从上面的7、8、9图不难看出,不同的RX通道的数据是通过chirp来区分的。如果Tr表示chirp的长度,Tr’表示TDM方案中chirp的周期,Nva表示TX信道的数量(虚拟阵列组的数量),那么Tr’=Tr*Nva。
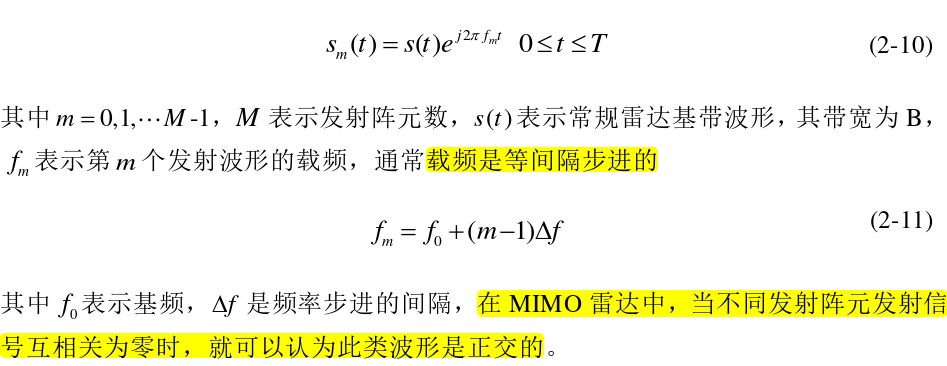
2、FDMA原理
FDMA波形,又称为正交空间频率编码。FDMA有两种不同的实现形式,一种 是快时间FDMA波形,在单个脉冲上对不同发射信号进行频率编码;一种是慢时间 FDMA波形,在不同的脉冲中对同一发射信号进行频率编码。
2.1 快时间FDMA波形:
快时间FDMA波形如图10所示,图中Tx表示发射天线,以线性调频信号为例, 每一个发射天线所发射的信号在不同脉冲中保持不变,各自的频率不同。
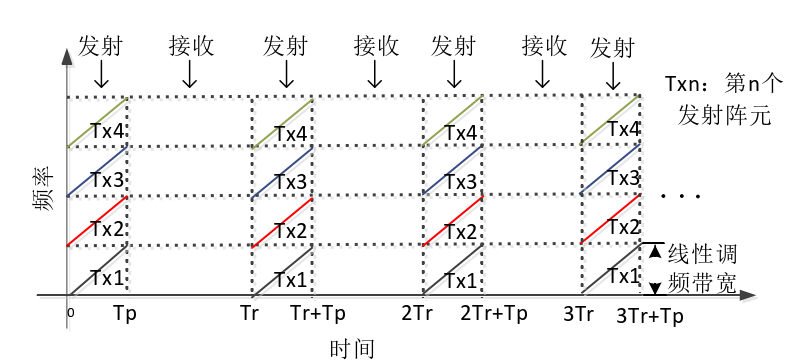
图10 快时间FDMA波形
假设有四个发射天线,每个发射天线发射一个频率不同的信号,在一个相干积累时间内同一个天线发射的信号始终相同。由于频谱不重叠,不同天线同时发射的信号是相互正交的。 第m个发射阵元的快时间FDMA波形可以写成:
2.2 慢时间FDMA波形:
另一种FDMA波形是慢时间FDMA波形,在这种情况下,每个天线在不同的脉冲中发射不同的载频信号,各个阵元之间的相位关系会随脉冲变化,而同一时间各个天线发射信号的载频不同。由于载频的细微区别,虽然同一个脉冲内不同阵元信号是相关的,但长时间(很多脉冲相干积累时)会造成慢时间正交。如图11所示,在这种慢时间的FDMA波形中,即使MIMO雷达只有几个发射天线,也可以最大化利用多脉冲的自由度。
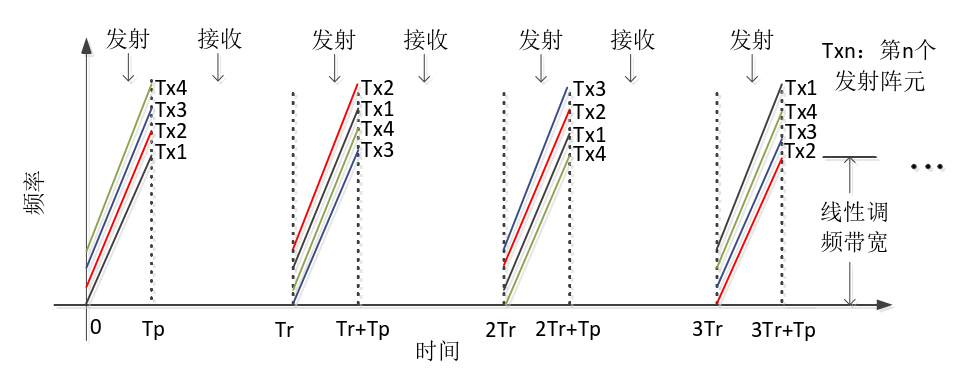
图11 慢时间FDMA波形
3、CDMA原理
CDMA波形是指不同的发射天线通过快时间或慢时间的正交相位调制发射不同的信号的波形,同样可以在接收机中对这些信号进行分离。由于不存在具有良好的自相关和互相关特性的理想正交码序列,因此CDMA MIMO波形仅可以近似满足正交性要求。
3.1、快时间DDMA波形
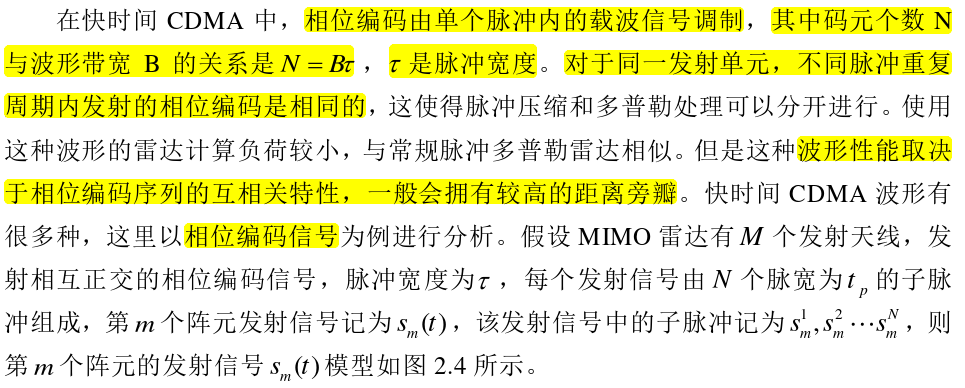

但是上述给出的条件都要求波形具有理想的自相关和互相关特性,在实际中不可能达到,只能尽可能使得自相关旁瓣较低,波形之间互相关尽可能小。正交相位编码信号的自相关函数近似冲激函数,同时其自相关函数受相位编码合集φ的影响,因此,其正交性依赖于序列的设计。
3.2、慢时间CDMA波形:
在慢时间CDMA波形中,相位编码用于调制不同脉冲的初始相位。波形带宽仍然取决于每个脉冲中传输的信号。类似地,慢时间相位编码CDMA波形的距离旁瓣也由每个脉冲中传输的信号确定,因此通过脉冲波形的设计容易获得较低的距离旁瓣, 但是往往难以通过编码设计得到较低的多普勒旁瓣,其旁瓣取决于相位编码序列的互相关特性。在本文介绍的DDMA波形就是慢时间CDMA的一个特例,DDMA波形具有严重的多普勒模糊问题。在慢时间CDMA波形中, 如果使用相同的相位编码,则多普勒角度模糊度函数将具有与快时间CDMA波形的距离角度模糊度函数相同的特性。由于该波形是对多个脉冲进行调制,其正交性受移动目标的多普勒频率影响,所以该波形的脉冲压缩和多普勒处理不能分开进行,它们必须进行联合处理,这最终导致其计算量要比快时间CDMA波形的大得多。
3.3、加特兰BPM的案例
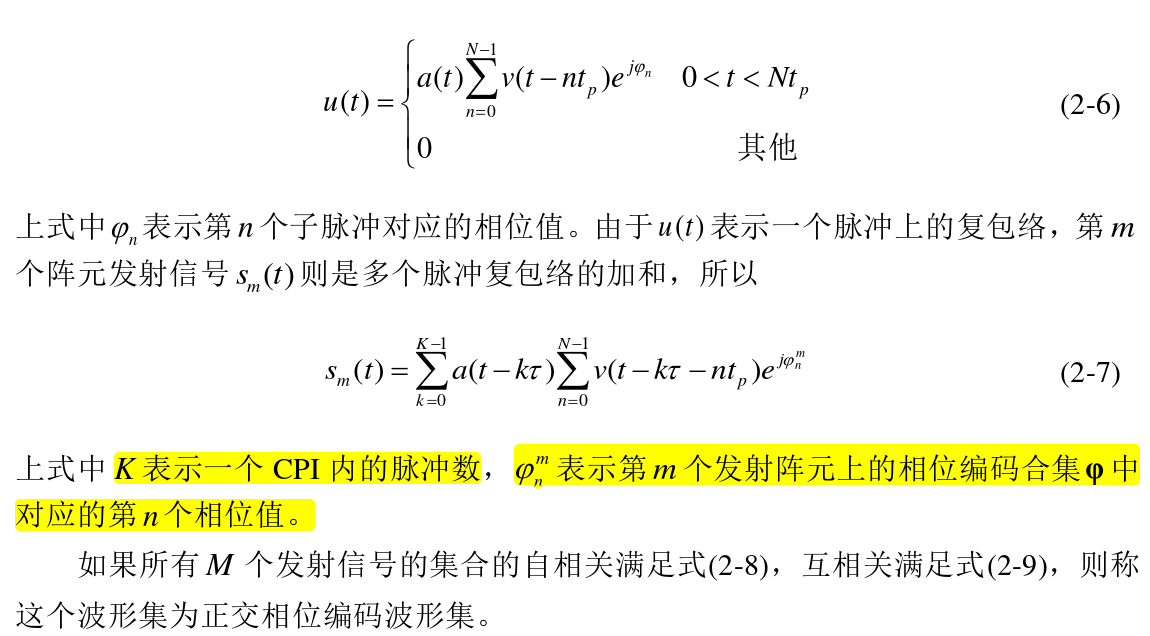
这里再补充一个加特兰的BPM方案,应该也是CDMA的一种,它通过利用Hadamard矩阵的编码域来虚拟化RX信道。与TDM相比,BPM具有更大的总发射功率。但是,由于不存在3*3的Hadamard矩阵,BPM只能虚拟创建8RX阵列或16RX阵列。图7和图8给出了这两种方案。
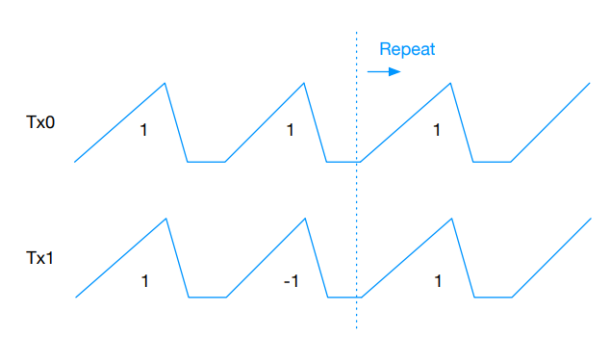
图7 2TX通道BPM虚拟阵列方案
图8 4TX通道BPM虚拟阵列方案
Chirp内的标签表示特定TX信道上相应的chirp相位。1表示相位0°,-1表示相位180°。BPM天线设计方案和TDM天线设计方案相同。从上面BPM和TDM的图中我们不难发现二者的不同对应于TX信号数量的多个回波混合在一个线性调频脉冲中,我们必须有相应数量的线性调频脉冲来求解方程并分离不同的RX信道的数据。由于数据是线性叠加的,所以可以在DOA之前的任何阶段进行分离。为减少计算量,可在CFAR之后和DOA之前进行分离(解调),具体如何分离大家可以查看加特兰用户手册,里面有详细的介绍。
最后,因为所有的发射天线是同时发射的,BPM的总能量要强于TDM,这就意味着BPM具有更高的SNR。但是BPM仍有和TDM一样的缺点,就是chirp周期变长。
4、DDMA原理
关于DDMA原理同样是给出两种不同方法来解释:一种是学院风格,一种是工程风格。个人觉得工程风格可能比较好懂一点。
4.1 学院风格:
DDMA波形是一种慢时间MIMO波形,可以看作是慢时间CDMA或慢时间 FDMA的特殊情况。在DDMA波形中,由不同天线发射的信号其中心频率略有偏移,以便在多普勒域将不同发射对应的信号分开。相邻两个天线间的频率间隔一般情况下
应当满足两个要求:(1)频率间隔应当大于等于1/τ(τ是脉冲宽度),以满足正交性要求;(2)频率间隔应当大于等于最快的移动目标的多普勒频移的两倍,以保证信号在多普勒域可以分离。
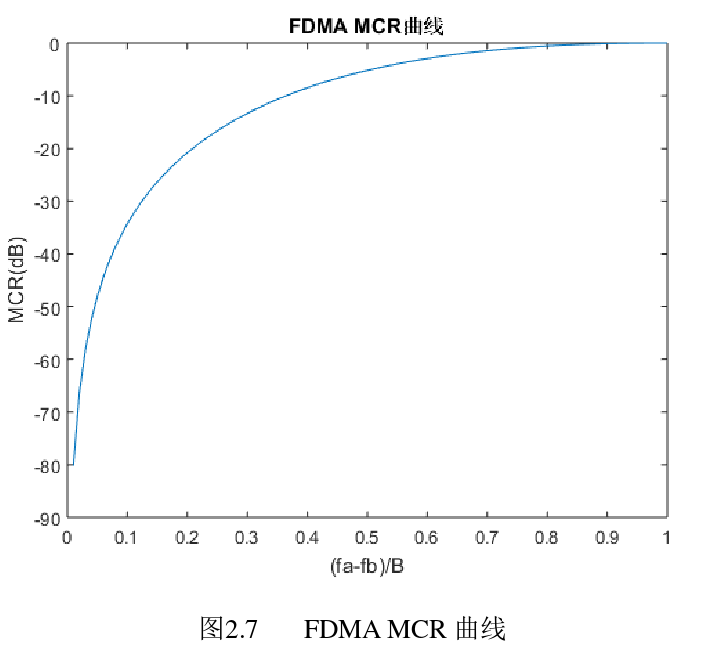
在之前介绍的快时间FDMA波形中,MIMO雷达通常会同时发射所有M个不同频率波形。 然后,N个接收机会通过一组匹配滤波器对M个发射信号进行对应分离。FDMA波形有很多种,具体取决于Δf的大小。但是,随着Δf 的增大,自适应杂波相消比(MCR)会迅速衰减,MCR用来衡量不同波形的杂波相关性。


4.2 工程风格:
DDMA 波形下所有发射天线同时发射,但是每个发射天线的信号都偏移一个特定的频率,通过这个人为偏移的频率使不同发射天线的信号在 Doppler 域上能分离开来。在 DDMA 波形下,一个目标在不同发射天线的信号照射下所形成的回波中检测到的速度值是不同的,利用这种速度的不同,对一个目标我们可以把不同发射天线的信号在接收端分离出来。需要注意的是,不同发射天线上的频率偏移是通过在 chirp 之间(也就是’slow time’上)施加不同的相位旋转而实现的,而在 chirp 内(也就是’fast time’上)信号的相位是不变的。
如图 12所示,假设总共有根发射天线,那么对于发射天线k,在相邻 chirp 上施加的相移由下式决定:
 (1)
(1)
其中N=Nt。
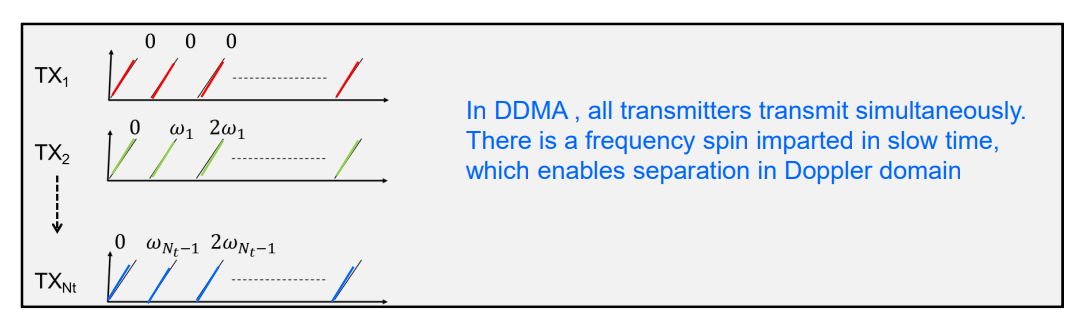
图12 DDMA波形原理
一个四发的 DDMA 雷达系统的发射相位设置如图 11 所示,和 TDMA 相比,DDMA 下根发射天线同时发射,相比 TDMA 能获得的分集发射增益_为:
 (2)
(2)
根据公式(2), 四根发射天线下 DDMA 相比 TDMA 能够获取大约 6dB 的分集发射增益,这对于提高雷达的探测距离是非常有益的。DDMA 波形的缺点是由于人为地在每个发射通道上附加了频偏,导致雷达的最大不模糊速度区间 (也就是最大不模糊 Doppler 域)变小了。公式(3)指出了雷达的最大不模糊速度是由 chirp 周期决定的,而 Doppler 公式指出了目标的 Doppler 频率和速度间存在下面公式(4)的关系:
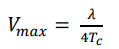 (3)
(3)
 (4)
(4)
结合公式(3), (4)我们可以得到雷达的最大不模糊速度区间[−, ] 所对应的 Doppler 频率区间[_ , _] 为[− 1/ 2 , 1/2 ], 整个不模糊 Doppler 域的长度为_-_=1/Tc。
DDMA 下,在同一根发射天线的不同 chirp 之间,除了累积有目标速度带来的 Doppler 频移外,还会累积人为施加的 DDMA 频偏。从公式(1), 相邻两根发射天线的 chirp 间相移值差Δω = 2/。那么同一个目标,在相邻两根发射天线信号所产生的回波中 Doppler 频率差∆为:
 (5)
(5)
将公式5代入公式3和4中得到同一个目标,在相邻两根发射天线信号所产生的回波中检测出的速度值相差:
 (6)
(6)
为了不混淆不同发射天线的数据,目标的最大速度不能超过∆,也就是说雷达的最大不模糊速度区间(或最大不模糊 Doppler 域)变为了原来的 1/N。
图13 四根发射天线上的DDMA
如图 13 所示,以四发(N=4)为例,在没有 DDMA 的情况下雷达的不模糊速度区间是[−, ],采用了 DDMA 后,等效于将这个区间分为了长度相等的 A,B,C,D 四个子区间。对同一个目标,四根发射天线的回波信号将分别落 入这四个子区间,且相邻两根发射天线对应的回波信号的速度值相差/2. 在0 < v < /2的情况下, Tx1/2/3/4 的回波信号将分别落入子区间 C/D/A/B,此时不会产生速度模糊,我们可以按照 C/D/A/B 顺序依次分离出 Tx1/2/3/4 的数据,这就是所谓的 DDMA 解调。但如果v 超出了这个范围(如图13中的 case2,3,4 情况), Tx1/2/3/4 和子区间 C/D/A/B 的对应关系就会发生改变,此时用户就无法再仅仅根据子区间的位置去分离不同的发射天线数据,这就是所谓的 DDMA 速度模糊。
三、总结:
在介绍完这些原理后,将表 1 中 MIMO 雷达波形做一个比较。FDMA 需要在 chirp 周期内产生多个不同频率的 FMCW 波形,Fast-time CDMA 需要在 chirp 周期内改变发射相位,而 TDMAStaggered LFMCW 和 Circulating LFM 波形都需要将一个 FMCW 波形在不同天线上延时发射,这在当前的毫米 波雷达芯片上是无法实现的。在剩下可实现的波形中,TDMA 因为浪费了多通道的发射能力,不利于提高雷达探测距离。Slow-time CDMA 的速度旁瓣会受 CDMA 码的正交性影响。Slow-time Hadamard coding(BPM 波形就 是它的一种实现)和DDMA 具有类似的距离/速度旁瓣,但是它的速度解模糊需要在 chirp 之间完成(而 chirp 之间 的 Doppler 频偏是无法被完全纠正的),导致发射天线之间会引入残留的 Doppler 频偏,这对于高速目标进行稳定的解速度模糊提出了很大的挑战,从这一点看 DDMA 对于高速目标的测速稳定性要高于 Slow-time Hadamard coding。
因此,综合来看 DDMA 波形在测距测速能力,可实现性上都比较适合下一代高性能雷达的要求,是未来主流的雷达波形之一。当然 DDMA 波形存在最大不模糊速度区间下降的问题,必须找到合适的解速度模糊算法,才能进行实际的应用。
本文基本上到这就结束了,最后再做一个总结和展望,主要包括的还是FDMA\CDMA\TDMA\DDMA这些相关知识,不过更为详细的解释了它们之间的主要区别,也给出了一些图片和例子,可以更好的去理解和掌握(个人看完感觉至少知道了这些的区别和如何去实现的)。后面应该会针对DDMA解速度模糊算法进行进一步的学习。大家如果感兴趣的话不妨关注一下。咱们下次再见了。
四、参考内容:
1、基于 AWR2944 的汽车雷达 DDMA 波形的原理和实现
2、加特兰用户手册
3、机载DDMA MIMO雷达杂波建模与杂波抑制(这个原理讲的很清晰)
MIMO雷达中波形复用/分离的方法------TDMA\FDMA\DDMA\CDMA的更多相关文章
- 隐写-CTF中图片隐藏文件分离方法总结
0x00 前言 在安全的大趋势下,信息安全越来越来受到国家和企业的重视,所以CTF比赛场次越来越多,而且比赛形式也不断的创新,题目也更加新颖有趣,对选手的综合信息安全能力有一个较好的考验,当然更好的是 ...
- CTF中图片隐藏文件分离方法总结
0x00 前言 在安全的大趋势下,信息安全越来越来受到国家和企业的重视,所以CTF比赛场次越来越多,而且比赛形式也不断的创新,题目也更加新颖有趣,对选手的综合信息安全能力有一个较好的考验,当然更好的是 ...
- CTF中图片隐藏文件分离方法
CTF中图片隐藏文件分离方法 0x01 分析 这里我们以图片为载体,给了这样的一样图片:2.jpg 首先我们需要对图片进行分析,这里我们需要用到kali里面的一个工具 binwalk ,想要了解这 ...
- Sql server Always On 读写分离配置方法
使用了Sqlserver 2012 Always on技术后,假如采用的配置是默认配置,会出现Primary server CPU很高的情况发生,比如默认配置如下: 需要自定义来解决这个问题. 我们先 ...
- ES5和ES6中对于继承的实现方法
在ES5继承的实现非常有趣的,由于没有传统面向对象类的概念,Javascript利用原型链的特性来实现继承,这其中有很多的属性指向和需要注意的地方. 原型链的特点和实现已经在之前的一篇整理说过了,就是 ...
- Axure中移动端原型设计方法(附IPhoneX和IPhone8最新模板)
Axure中移动端原型设计方法(附IPhoneX和IPhone8最新模板) 2018年4月16日luodonggan Axure中基于设备模板的移动端原型设计方法(附IPhoneX和IPhone8最新 ...
- iOS 在cell中使用倒计时的处理方法(新)
一.前言 之前的文章iOS 在cell中使用倒计时的处理方法得到大量的支持, 在这先感谢大家的支持. 但是也收到不少人的回复表示不会用, 需要一一解答, 由于之前写的时候没有使用Markdown编辑, ...
- 清除LabVIEW中波形图表或波形图中的历史数据
清除LabVIEW中波形图表或波形图中的历史数据 方法一: 前面板中右键单击波形图表或波形图,选择数据操作>>清除图表或数据操作>>清除图形 方法二:(编程方法) 用于清除图表 ...
- 我要告诉你:java接口中可以定义private私有方法
在传统的Java编程中,被广为人知的一个知识点是:java Interface接口中不能定义private私有方法.只允许我们定义public访问权限的方法.抽象方法或静态方法.但是从Java 9 开 ...
- Python中,类的特殊方法与内置函数的关联
目录 Python类 Python类的设计原则 特殊方法[Special methods] Duck typing 内置函数 English Version The key design princi ...
随机推荐
- 强国杯南部西部赛区分区晋级赛WP
Misc 空白文件 解压的文件,通过kali strings 查看到base64加密,把%7B换成'{',%7D换成'}' 迷惑的时间 导出3.jpg原始数据信息 去掉没用的头部信息,得到3.jpg图 ...
- 驱动开发:内核ShellCode线程注入
还记得<驱动开发:内核LoadLibrary实现DLL注入>中所使用的注入技术吗,我们通过RtlCreateUserThread函数调用实现了注入DLL到应用层并执行,本章将继续探索一个简 ...
- 自然语言处理 Paddle NLP - 信息抽取技术及应用
1.什么是信息抽取 即自动从无结构或半结构的文本中抽取出结构化信息的任务(病历抽取) 2.实体抽取 3.关系抽取 4.事件抽取 信息抽取和知识图谱是一个上下游的关系.抽取的结果,可以组装成知识图谱(一 ...
- 【后端面经-Java】Java创建线程的方法简介
目录 1. 线程的基本概念 1.1 线程 1.2 线程状态和生命周期 2. 创建线程的四种方法 2.1 继承Thread类 2.2 实现Runnable接口 2.3 实现Callable接口 2.4 ...
- SAP ABAP 动态结构实现发送企业微信应用消息
企业微信官方接口: 应用支持推送文本.图片.视频.文件.图文等类型. 请求方式:POST(HTTPS)请求地址: https://qyapi.weixin.qq.com/cgi-bin/message ...
- 驱动开发:应用DeviceIoContro模板精讲
在笔者上一篇文章<驱动开发:应用DeviceIoContro开发模板>简单为大家介绍了如何使用DeviceIoContro模板快速创建一个驱动开发通信案例,但是该案例过于简单也无法独立加载 ...
- 【Shell】字符串
单引号和双引号 shell 字符串可以用单引号 '',也可以用双引号 "",也可以不用引号. 单引号的特点 单引号里不识别变量 单引号里不能出现单独的单引号(使用转义符也不行),但 ...
- 解决php中通过exec调用python脚本报ModuleNotFoundError错误
背景 出于某些原因,我们有时会在PHP中通过exec来调用Python代码,有可能是某些功能只能用Python实现(或用Python实现比较方便),有可能是出于性能考虑(Python可以执行耗时任务) ...
- 【NestJS系列】DI依赖注入与IOC控制反转
前言 上篇文章我们学习了如何使用nest-cli来快速生成一个NestJS后端项目,当我们打开编辑器查看代码时,会发现整个代码风格有点类似JAVA的spring框架,并且你会发现一些service类在 ...
- JPA自动生成POJO
原文地址 JPA自动生成POJO 通过表生成POJO类 这篇文章不涉及idea配置数据源教程,该文章使用前提是用户已配置好idea数据源 修改自带的生成类 import com.intellij.da ...